多变量系统的变时滞无模型自适应广义预测控制
2020-11-20侯小秋
侯小秋
(黑龙江科技大学 电气与控制工程学院,哈尔滨 150022)
0 引 言
一些实际的工程系统其数学模型有时是无法建立的,针对无法建模的控制问题,产生了数据驱动控制的研究。侯忠生等[1]提出的无模型自适应控制,一经提出在理论研究和应用研究上均取得了很好的发展,但对时滞是变化的非线性系统无模型控制的问题,研究的文献较少。文献 [2-4]研究了可在线修正控制参数的变时滞无模型的PID控制问题。文献[2]给出可在线修正控制参数的变时滞无模型的滤波PID控制,控制算法虽无预测控制功能,但可用于噪信比较大的随机干扰和快变化干扰的时变时滞非线性系统。文献[3]给出可在线修正控制参数的多变量变时滞无模型的滤波PID控制。文献[4]给出可在线修正控制参数的多变量变时滞的无模型预测滤波PID控制算法。笔者根据无模型自适应控制算法,结合文献[5]的多变量广义预测控制,研究在线优化目标函数的加权系数参数的变时滞多变量无模型自适应广义预测控制。
1 改进的系统泛模型与参数估计
1.1 改进的泛模型
文献[4]给出一个更加有效的多变量紧格式动态线性化的系统泛模型:
Δy(t)=q-dψ(t)Δu(t)+v(t),
(1)
式中:y(t)——多变量系统n维输出;
u(t) ——多变量系统n维输入;
d——时滞;
v(t)——辅助向量;
ψ(t)——梯度矩阵参数;
Δ——多项式,Δ=1-q-1。
v(t)、ψ(t)的意义见文献[4],该泛模型克服了侯忠生提出的泛模型存在的问题。
1.2 参数在线联合估计







α——加权系数;

round(·)——四舍五入取整;


2 无模型广义预测控制
参考文献[5]的多变量广义预测控制的算法,给出无模型广义预测控制的算法。
由式(1)逐步迭代得,多变量预测模型为





(2)


j——预测步数。












式中,p——控制输入时域长度。
令

(3)

(8)
ΔuT(t+p-1)],

参考输入轨迹矢量为
式中,yr(t)——多变量系统参考输入。
系统的目标函数:
(4)
式中:ρ——输出的加权系数矩阵,ρ=diag[ρ1,ρ2,…,ρN];
λ——输入的加权系数矩阵,λ=diag[λ1,λ2,…,λN],
N——ρ和λ的维数,N=pn。
(5)
3 参数在线寻优
3.1 梯度表达式
控制器可调参数向量为
ηT=[ρ1,ρ2,…,ρN,λ1,λ2,…,λN]。

式(1)两边对ηi求偏导得
(6)
由式(6)可得∂yi(t)/∂η,i=1,2,…,n。
式(1)两边对ηi求偏导得
(7)
式(5)两边对ρi求偏导得

(Yr-Ym)。
(8)

式(3)两边对ηi求偏导得
(9)
则由式(9)可得,∂Ym/∂ρi、∂Ym/∂λi和∂Ym/∂ηi。
3.2 二阶导数矩阵
式(6)两边对ηl求偏导得
(10)
由式(10)可得,∂2yj(t)/∂η2。
式(7)两边对ηl求偏导得
(11)
式(8)两边对ρl求偏导得

(12)
由式(12)可得,∂2ui(t+j)/∂η2,i=1,2,…,n,j=0,1,…,p。
式(9)两边对ηj求偏导得
(13)
由式(13)可得,∂2Ym/∂ρiρl、∂2Ym/∂ρiλl、∂2Ym/∂λiλl。
3.3 在线优化参数算法
文献[7]给出了一具有克服算法病态的直接极小化指标函数的自适应控制算法,应用该算法进行参数寻优。
将目标函数改进为
yr i(t+d+p-1)]2+
λu[ui(t+p-1)-ui(t+p-2)]2},
式中:yr,i(t)——yr(t)参考输入的分量;
λu——加权因子;
g*(·)——目标函数。
给出如下在线优化参数算法

[ui(t+p-1)-ui(t+p-2)]},
(14)

ρg(t)——收敛因子;
Q(t)——Hessian矩阵。
Q(t)=Q(t-1)+ρg(t)·
(15)
式中,λη(t)——控制器可调参数向量增量约束项的权重对角矩阵。
(Yr-Ym)。

式(14)、(15)的矩阵求逆及克服算法病态的λη(t)的确定可参考文献[8]的算法。
4 仿真与结果分析
被控对象当0≤t≤200,d=7时,有
[1+ξ1(t)]u1(t-7)+u2(t-7),
0.45u1(t-7)+[0.4+ξ2(t)]u2(t-7),
式中,ξ1(t)、ξ2(t)——慢变化干扰,ξ1(t)=0.1sin(2πt/200)、ξ2(t)=0.1cos(2πt/200)。
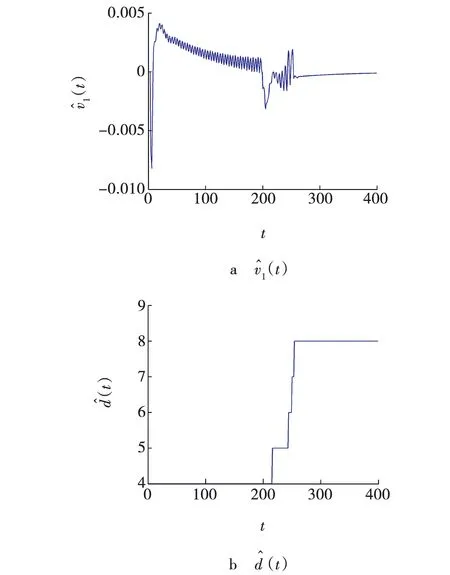
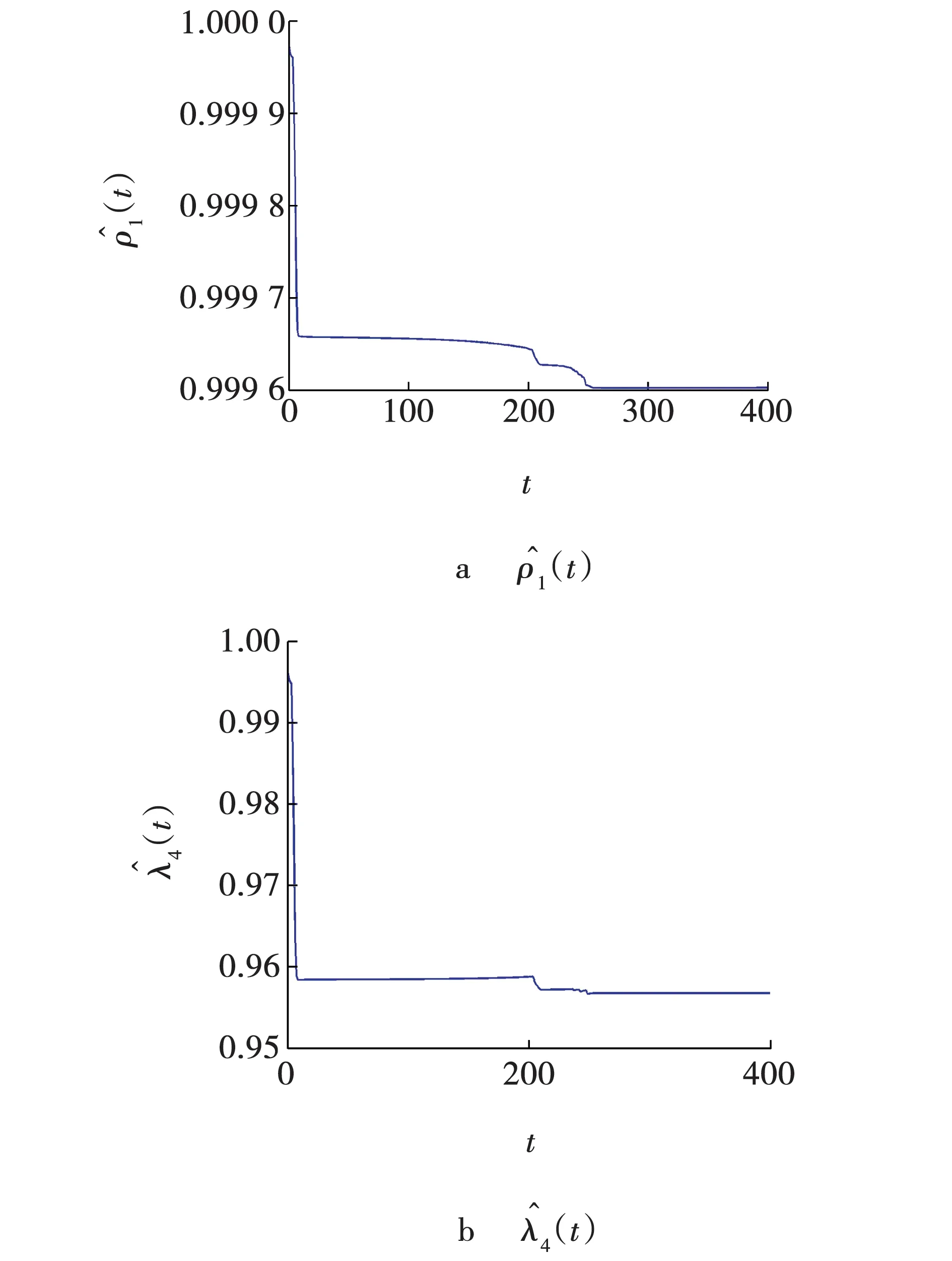
当200 系统的参考输入yr,1(t)=1(t)、yr,2(t)=0.6·1(t),输入的饱和限幅U1max=0.8、U2max=0.4。 泛模型中参数的初始值为 控制参数寻优的目标函数中的加权因子为λu=1,直接及小化中的Q(0)=10^3.5I。仿真结果如图1~4所示。 图1 系统输出单位阶跃响应曲线Fig. 1 Unit step response curve of system 图2 泛模型参数的估计曲线Fig. 2 Estimation curve of universal model pending parameter 图3 泛模型参数的估计曲线Fig. 3 Estimation curve of universal model pending parameter 图4 加权系数参数优化曲线Fig. 4 Optimazing curve of weighting coefficient paramter (1) 研究了时变时滞的多变量无模型自适应广义预测控制,多变量广义预测控制算法结合的无模型自适应控制算法,提出了多变量被控系统的无模型自适应的广义预测控制算法。 (2)给出目标函数中加权系数参数的在线优化算法,克服了试凑法选取的问题,从系统的泛模型和输出预测模型及控制器表达式出发,推导出了系统输出量和输出多步预测值及控制输入量序列关于控制参数的二阶导数矩阵及梯度表达式。该表达式简单、具有较小的计算量。 (3)目标函数中引入控制输入增量约束项,采用加权对角矩阵进行加权,可克服算法病态。将文中的研究推广到偏格式动态线性化系统泛模型及全格式动态线性化系统泛模型上,提出的具有参数优化的变时滞多变量无模型自适应广义预测控制算法的稳定性有待进行研究。





5 结 论
