含发电速率约束的三区域互联电力系统自抗扰控制
2020-11-19陈增强郑月敏孙明玮孙青林
陈增强,郑月敏,孙明玮,孙青林
(1. 南开大学 人工智能学院,天津 300350; 2.天津市智能机器人重点实验室,天津 300350)
在电力系统中,保持频率稳定是使系统安全运行的重要因素。电力系统不稳定不仅会影响用户用电,损害系统设备,甚至会导致电网崩溃,从而引起大面积停电,对社会造成巨大损失。因此,我国电力系统规定,电力系统在正常运行条件下频率偏差限制为±0.2 Hz,当系统容量较小时,偏差限制可以放宽到±0.5Hz[1]。为了避免不必要的损失,越来越多的学者投入负荷频率控制(load frequency control, LFC)系统中,目的是使得频率偏移在上述允许的范围内,并使得区域间联络线功率维持在计划值。在实际系统中,为了避免温度、压力等因素发生过大变化需要对发电机的发电速率进行约束,也就是所谓的发电速率约束(generation rate constraints, GRC)[2]。但是GRC在保证系统安全的同时,会为系统带来非线性影响,甚至导致系统不稳定。文献[3]提出了一种带GRC的LFC扩展积分控制方案,相比传统的比例积分控制,系统性能有了一定的提高,但频率偏差不能很好地满足文献[1]中的规定;文献[4]采用模糊控制器对一个两区域互联电力系统进行控制,但在考虑GRC时,系统调节时间慢,并且存在一定的抖振。文献[5]提出了一种二型模糊控制器,并应用到一个含有GRC的两区域电力系统中,但结构相对复杂,难以在工业上广泛应用;文献[6]采用优化预测控制算法,可以有效实现对系统的控制,但控制器依赖系统模型参数,在实际中也很难实现。而线性自抗扰控制器自出现以来,就获得了许多研究学者的青睐,并在诸如飞行器[7-8]、船舶[9]等应用领域显示出了非常不错的效果。本文受文献[10]中Anti-GRC中补偿信号的启发,对线性自抗扰系统进行改进,在不添加参数的情况下减小GRC对系统的非线性影响。实验表明,对一个三区域LFC系统,上述思想可以取得良好的效果。
1 负荷频率控制系统模型
单区域电力系统模型图如图1所示。图1中,R为调速器的调差系数,Tg为调速器时间常数,Tt为原动机的时间常数,Kp与Tp分别为发电机的比例增益与时间常数。
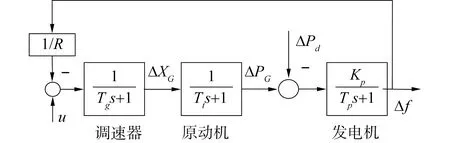
图1 单区域电力系统模型Fig.1 Model of single-area power system
电力系统的自动频率调节系统会按照一定的调节标准发出指令信号给调频器,调频器作用于调速器,使得调速器的气阀位置改变ΔXG;常见的原动机有汽轮机、水轮机等,以非再热汽轮机为例,调速器气阀位置的改变会使得汽轮机的输出功率产生ΔPG的变化量,此外,系统会受到ΔPd的负荷扰动,进而引起系统频率变化Δf[11]。系统控制目标是添加控制器使得扰动ΔPd对Δf的影响最小。
然而在实际系统中,为了保证设备安全运行,需要给发电功率的变化施加一个上限,也就是所说的GRC,如图2所示。本文中发电速率约束为给定值3%。

图2 带GRC的再热汽轮机系统Fig.2 Reheat turbine system with GRC
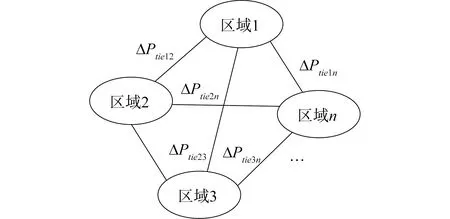
图3 多区域互联电力系统Fig.3 Multi-area interconnected power system
2 线性自抗扰控制
自抗扰控制(active disturbance rejection control, ADRC)是由韩京清教授[12]提出来的一种控制方法,基本思想是将系统未建模的内部扰动和未知的外部扰动视为总扰动,并通过扩张状态观测器(extended state observer, ESO)和非线性误差反馈控制率(nonlinear state error feedback, NLSEF)进行估计和补偿,以减小扰动对系统的影响,其只需要知道系统的输入输出通道信息和模型相对阶次,几乎完全不依赖对象模型。韩京清教授提出的是非线性ADRC,可以适应各种非线性系统,但是需要调节的参数多,不利于实际应用。因此,以克利夫兰州立大学高志强教授等的研究,将非线性ADRC简化成LADRC,并将参数减少到3个,这一成果,吸引了大批学者与工程人员投身研究,进而推动了ADRC的发展。
2.1 LADRC结构
LADRC的基本思想是,利用扩张状态观测器估计未知扰动,并将其参数与观测器带宽相结合,再利用一个PD控制组合将参数与控制器带宽相联系[13]。以二阶系统为例,其基本结构如图4所示。
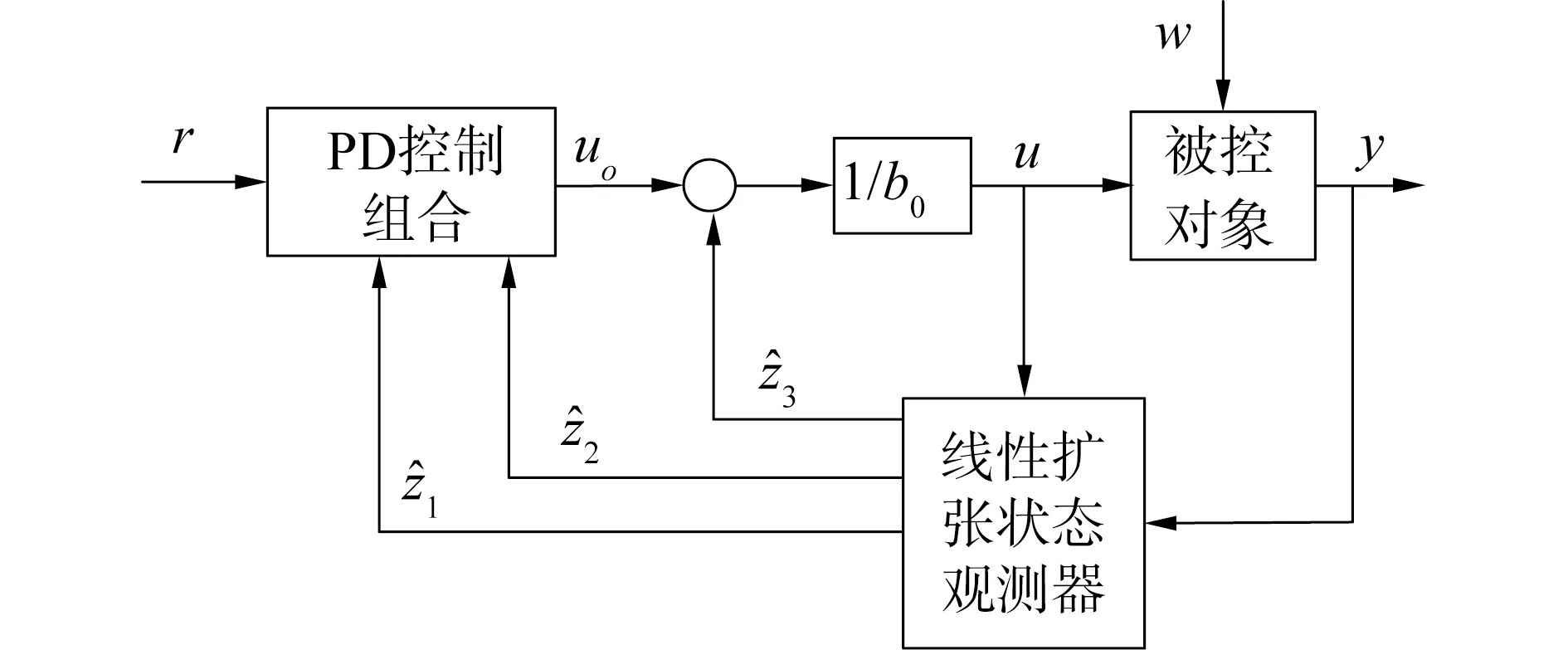
图4 LADRC结构Fig.4 Structure diagram of LADRC
假设被控对象为:

(1)
式中:y、u、w分别是系统的输出、输入与扰动;b中包含部分已知信息b0;r为设定值,即:
f+b0u
(2)
f为包含系统未知动态与外部扰动的总扰动。
选取状态变量:
(3)
式中:z3是由总扰动扩张出来的系统新状态变量,那么式(1)可以转换成状态空间描述:
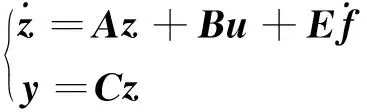
(4)

扩张状态后,为该系统设计全阶状态观测器:

(5)
式中:L为观测器误差反馈增益,整理可以得到:
(6)
(7)
将式(7)代入式(2),得:
(8)
(9)
利用PD控制组合来控制该系统:
(10)
式中kp、kd1、kd2是需要设计的一组控制器参数,记K=[kpkd1kd2]。
2.2 参数整定简化
上述过程可以看出,整个LADRC控制器需要设定2组参数,扩张状态观测器的误差反馈增益L以及PD控制组合的控制参数,高博士团队将这2组参数简化成2个参数的整定[14]。
对于式(6),将其特征方程的极点放在观测器带宽-ωo上,即:
|sI-(A-LC)|=(s+ωo)3
(11)
此时,扩张状态观测器的增益矩阵为:
(12)
(13)
类似地,将式(13)特征方程的极点放在控制器带宽-ωc处:
|sI-(A-BK)|=s(s+ωc)3
(14)
经过以上参数简化过程之后,可以看出,LADRC需要整定的参数为观测器带宽ωo与控制器带宽ωc上。在参数整定过程中,也可以适当调整b0。
3 基于LADRC的负荷频率控制
3.1 仿真模型
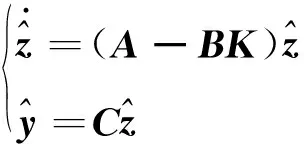
考虑如图5所示的三区域互联电力系统模型[15],其参数如表1所示。对于多区域电力系统,负荷频率控制不仅需要将频率偏移限制在一定范围内,最终稳定到其标称值,而且需要将联络线上的交换功率同样控制在计划值。因而多区域电力系统LFC区域i的控制目标通常为:
ACEi=ΔPtiei+BiΔfi=0
(15)
式中ACEi(area control error)为区域控制误差,ΔPtiei为区域间联络线交换功率。这种控制方式主要体现的是功率就地平衡的调频原则[16],在参数恰当的情况下,每个区域的控制可以做到只响应本区域的扰动,避免了远距离传输负荷,实现了本区域发电-负荷的就地平衡。
目前对于多区域电力系统的LFC通常利用分散控制,其主要思想是首先忽略联络线上的交换功率,再对每个区域分别设计控制器。对于图5中的模型,其每个区域的被控对象都是一样的,因此3个区域的控制器参数可以一致设计。
3.2 线性自抗扰控制器设计
图5中,每个区域的开环传递函数为:
(16)
因此每个区域LADRC的阶数为3,即4阶LESO,假设系统输出ACE是可以测量并且可信的,则可以设计降阶扩张状态观测器,原扩张状态观测器其余状态仍然利用PD控制组合进行控制器的设计。
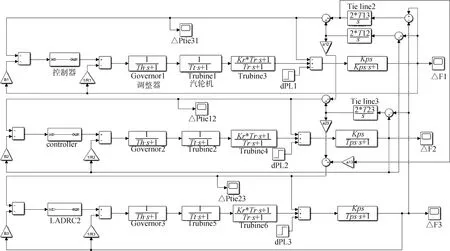
图5 三区域互联电力系统LFCFig.5 Load frequency control of three-area interconnected power system

表1 三区域互联电力系统模型参数Table 1 Model parameters of three interconnected power systems
3.3 改进的含GRC电力系统线性自抗扰控制器
为了减小GRC对系统带来的不良影响,本文对系统进行了改进,受文献[4]中补偿信号的启发,对系统结构进行图6所示改动。
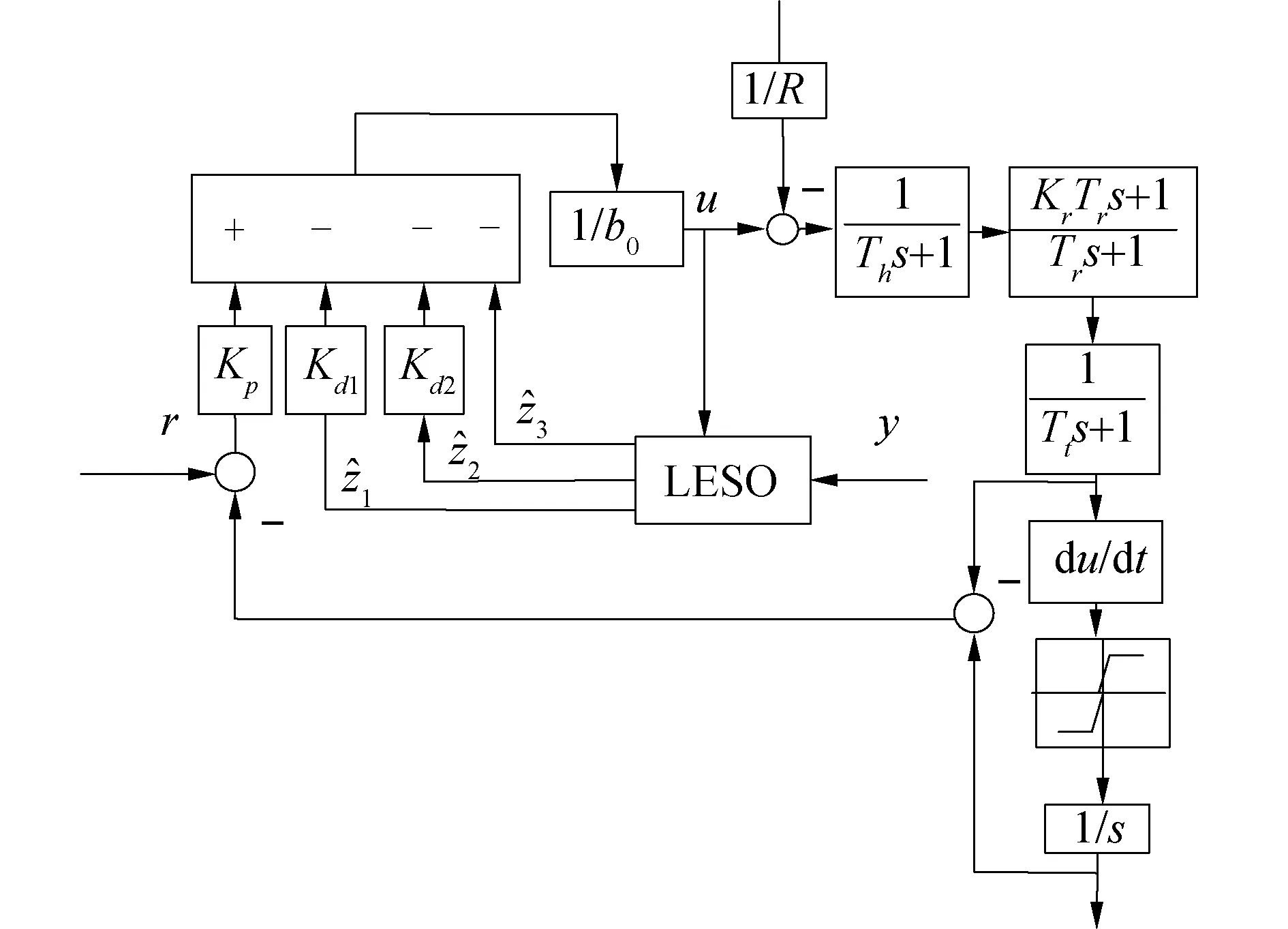
图6 改进的降阶LADRC结构图Fig.6 Structure diagram of improved reduced-order LADRC
可以看到,图6将理想的不含GRC与经GRC影响的汽轮机输出之差反馈到PD控制组合中,理想的期望误差为0,对于PD控制器,同样可以利用控制器带宽ωc来进行控制,即:
(17)
4 仿真结果
在确定好线性自抗扰控制器的阶数之后,利用Matlab 2018a的Simulink对系统进行了仿真实验。
4.1 GRC对负荷频率控制的影响
首先以图5所示的模型中第1个区域在t=0时加入0.01的阶跃扰动为例,即令ΔPL1=0.01,加入线性自抗扰控制器;再在图5中加入图2所示的GRC,同样在第1个区域加0.01的扰动,2种结果对比如下。LADRC的参数分别选取为:
GRC:ωo=3,ωc=10,b0=15
无GRC:ωo=2.2,ωc=10,b0=12
图7~9可以看出,LADRC能够对三区域互联负荷频率系统进行控制,但是系统加上发电速率约束之后,区域频率偏差相对变大,调节时间也变慢,如果发电速率约束继续减小,就很难对系统进行有效控制,因此,GRC对系统的影响是不能够忽略的。
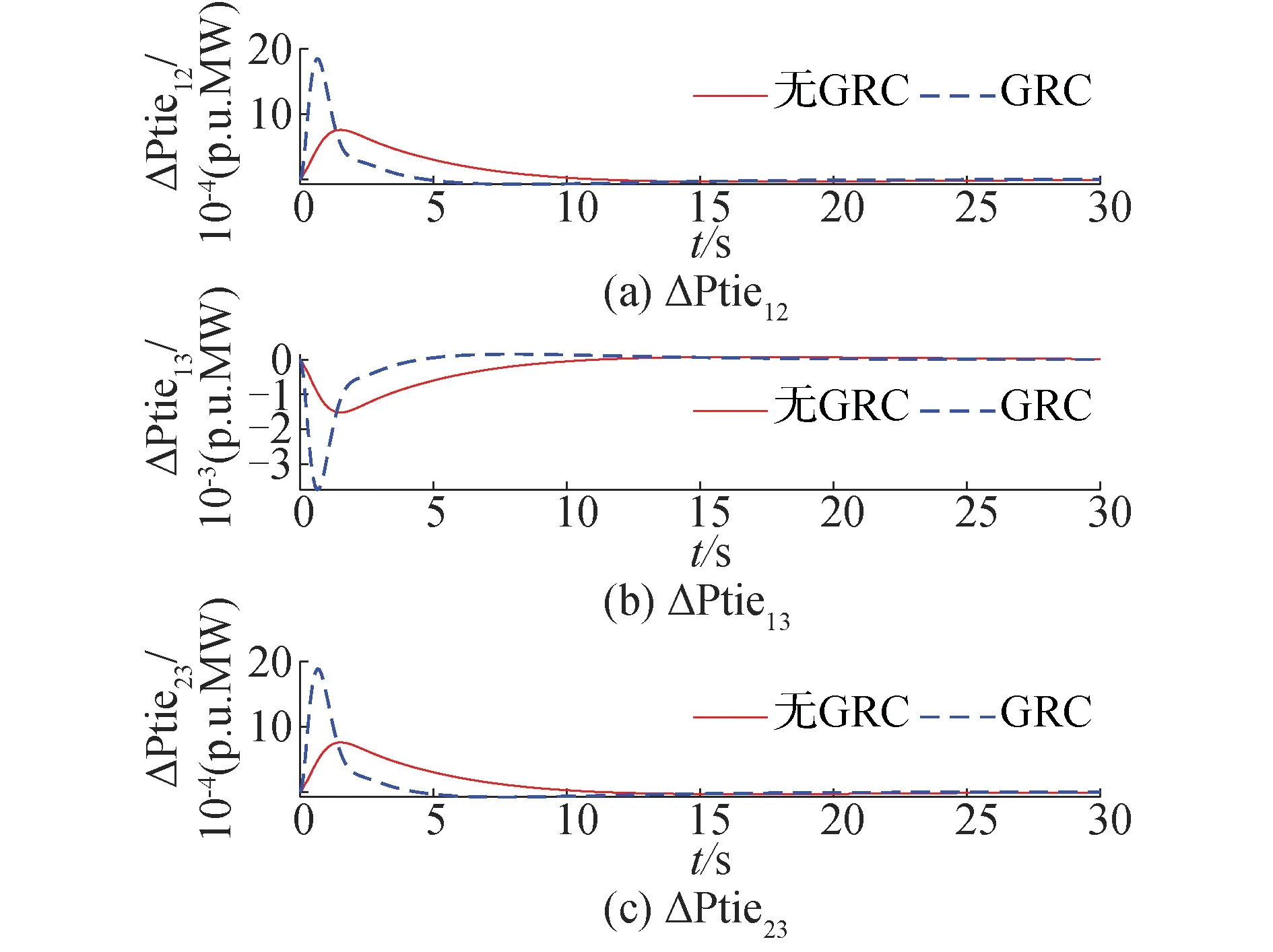
图8 含GRC与不含GRC的联络线功率偏差对比Fig.8 Comparison of tie-line exchanged power in GRC and without-GRC
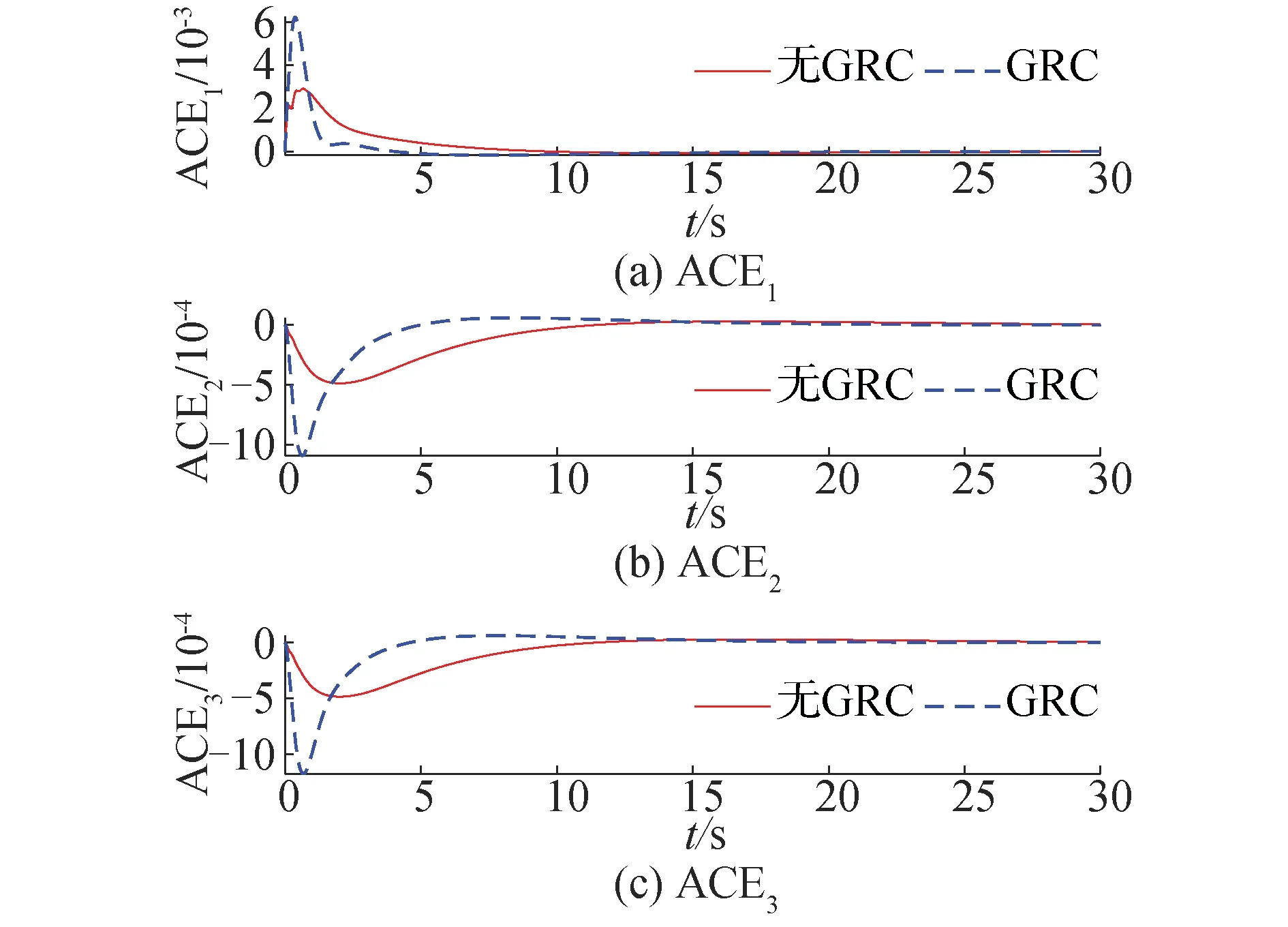
图9 含GRC与不含GRC的区域控制误差对比Fig.9 Comparison of ACE in GRC and without-GRC
4.2 改进的含GRC的LFC系统
针对加GRC的三区域电力系统,分别利用LADRC、Anti-GRC以及图6所示控制器进行仿真实验,控制器参数及结果如下所示。
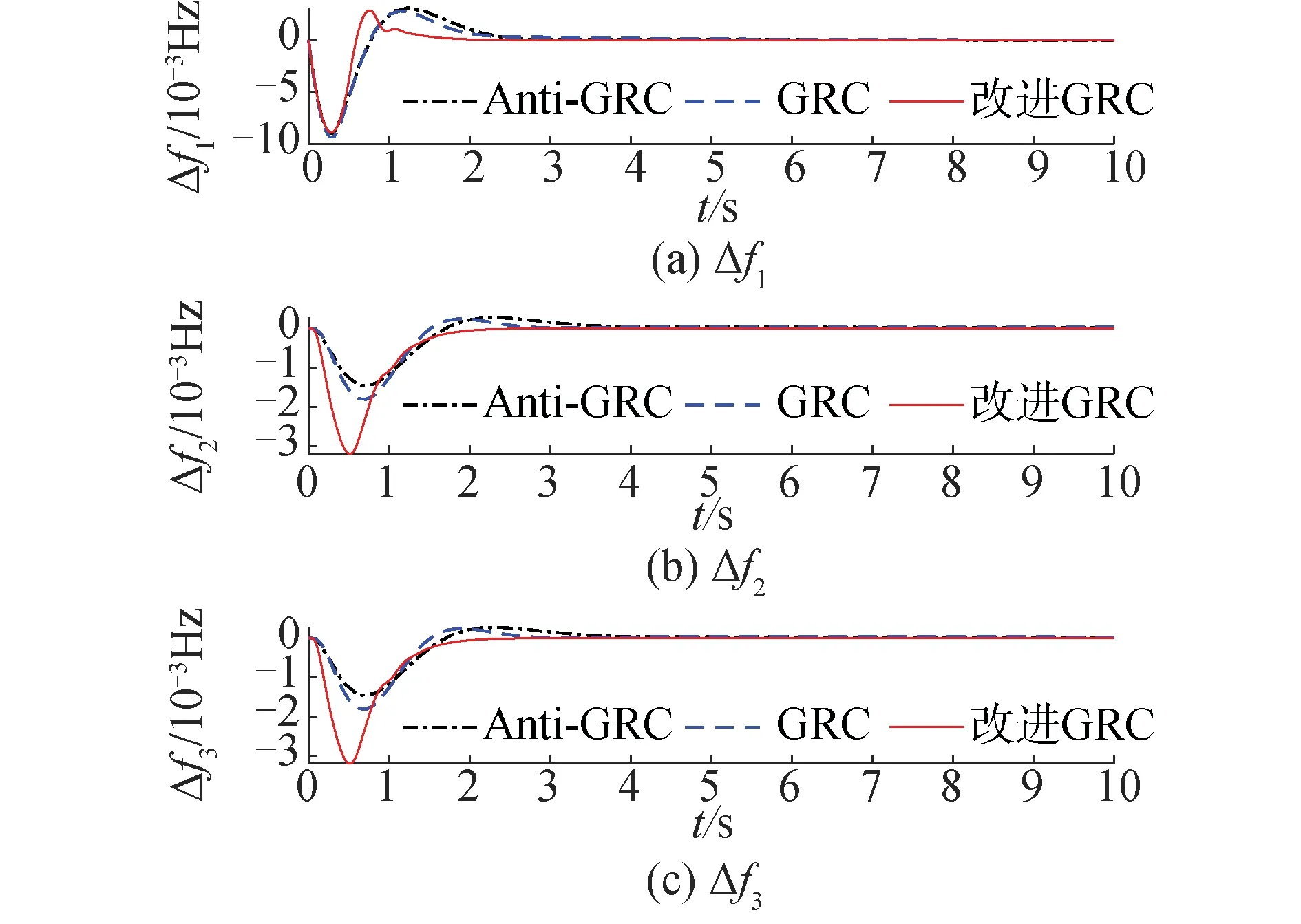
图10 ΔPL1=0.01时频率偏差控制效果对比Fig.10 Comparison of frequency deviation control effect for ΔPL1=0.01
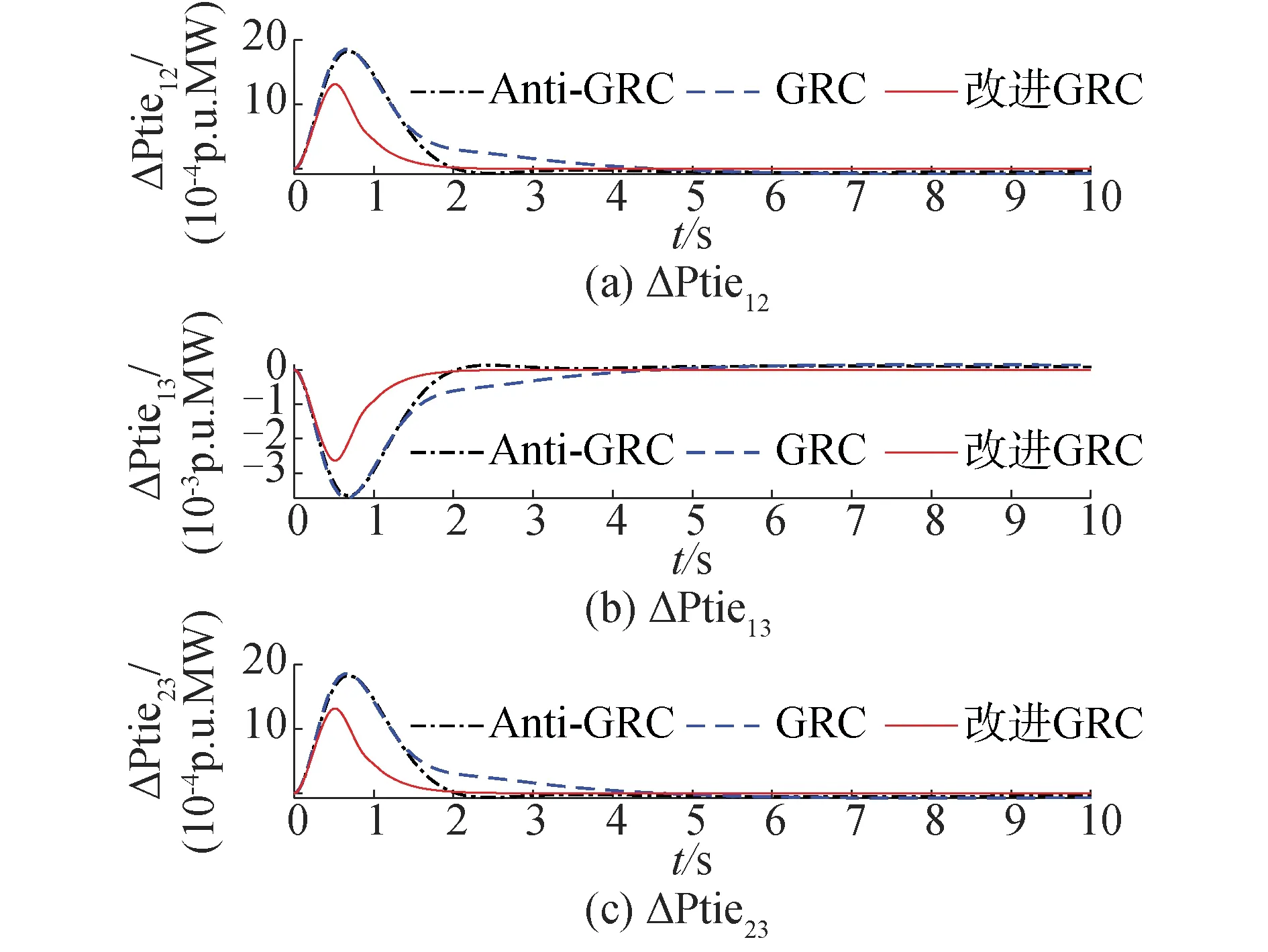
图11 ΔPL1=0.01时联络线功率偏差控制效果对比Fig.11 Comparison of tie-line exchanged power control effect for ΔPL1=0.01
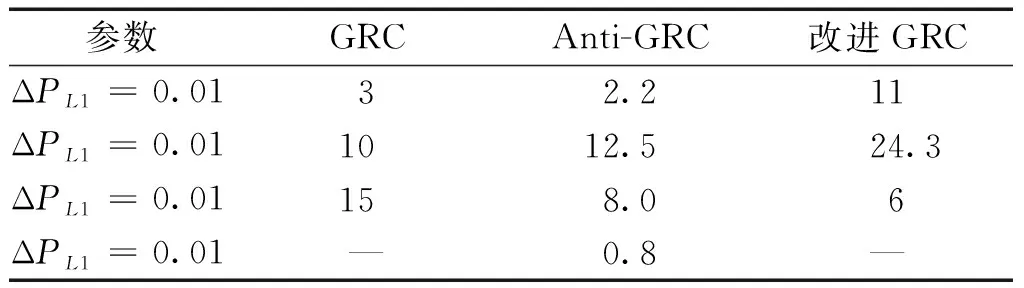
表2 自抗扰控制器参数Table 2 Parameters of ADRC
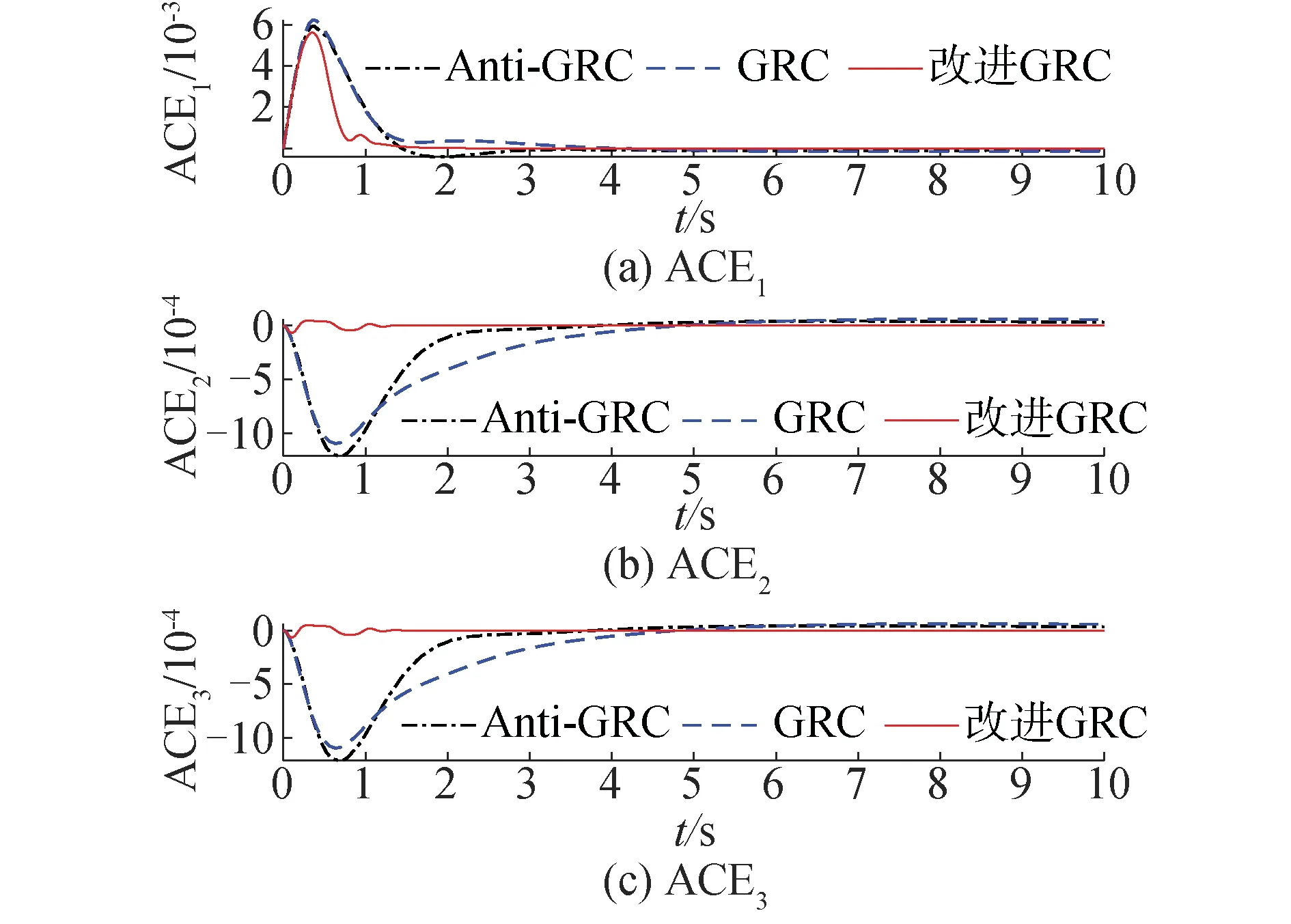
图12 ±0.005%时ACE控制效果对比Fig.12 Comparison of ACE control effect for ±0.005%
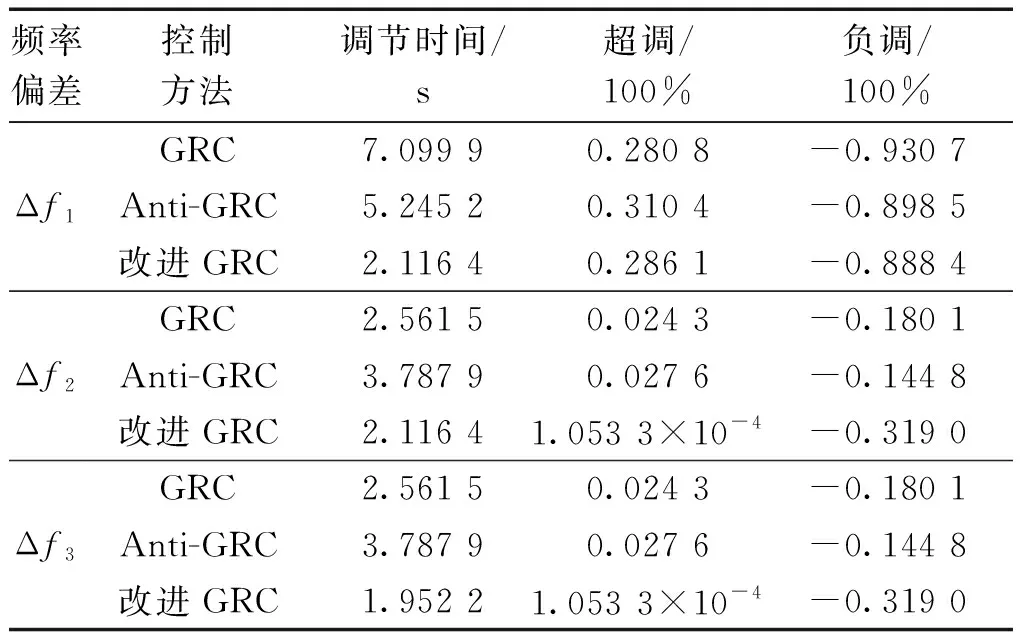
表3 频率偏差控制动态性能指标对比
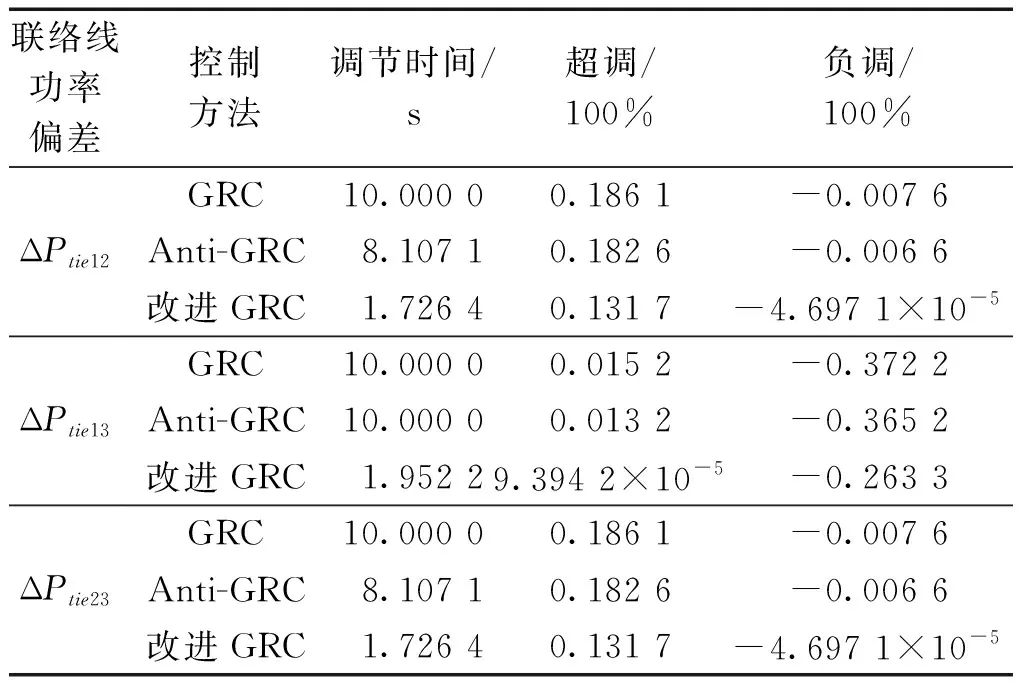
表4 联络线功率控制动态性能指标对比
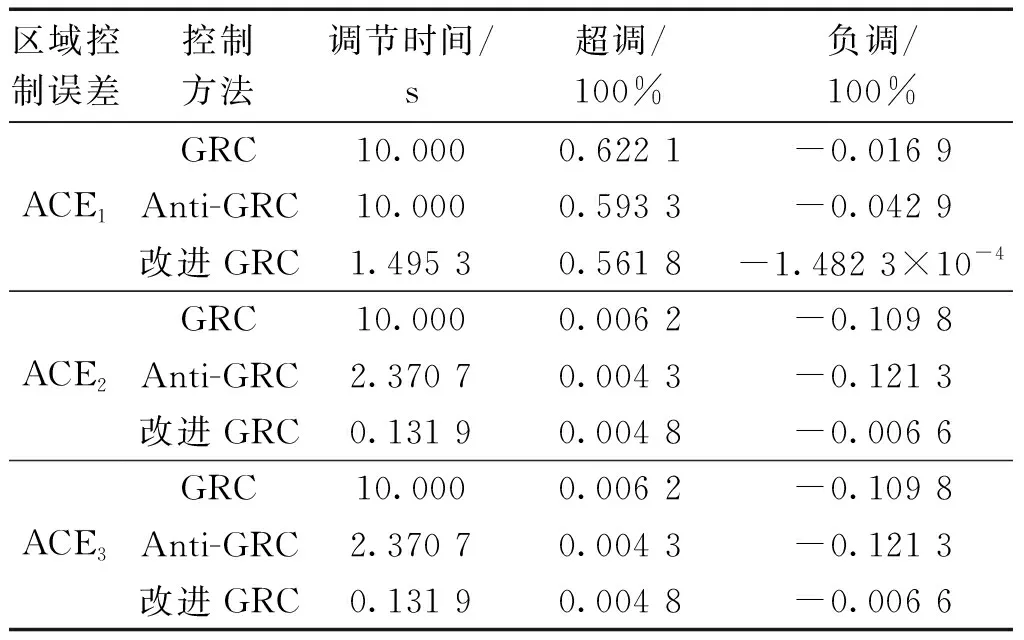
表5 区域误差控制动态性能指标对比
可以看出,Anti-GRC以及改进的系统与之前系统相比,调节时间均变小了,系统响应也更平稳,但是改进的系统与之相比,所调参数更少,在调节时间与超调上存在一定的优势。
4.3 鲁棒性分析
为了验证改进后系统的鲁棒性,假设参数Th、Th、Th分别改变其标称值的Th,图13是改变后系统的响应曲线。
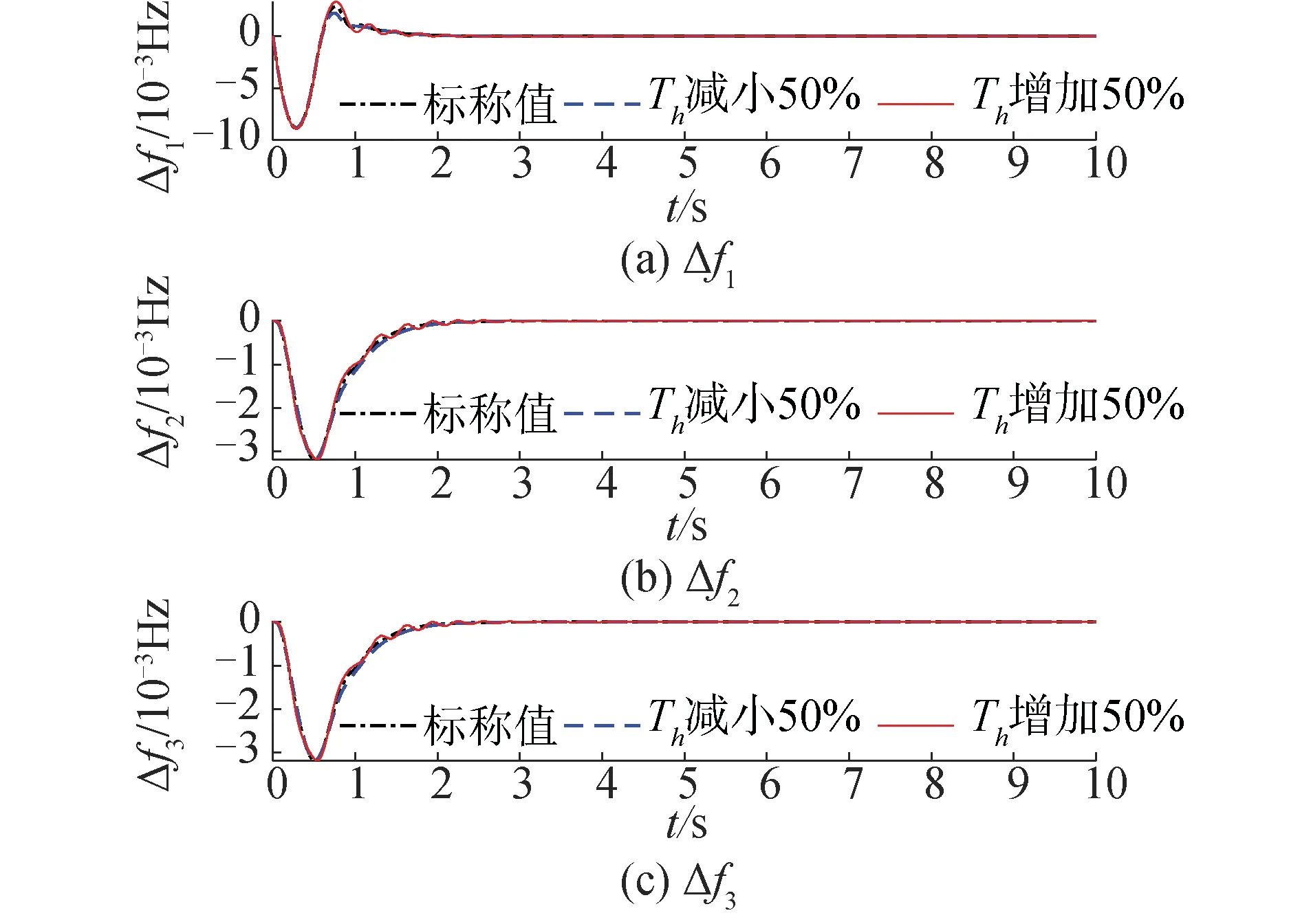
图13 Th改变后系统频率偏差控制效果Fig.13 The obtained frequency deviation response in case of changing Th
图13~18分别是改变参数之后,系统的区域频率偏差响应以及区域控制误差响应,可以看出,在系统参数Th、Tt、Tps分别改变±50%后,系统仍能够达到稳定状态。说明改进的控制器在系统参数摄动50%时有很好的鲁棒性。
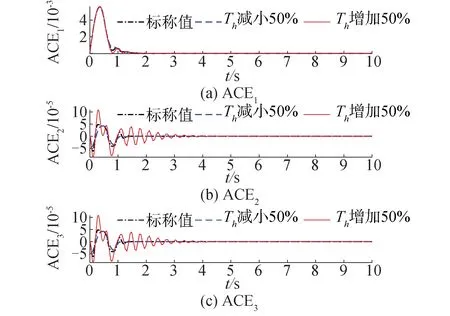
图14 改变Th时区域控制误差响应Fig.14 The obtained ACE response in case of changing Th
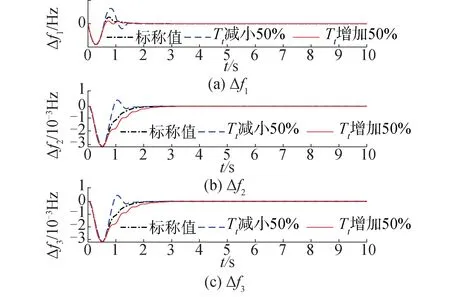
图15 改变Th时频率偏差响应Fig.15 The obtained frequency deviation response in case of changing Th
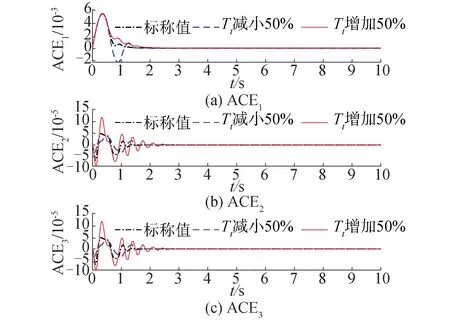
图16 改变Th时区域控制误差响应Fig.16 The obtained ACE response in case of changing Th
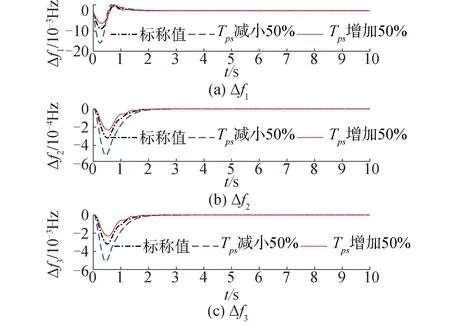
图17 改变Th时频率偏差响应Fig.17 The obtained frequency deviation response in case of changing Th

图18 改变Th时区域控制误差响应Fig.18 The ACE response in case of changing Th
5 结论
1)由于系统中的输出可以直接获得,因此对线性扩张状态器进行了降阶处理。
2)仿真表明GRC的存在会对系统响应造成不良影响,因此,本文将含有GRC的汽轮机输出与理想地不含GRC的汽轮机输出误差反馈到PD控制组合中,并通过仿真结果图与动态性能指标值验证了所提改进方法的有效性。
3)利用系统参数摄动后的响应结果表明控制器具有不错的鲁棒性。
在电力系统中,水轮机具有非最小相位,相比含有汽轮机的系统更难控制,目前,LADRC在控制含有水轮机系统的互联电力系统方面仍达不到令人满意的效果,因此,未来将在这方面进行进一步的研究。
