单片机智能环保垃圾桶设计
2020-11-17卢睿洁周泊龙韩军良
卢睿洁 周泊龙 韩军良
【摘 要】为解决传统垃圾桶使用不便的问题,在人们丢弃垃圾时避免双手被污染和双手占用问题,论文介绍了一种基于STC89C52单片机控制的智能环保垃圾桶,其可以实现自动感应测距。使用时,其既可自动开盖,延时自动关盖,也可手动控制,按键开盖。其设有满溢指示灯,在垃圾量达到满溢标准时,提示使用者及时清理垃圾。垃圾桶选用伸缩式步进电机作为动力源,利用L298N电机驱动模块驅动,由STC单片机控制程序,在需要使用时驱动电机,通过输出轴输出推力,推动杠杆实现自动开关盖。
【Abstract】In order to solve the problem of inconvenient use of traditional trash can, to avoid the problems of contamination of hands and occupation of hands when people discard trash, this paper introduces an intelligent environmental protection trash can based on STC89C52 single chip microcomputer control, which can realize automatic induction distance measurement. When in use, it can open the cover automatically, close the cover automatically after delay, or manually control to open the cover by pressing the key. It is equipped with spill-over indicator light to prompt the user to clean up the trash in time when the amount of trash reaches the spill-over standard. The telescopic stepper motor is used as the power source for the trash can. The L298N motor driver module is used to drive the trash can. The STC single chip microcomputer controls the program to drive the motor when it is needed. The thrust is output through the output shaft, and the lever is pushed to realize the automatic opening and closing of the cover.
【关键词】单片机;满溢提醒;自动开盖
【Keywords】single chip microcomputer; spill-over prompt; automatic cover opening
【中图分类号】TB472;TP368.1 【文献标志码】A 【文章编号】1673-1069(2020)10-0184-02
1 桶身结构
本次设计的智能垃圾桶主要由四部分组成,包括操作面板、桶体、底和桶盖四大结构,每个结构包含若干零件。电路控制部件主要由操作面板、电机控制电路、电源电路、单片机电路和传感器电路组成,主要在人接触垃圾桶时,单片机完成对电机的控制并实现开盖动作和对垃圾桶内垃圾位置高度的监控,并在达到一定高度时进行溢出告警的功能。底面安装板上安装的是控制系统的主要部分,包括单片机最小系统板、振动传感器、电机驱动电路、伸缩式步进电机。
2 电气系统
2.1 电路结构
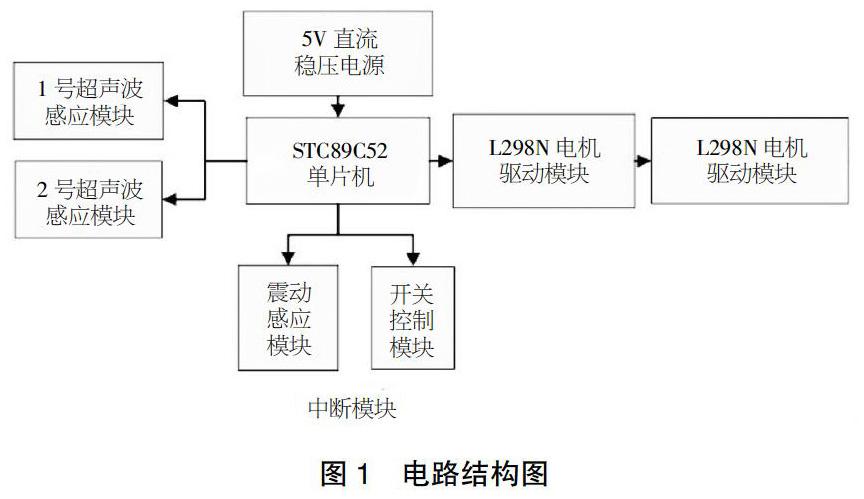
电气系统的各部分结构以及基本连接关系如图1所示。
2.2 控制系统原理
电气系统由电源电路、STC89C52单片机电路、手动开关、驱动电路、伸缩式步进电机、LED显示灯、振动传感模块、测距模块、蜂鸣器等部分组成。
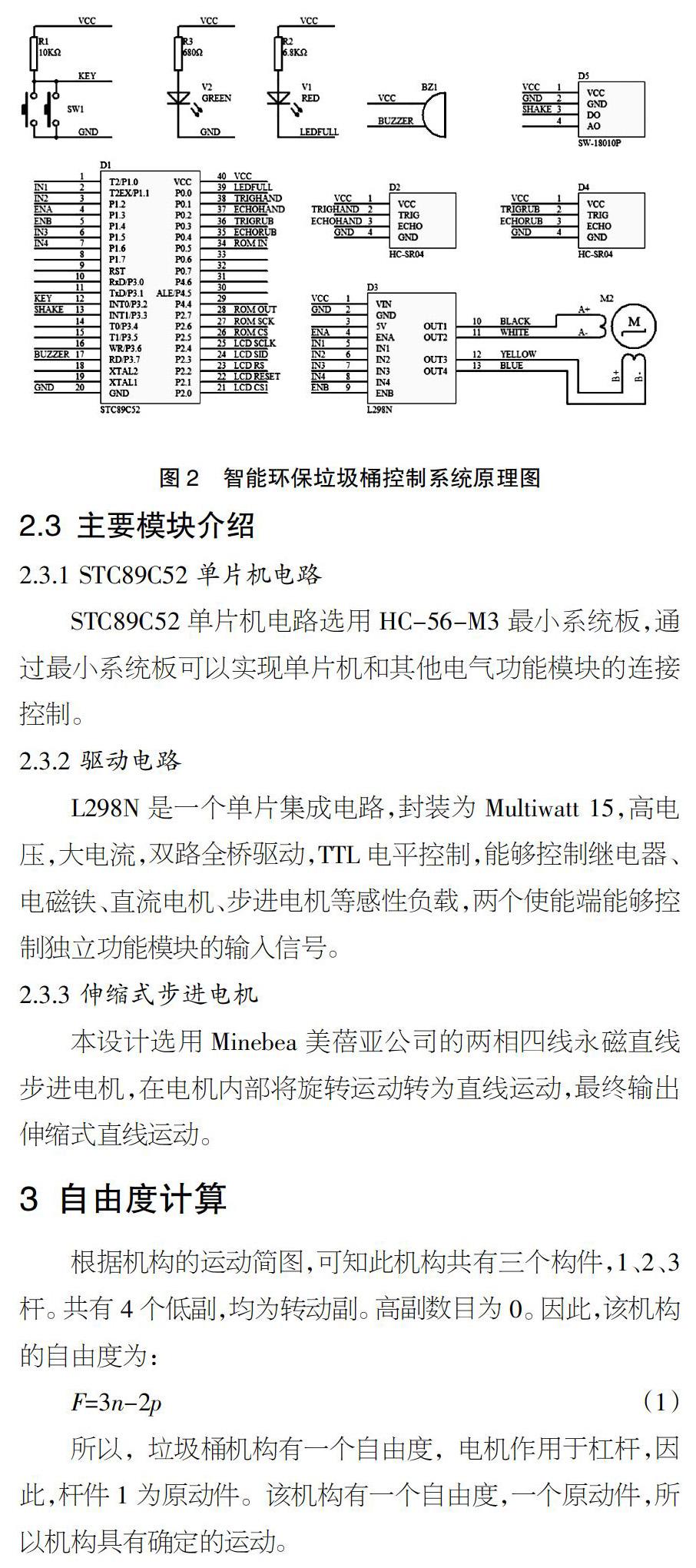
以上各个模块的原理图以及连接关系如图2所示。
2.3 主要模块介绍
2.3.1 STC89C52单片机电路
STC89C52单片机电路选用HC-56-M3最小系统板,通过最小系统板可以实现单片机和其他电气功能模块的连接控制。
2.3.2 驱动电路
L298N是一个单片集成电路,封装为Multiwatt 15,高电压,大电流,双路全桥驱动,TTL电平控制,能够控制继电器、电磁铁、直流电机、步进电机等感性负载,两个使能端能够控制独立功能模块的输入信号。
2.3.3 伸缩式步进电机
本设计选用Minebea美蓓亚公司的两相四线永磁直线步进电机,在电机内部将旋转运动转为直线运动,最终输出伸缩式直线运动。
3 自由度计算
根据机构的运动简图,可知此机构共有三个构件,1、2、3杆。共有4个低副,均为转动副。高副数目为0。因此,该机构的自由度为:
F=3n-2p (1)
所以,垃圾桶机构有一个自由度,电机作用于杠杆,因此,杆件1为原动件。该机构有一个自由度,一个原动件,所以机构具有确定的运动。
4 功能介绍
4.1 来人开盖
当手或者其他障碍物与垃圾桶盖顶部的距离小于30cm时,垃圾桶盖自动开启。当人手完成扔垃圾动作离开后,延时5s,垃圾桶盖会自动关闭。开盖功能触发时,蜂鸣器会响一声,提示成功触发开盖。
4.2 踢动开盖
使用腿、脚、膝盖等部位轻轻踢动垃圾桶身,垃圾桶盖自动打开。完成扔垃圾动作5s之后,垃圾桶盖自动关闭。开盖功能触发时,蜂鸣器将连响三声,提示成功触发振动感应开盖。
4.3 手动开盖
垃圾桶盖上的按钮主要用于手动开盖,绿色指示灯亮起时,只要按下开关,垃圾桶盖就会打开,再次按下开关,垃圾桶盖关闭。
5 程序设计
程序设计的总体思路如下:
①接通电源,工作灯(绿色LED指示灯)亮起。
②打开1号超声波测距模块,持续测距。
③判断1号超声波传感器距离是否小于开盖距离30cm。如果小于则完成开盖过程后继续;如果大于则继续。
④判断按键是否按下。按下时开盖,等待按键再次按下时关闭;未检测到按键则继续。
⑤判断是否有振动。有振动时完成开盖;无振动则继续。
⑥2号超声波测距。距离小于5cm时红色LED灯亮;距离大于5cm时继续。
⑦结束。
6 结语
综上所述,垃圾桶设计圆满完成。本论文的思路主要源于垃圾桶的日常使用中存在的不便,在了解和掌握一定机械原理和控制原理的基础上,对自动控制的智能环保垃圾桶进行设计和制作。通过查阅文献,参考已有的智能垃圾桶制作成品,对最实用的功能加以总结,在本文所设计的产品中体现出来。
【参考文献】
【1】熊良山.机械制造工艺基础(第3版)[M].武汉:华中科技大学出版社,2012.
【2】许立忠,周玉林.机械设计[M].北京:中国标准出版社,2009.
【3】白桂峰.基于STC89C52的家用智能垃圾桶设计[J].自动化与仪表,2019,34(03):97-100.
【4】張毅刚,牛夏牧,李春明.单片微机原理与应用[M].西安:西安电子科技大学出版社,1994.
【5】周丽荣.物联网电子产品中单片机技术的应用研究[J].电子测试,2018(02):79-80.