包装机连续取袋机构设计
2020-11-19白大洪
白大洪


摘要: 为了提高包装速度,为包装机连续不断的提供预制袋,实现自动包装机连续取袋机构的设计。方法 在基于盘形槽凸轮和连杆机构的基础上,设计了一套预制袋在连续自动充填形式下的连续自动取袋机构,实现连续取袋动作,并对机构涉及的槽型盘凸轮机构和连杆机构参数进行了详细的计算。结果 针对包装机的运行特点设计出了连续取袋机构,每分钟可以连续取45个预制袋。结论 提高了包装机的上袋速度,在提高包装效率的同时还能很好的与其它工位保持同步性。
关键词: 包装机;预制袋;机构设计
[中图分类号] TH122
引言
塑料预制袋在各个行业都有着广泛的应用。然而,跟其他包装方式相比,预制袋包装相对效率低下。市场上存在的预制袋填充机多是间歇式多工位作业,即取袋、开袋、封口多工位分置进行。这些动作的时间最大值为该机包装周期的停顿时间,这些停顿时间一定程度上造成生产效率低下。[1]为了提高生产效率减少间歇时间,实现连续取袋,针对取袋给袋工艺要求,对取袋机构进行合理的设计选型和参数设计,从而满足包装机连续取袋的需求。[2]
1总体设计
本设计基于的回转式包装机有六个工位,六个工位由一个电机驱动,工位间没有间歇,在提高效率的同时还能使六个工位保持同步运行。本设计在考虑机构的结构时主要要考虑本工位和其它工位同步的问题。
鉴于回转式包装机的的工作方式,预制袋的取袋动作过程为:(1)将预制袋叠放整齐,放在袋库中:(2)取袋机构将预制袋从袋库中取出并转移,完成取袋动作。[3]
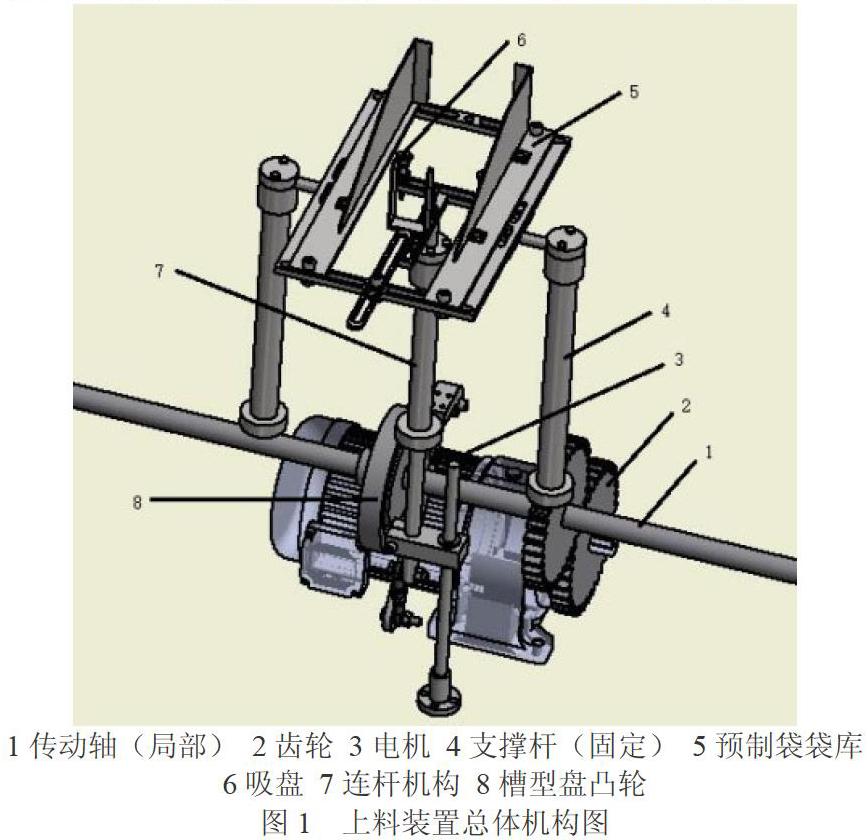
通过分析预制袋的取袋动作和包装机的结构要求。本装置选用盘形槽凸轮连杆机构来实现。[4]图1为取袋装置的结构图。
装置的工作原理,电机通过一对齿轮将运动传递到槽凸轮上,槽凸轮带动连杆机构运动,真空吸盘跟随连杆上下运动,真空吸盘与预制袋接触是吸住预制袋,成功吸住后连杆机构带动真空吸盘向下运动取出预制袋,完成取袋动作。
2 取袋機构设计
2.1吸盘选择
取袋机构利用真空吸盘吸住预制袋将其取出。对于柔性或三维规则物体,吸盘(图2)主要有平直型、平直带肋型、深凹型和风琴型4种类型。平直型多用于表面平整非变形物件,平直带肋形主要用于易变形物件,深凹型用于吸附面呈全面的物件,风琴型用于变形较大、柔性轻薄物件和吸附位置存在变化的场合。[5-7]预制袋柔软轻薄,故吸盘选用风琴型,综合考虑预制袋的几何尺寸和取袋的作业要求,选取的吸盘直径为20mm,吸盘安装长度为40mm。
2.2盘型槽凸轮设计
根据包装机参数每分钟装袋45袋,可以算出每个取袋周期为T=4/3s。由公式ω=,算出凸轮转动的角速度为ω=/2rad/s。根据包装机的结构选择摆动从动件盘型凸轮,凸机构的封闭方式采用形封闭,运动规律选择简谐运动。
分析取袋过程可知凸轮行程分4段:第一段吸盘接触预制袋并吸住预制袋,这段时间为t1=1/3s。第二段取出预制袋,预制袋随着吸盘向下运动到接袋位,这段时间t2=1/3s。第三段预制袋在接袋位停留等接袋机构取走预制袋,这段时间t3=1/3s。第四段真空吸盘上升回到原始位置完成一个取袋周期,这段时间为t4=1/3s。每个周期转动角度为Φ=ωt。
根据凸轮机构的安装位置和经验选择基圆半径Rb=50mm,从动轮半径Rr=10mm,由以上公式可求出凸轮的行程(图3)、压力角(图5)和曲率半径(图4)。可得出最大压力角аmax=19.29°,最小曲率半径ρtmin=-350mm。图7为凸轮轮廓图。[8]
2.3连杆机构设计
为了完成取袋动作预制袋从袋库到接袋位置的垂直距离为80mm,所以连杆机构的移动距离为80mm。图4为机构的结构图。根据机构图画出连杆机构计算简图(图5)。
凸轮带动连杆1运动,根据凸轮的参数可得出连杆1摆动的角度Φ=15.26?,连杆2选用两个端面球轴承NHS8T,故取l2 =79.4mm。根据包装机的结构取e=146.5mm。取l1=300mm可解的s1-s=80.093mm。满足预制袋移动距离的要求。
3结束语
通过槽型槽凸轮机构和连杆机构的组合,让旋转运动转换为直线运动,能很好的完成连续取袋动作。该机构机构简单,空间尺寸小,和其它工位共用一根传动轴,与其它工位的同步性好,提高运行的稳定性。
参考文献
[1]陈营,陆佳平,李国华,钱建华.装袋机连续开袋机构设计(J).包装工程,2016,37(17):177-181.
[2]张竹青,陆佳平,陆新宇,等,实现旋轮线轨迹的取袋机构设计与参数分析(J),机械设计,2015,32(3):82-85.
[3]陈营,陆佳平,李国华,钱建华.连续取袋接袋机构设计(J).包装与食品机械,2016,3:33-37.
[4]NEIL S,Mechanisms and Mechanical Devices Sourcebook Fifth Edition(M).Beijing:CHINA MACHINE PRESS,2014.
[5]辜松,张青,李恺,等,盆花包装机开袋机构设计与实验(J),农业工程学报,2014,30(24):38-46.
[6]李雪梅,曾德怀,丁峰,真空吸盘的设计与应用(J),液压与气动,2004(3):48-49.
[7]余翠兰,余俞,梁其诚,等,一种利用负压吸动效应的动态配气方法(J),真空科学与技术学报,2014,34(1):1-4.
[8]闻邦椿,机械设计手册(M),北京:机械工业出版社,2010.
