室内混合智能定位系统仿真平台框架研究
2020-11-17蔚保国李雅宁王永杰
蔚保国,李雅宁,王永杰
(1.卫星导航系统与装备技术国家重点实验室,石家庄 050081; 2.中国电子科技集团公司第五十四研究所,石家庄 050081)
0 引言
人们目前对室内导航定位技术的需求日益显著,室内定位导航技术成为了近年来研究的重点和热点,室内智能定位系统在未来的生产生活中必将扮演重要的角色。然而由于实验场地和仪器设备的限制,在研究阶段不可能对提出的原理系统逐一进行测试验证,可用于小规模实测鉴定的评估样本也很少,所以室内定位系统应采用更为系统化的设计方法,即先建立虚拟原型,仿真测试验证后再开发物理原型。同时,被仿真系统的规模和结构日益扩大和复杂,迫切需要具有分布、异构、协同、互操作、重用等性能的新型建模仿真系统,能够通过网络随时随地无障碍地获取所需的仿真服务。
根据上述需求,国内外学者采取了不同的方法和手段设计导航、通信类的仿真平台,以支撑特定技术的研究和论证。文献[1]为了研究新的信息移动场景中的电信系统行为,构建了综合考虑现实道路交通移动性和电信网络协议的仿真平台体系结构;文献[2]描述了低地球轨道(Low Earth Orbit,LEO)航天器全球定位系统(Global Positioning System,GPS)观测的仿真模型,设计了验证航天器编队飞行任务的相对位置确定算法的仿真平台;文献[3]提出了一种将真实世界中已记录的运动轮廓传输到模拟环境中的方法,为开发手持导航系统的视觉惯性测距法特别设计了相关的模块化仿真框架;文献[4]提出了卫星移动通信系统级仿真平台架构,对卫星、终端、信关站等核心通信节点进行建模,并研究了仿真平台的工作流程。上述研究主要针对室外导航通信或特定导航技术,所设计仿真平台往往只能适用于某一种网络架构和技术体制,少有针对室内定位分析研究的综合仿真平台。
本仿真平台以云计算平台为基础,为室内多源定位系统提供建模和仿真环境,从定位基站布设、无线信号多径传输、定位基站信号兼容性、多源定位精度仿真以及定位数据质量评估等方面对室内定位系统进行建模和仿真。一方面解决了室内定位技术研究的综合仿真问题,提供仿真工具箱,加快室内外无缝定位技术发展,为无人化设备的全源定位技术发展提供仿真条件;另一方面为室内外定位系统推广部署提供仿真平台,仿真机场、商场、体育场馆等各场景下的室内定位精度和定位基础设施部署,推进室内定位应用。
1 室内混合智能定位仿真平台框架
1.1 室内混合智能定位系统内涵
目前,室内混合智能定位技术已成为国际导航与位置服务领域的研究热点。基于国家十三五重点研发计划“室内混合智能定位与室内GIS技术”项目研制的室内混合智能定位系统(图1),研究了室内复杂空间环境的导航信号作用机理、室内定位多源误差传递机制与混合智能定位理论、室内大规模人群时空行为模式及自适应位置服务机制等科学问题,以兼容北斗的无线基站网为主,室内局域定位网为辅,立足智能手机与位置服务后台的交互,实现了复杂室内环境下的广域连续覆盖、多源智能融合定位、普适低成本的北斗室内外无缝导航与位置服务。
1.2 室内混合智能定位系统仿真体系
由于室内环境的复杂多样性,在实际室内定位系统建设之前,有必要对其进行仿真设计和预测,同时对系统起到性能评估的作用。仿真平台框架如图2所示。
室内混合智能定位系统仿真平台具备通用化、开放性、可组合、可二次开发的特点。根据输入的地理信息文件,仿真平台通过仿真导航源网络的信号体制和部署方案、基站信号在室内空间下的传播效应和误差传递机理,以及基于环境特征库建立的“云+端”协同定位模式,建立了完整的实际系统的镜像模拟,帮助实现系统设计方案的评估和调整。
(1)体系结构
室内混合智能定位系统仿真平台体系结构可分为五大模块,分别为导航源网络模块、信号传播模块、特征库建立与更新模块、“云+端”协同定位模块和通信模块,如图3所示。

图1 室内混合智能定位系统构成Fig.1 Composition of indoor hybrid intelligent positioning system

图2 仿真平台体系框架Fig.2 Simulation platform architecture

图3 室内混合智能定位仿真平台体系结构Fig.3 Architecture of indoor hybrid intelligent positioning simulation platform
其中,导航源网络模块包括Wi-Fi/蓝牙无线信号基站部署优化仿真子模块、地面基站室内外布网优化仿真子模块、室内定位信号干扰与兼容性分析仿真子模块;信号传播模块包括室内多径仿真子模块、室内射频多径分析及定位仿真子模块;特征库建立与更新模块包括信号指纹库、视觉地标库、电磁图谱的建立与更新;“云+端”协同定位模块包括测量数据质量分析仿真子模块、自主完好性监测子模块、混合定位子模块;通信模块包括终端位置信息上报模块和云端位置服务推送模块。平台具体功能如下:
1)仿真场景管理
仿真环境参数设置,包括标记障碍物、部署环境中已有的WiFi和蓝牙、划定定位区域等。
2)地图的读入与识别
室内外地理信息系统(Geographic Information System, GIS)数据读入,显示室内外地形、布局及边界范围,并且能够识别和选取平面图中的图形元素,用于优化设计及地图显示。
3)定位基站信号仿真
能够复现卫星信号和仿真基站信号,对于基站信号,可以控制信号功率大小、信号个数及调制方式。
4)基站部署优化
具备复杂环境下的地面基站网络部署、信号服务区域、定位精度等分析功能,建立基站部署优化模型,按照精度最优化模型提供最优化部署方案,预报理论定位精度的最佳区域。
5)室内多径仿真
能够根据不同的场景数据,精确仿真出复杂环境,计算出收发机之间无线传播损耗、多径到达路径/时间/角度,可配置多种传播模型、天线模型、材料的反射系数和透射系数等参数,并根据输出的数据,完成简单的多径数据分析。
6)兼容性分析
分析基站信号对卫星导航接收机捕获、跟踪与测量性能的影响,分析与现存通信信号的兼容性。
7)环境特征库构建
利用已有的稀疏指纹库数据,通过插值算法生成稠密指纹库。
8)定位性能分析
提供不同定位基站部署方案下的定位误差评估功能,显示基站可用性、服务区信号强度分布,以及信号连续性。
(2)系统层次结构
系统层次结构分为五层,从用户端到底层硬件设施分别为工具层、应用服务层、资源层、平台管理层和云平台层,如图4所示。以下就各层的功能进行说明。

图4系统层次结构图Fig.4 System hierarchy diagram
工具层为顶层用户提供多种室内环境建模和仿真工具,包括场景构建、仿真控制、模型管理和态势显示等。
1)场景构建:实现建筑物设置、基于模型库创建实体、实体参数设置、基于地图的实体部署等操作,最后生成仿真场景文件;
2)仿真控制:包括运行模式设置、仿真时间查看、仿真启动/暂停/继续/终止、仿真节点状态监控等,并提供针对特定场景的仿真回放功能,选择指定的仿真数据进行回放,从而实现对仿真过程的复盘和分析;
3)模型管理:提供仿真资源管理人机交互界面,通过该工具实现对多层级仿真模型、仿真数据、设计文件、文档、数据类型、态势相关资源等的管理;
4)态势显示:提供基于地图的二维态势显示功能,通过图标、点线面等几何要素实时绘制的方式展现仿真系统当前态势情况,支持测距、测面积、轨迹绘制、地图缩放平移等功能。
应用服务层主要包括仿真引擎服务、场景构建服务、模型组合服务、态势显示服务、仿真控制服务和仿真回放服务等,该层中的服务需要依赖于资源层所提供的基础服务[5-6]。
资源层对应用服务和工具层所需要的资源进行管理,并提供资源访问服务。资源包括多层级仿真模型、仿真数据、仿真设计、文档、数据类型、地图资源以及与态势显示相关的资源。
平台管理层主要实现调度与编排、分布式协调、服务治理等功能。调度与编排提供了面向应用的容器集群部署和管理功能,解耦CPU、GPU、内存、网络以及存储等基础设施与应用程序之间的依赖。
云平台层为上述各层提供环境基础,该层以云平台IT基础设施以及相关的供应保障功能为主。从物理资源的角度上,该层提供包括服务器、存储、数据中心交换机、防火墙、VPN网关和路由器等硬件设施;从虚拟资源的角度上,云平台层包括了计算虚拟化、存储虚拟化和网络虚拟化3个部分[7-9]。
2 仿真平台支撑技术
2.1 抽象与描述方法
每个模型的规范设计,是所有模型能够联合仿真的前提条件。须制定标准化的规则及统一的接口规范才能使不同的系统模型能够正确交互,增强模型的互操作性、可重用性和可移植性[10]。
室内混合智能定位系统仿真平台采用的抽象与描述方法为:通用仿真模型接口规范设计封装在特定类中,所有仿真模型都继承该类,并实现其中的主要接口,包括数据输入输出、模型初始化、销毁等接口,采用通用仿真模型接口规范的仿真模型由仿真引擎进行调度。模型组件设计如图5所示。

图5 模型组件示意图Fig.5 Schematic of the model components
2.2 动态组合方法
模型动态组合是选择模型组件进行装配,以满足不同仿真需求的一种能力。对模型动态组合的关键技术进行研究,并提出了模型动态组合的实现方法,包括统一服务化模型接口规范设计、模型组合关系描述,以及仿真引擎对组合模型的调用、数据传输等,示例如图6所示。
模型信息描述文件描述了模型之间的组合关系和模型组件之间的参数对应关系。在仿真过程中,仿真引擎基于模型描述文件中的组合关系,执行解析、创建模型对象,初始化参数并传递仿真控制指令,驱动模型运行,实现组合模型内部各个组件之间的参数交互,以及组合模型与其他模型之间的数据交互,为模型提供运行调度、数据管理、数据交互等服务[11-13]。
2.3 异构模型重用架构技术
模型重用架构技术旨在充分利用已有的模型和仿真系统等仿真资源,快速搭建满足不同应用需求的仿真系统,在保持建模和仿真有效性的同时,减少模型冗余和数据冗余带来的困扰,如图7所示。

图6 组合模型示例Fig.6 Example of a combination model

图7 模型重用技术架构Fig.7 Model reuse architecture
从仿真运行的角度上,以非数据集成方式进行重用的模型,通过适配层封装的方式,将异构模型封装为满足统一服务化模型接口规范的标准模型,由仿真引擎服务进行调用;以数据集成方式进行重用的模型,则通过仿真引擎调度适配层模型和适配层模型访问解析数据文件来实现仿真交互。
模型重用架构采用基于Docker的微服务架构,通过Nginx实现反向代理,并在云操作系统的基础上,通过Kubernetes对容器进行编排和管理。模型重用架构中的各类仿真服务对应Kubernetes中的Service对象,每个具体的Service背后由分布在多个物理机上的进程实例来提供服务,这些进程实例在Kubernetes中被封装为一个个Pod。
3 仿真中的理论模型
3.1 基站部署仿真
室内混合智能定位网络采用北斗地面基站为主、室内无线网络基站为辅的定位模式。
地面基站网设计考虑了经济性和精度特性。通常,最少定位基站数应大于4。在满足经济性要求的前提下,达到定位精度最优。定位精度最优,表现为几何精度因子(Geometric Dilution Precision, GDOP)值最小。因此,布网最优化模型为
min(GDOP)
(1)
求解最优化模型,得到最佳的基站观测方位角和高度角条件为
(2)
无线网络优化部署算法采用克拉美罗下界(Cramer-Rao Lower Bound,CRLB)作为定位误差的度量标准,使用参考点处接收到的有效信号的WiFi和蓝牙数量作为覆盖度的度量标准,应用遗传算法快速搜索具有最小平均定位误差并满足预定覆盖要求的最佳WiFi和蓝牙部署方案,如图8所示。
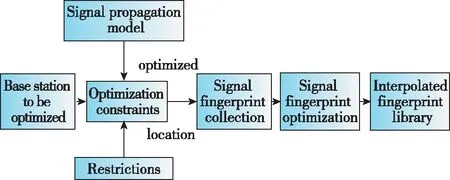
图8 无线网络基站优化及指纹库构建Fig.8 Wireless network base station optimization and fingerprint library construction
3.2 指纹库构建
通过已知信号点的信号强度预测未知点的信号强度,并形成相应的指纹库上传至MySQL数据库中进行使用。在信号指纹库插值算法上,首次提出了将萤火虫算法(Fireworks Algorithm,FWA)和高斯过程回归模型(Gaussian Process Regression,GPR)相结合形成FWA-GPR算法来推测未知点的信号强度,如图9所示。通过确定2个目标函数,一是概率最大;二是误差最小。同时通过随机赋予初值,使用萤火虫算法寻找到能够使得目标函数最优的参数(衰减因子等)。

图9 FWA-GPR算法流程Fig.9 FWA-GPR algorithm flow
3.3 多径传播仿真
多径传播采用射线追踪方法进行仿真,射线追踪法可以通过电磁理论计算出收发端之间所有路径的传播信息,从而分析出室内伪卫星信号的传播特性。
如图10所示,利用反射的对称性找出发射点的T的镜像点T1,以此类推,按此方法将所有障碍面的镜像点都通过对称法找出,相应得到全部的入射反射线,即可完全确定射线传播过程。
反射前的入射场强Ei(P)和反射后的反射场强Er(P),根据反射定律可表示为

(3)


图10 射线追踪算法Fig.10 Ray tracing algorithm
3.4 智能定位算法
以室内地面基站定位方式为主,辅以蓝牙/WiFi/MEMS等终端搭载的多传感器数据,针对不同示范场景在数据级或结果级进行融合,实现室内典型场景下的人/车/物的连续定位及跟踪。
室内挑高较高(一般超过5m),开阔空间下,如大型场馆、机场、会议厅等室内场景(场景1,见图11),选择以伪卫星地面基站为主的定位方案,通过高精度载波相位及多普勒数据实现亚米级的连续定位。

图11 场景1定位模型Fig.11 Scene 1 positioning model
针对室内环境较复杂且挑高约3~5m的办公室环境、商超、医院、地下停车场等室内环境(场景2,见图12),利用手机内置传感器(蓝牙、磁力计和加速度计),分别进行蓝牙定位、步态识别和航向估计,并借助无迹Kalman滤波算法实现最优估计。

图12 场景2定位模型Fig.12 Scene 2 positioning model
4 仿真过程示例
本文选择卫星导航系统与装备技术国家重点实验室人工智能试验场作为仿真实验场地,其空间尺寸大约为24.5m×20m×13.2m,实验楼为中间挑空的半封闭结构。
(1)无线基站部署优化
根据经验在环境中部署WiFi和低功耗蓝牙(Bluetooh Low Energy,BLE)时,每个AP之间分别间隔15m和10m,结合CAD图得到每层部署AP的数量。在此基础上,增加部署AP的数量并计算该数量下最优部署方案的CRLB值,待CRLB值的变化不明显时不再增加AP的数量,软件输出结果,最优部署方案如图13所示。
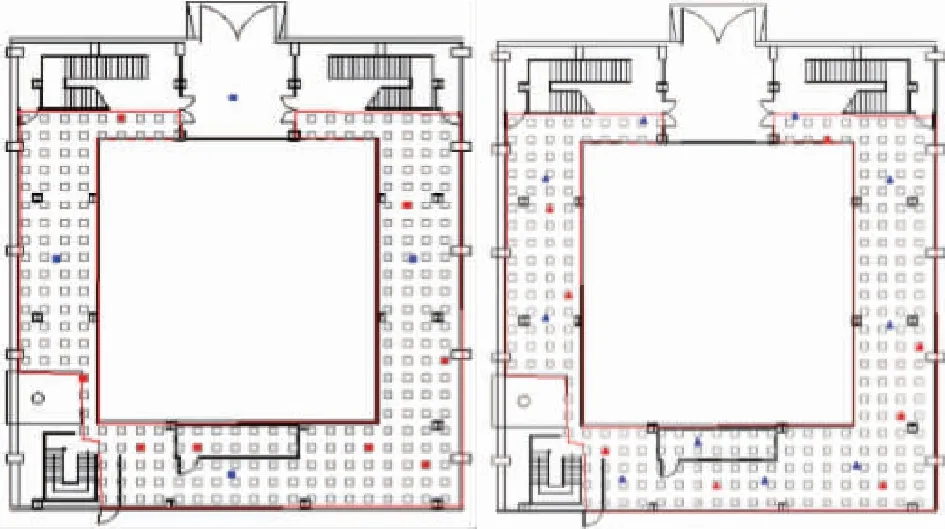
图13 无线信号基站优化部署Fig.13 Optimized deployment of wireless signal base stations
(2)基站信号传播仿真
如图14所示,对试验场进行室内场景的模型构建,设置发射机和接收机参数,仿真室内基站信号传播效应及信号功率覆盖。

图14 信号传播仿真Fig.14 Signal propagation simulation
图15所示为针对试验场基站信号传播损耗进行的实测试验。如图16所示,由仿真系统得出的理论曲线与多次实测曲线大致吻合,验证了仿真系统的有效性。
(3)特征库建立
图17所示为信号指纹库建立的示例,利用已有的稀疏指纹库数据,通过插值算法预测未知点的信号强度,生成稠密指纹库,并上传至指定MySQL账户。

图15 信号传播实测Fig.15 Signal propagation measurement
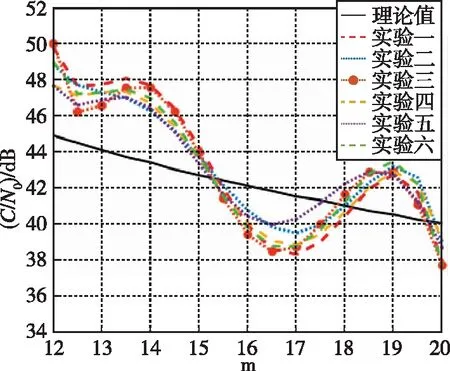
图16 实测结果与仿真结果对比Fig.16 Comparison of measured and simulated results

图17 信号指纹库建立与更新Fig.17 Signal fingerprint database establishment and update
(4)定位性能仿真
如图18所示,场强仿真后执行部署优化操作,系统显示热图和定位性能评估,预测定位精度为1.2m。

图18 定位评估Fig.18 Positioning assessment
图19所示为按照仿真部署方案进行的实测试验,实测定位精度为1.52m,与仿真预测精度大致吻合,验证了仿真工具的有效性。

图19 实测定位精度Fig.19 Actual positioning accuracy
5 结论
本文针对室内多源混合智能定位系统的仿真需求,提出了基于云计算平台的仿真系统架构,该框架的主要特点有:
1)为室内多源定位系统提供建模和仿真环境,涉及定位基站布设、多径信号传输、信号兼容分析、定位精度仿真以及定位数据质量评估等方面。
2)从用户端到底层硬件设施分别为工具层、应用服务层、资源层、平台管理层和云平台层。其中工具层直接面向用户,应用服务层和资源层共同为底层的仿真工具提供服务,资源层对应用服务和工具层所需要的资源进行管理,云平台层及其管理层为上述各层提供环境基础。
3)采用抽象与描述方法、动态组合方法、模型重用架构技术,确保了模型的互操作性、可重用性和可移植性,在保持建模和仿真有效性的同时,减少模型冗余和数据冗余带来的困扰。
4)涉及理论模型包括地面基站部署、无线网络部署、指纹插值算法、混合定位模型等。
5)通过对卫星导航系统与装备技术国家重点实验室人工智能测试场环境的仿真,展示了室内混合智能定位系统仿真模块的仿真结果,与实测结果大致吻合,验证了仿真平台的有效性。
