工业机器人机械手的机电一体化设计
2020-11-16李钢锋
李钢锋

摘 要:随着时代的不断进步,社会的不断发展,工业逐渐趋向于自动化发展,工业机器人在市场中占的比例也越来越大。该文主要从三菱Q 系列PLC 的控制机着手,阐述了机械手的定义、材料组成、具体应用以及针对工业机械手的电机一体化设计方案。
关键词:工业机械手;发展趋势;电机一体化;设计方案
中图分类号:TP273 文献标志码:A
0 引言
人类现在的生活归咎于所有的经济活动,而创造使得人类在历史长河中不断发展,文明快速进步。随着时代的发展,人们发明出越来越多为人类生产生活服务的事物,其中机器人的发明对各领域来说都是其后续发展中至关重要的一环。工业机器人可以代替员工做一些重复的单一的长时间的工业生产作业,或者在充满化学品、辐射等危险环境下作业,最大可能地保证了员工的生命安全。工业机器手的普及反映出现代社会的综合水平大幅度提高,同时也意味着其企业可以在未来市场拥有竞争力。
1 机械手的发展状况
1.1 工业机器人全方位性能不断提高
随着科技水平的不断提高,机器人的应用十分普遍,在各个方面的专业水平都有提高。而工业机器人更偏向于向着操作、方便检修、运转精密和完成效率高等方向发展,并且成本价不断降低。
1.2 机器人组成结构向着重构化发展
现如今,大部分企业在发展中都会运用到机器人。为了拥有更强大的竞争优势,机械手向着重结构的方向发展。新型机械结构可以通过图纸进行重组,进而完成不同的工作任务,一机多用,减少成本。机器人的组成结构向着重结构发展,这使工业机器手更加趋于标准化、新媒体化,使其可靠性、可操作性达到最高[1]。
1.3 机器人传感器及相关控制系统向着标准化发展
机器人的控制系统与传感系统越标准,越受市场的欢迎。随着人们生活水平的不断提高,工业生产需要应用机械手的场合越来越多,机器人的传感器及相关控制系统越来越标准化,这使人机也可以实现远程操控,不需要实际手动操控,节省了大量的人力及物力,增加了企業效益。
2 机械手
2.1 气动机械手的定义
气动机械手的主要组成部分是操作机、控制器、伺服驱动系统以及检测传感结构,它由一段模仿人类实际操作的电脑编程系统控制,使用性能极高,可以代替工人完成一系列重复性或者危险性的工作操作,提高工厂的生产效率与质量水平,保证了工人的人身安全,减少了企业在人力、物力、财力等方面不必要的损失。
2.2 机械手的构成和类别
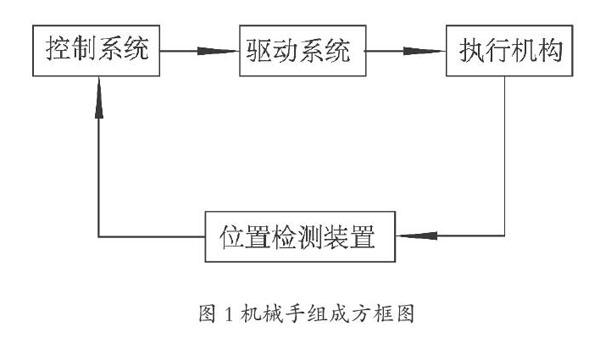
2.2.1 机械手的构成
机械手的主要组成部分是执行机构、手腕、手臂、立柱、行走机制、机座操,如图1所示。
2.2.1.1 执行机构
不同的工业机械手具有不同的工作特点和性能,它们以一种人类无法达到的精准度在不同岗位工作,是工业生产的关键,既保证了员工的人身安全,又为企业带来了很好的效益。执行机构可以使机械手在控制信号下利用某种能源工作,执行能力非常强,于是在时代快速发展的背景下,自动化机械手横空于世,这使得传统的人工操作方式逐渐被替代。尤其是在某些恶劣的生产环境下,机械手的应用可以最大程度地减少人员伤害[2]。例如,在操作某些特殊的阀门时,员工可以操作工业机械手对其进行紧急开关,这样既阻止了危险气体或液体的扩散,又使员工在不损害身体的前提条件下在固定的时间内完成工作。
2.2.1.2 驱动部分
驱动部分的透明化是机械手设计的一大挑战,这就要求工程师在制作机械手时不仅要了解机械手电路分布图,还要进行机械手内部环境的分析,这样可以减少机械手的驱动反应时间,从而获得更好的收益。如果工程师不了解机械手内部系统框架,或没有对合适的相应电路进行分布调整,那么轻则导致后期相应程序的编写繁琐,达不到预期效益;重则无法保证机械电路的安全,形成了严重的安全隐患。驱动部分建设的要求十分精细,这就要求工业机械手的设计师需要具有工业信息方面的专业知识,精通数据库结构,以确保机械手的驱动部分整体操作精简、安全,为企业制造出巨大的效益。
2.2.1.3 控制系统
工业机械手的控制需要电子凸轮与电子齿轮共同实现,这样大幅度地减少机械在运转过程中的磨损。精良的工业机器手不仅需要具有良好的控制系、分布正确的电路线、协调的运转效果、正确的应用指令等,还需要具备工程配置软件(如SIMOTION的SCOUT)、语法解释器(不仅是指自己的语言、而且包括IEC-61131-3的PLC等语言支持)、简单的PLC功能、基本的PID控制算法、HMI交互接口、故障诊断接口等功能或语言,以此确保工业机械手运转安全、有效率。
2.2.1.4 位置检测相关装置
机械手的位置检测装置十分重要,它可以让机械手的相关动作流程更加精确,以达到原有程序编制的预期效果。并且工业机器人机械手的机电一体化的设计要考虑位置检测装置的所处位置,最好将位置检测装置放置在工业机器人的中间位置,以此来更好地检测工业机械手的相关动作流程,并方便负责检测的工作人员。同时,由于位置检测的相关装置安装于工业机械人的明显部位,利于企业能培养出更多的工业机械手位置检测的熟练工[3]。
2.2.2 机械手的分类
可以从工业机械手使用场地、工业机械手用途、工业机械手制作方式等方面对机械手进行分类,并可以分为好几种。
按工业机械手的用途分为专用和通用两类工业机械手。专用机械手具有操作简便、使用对象单一、制造成本价低的特点,主要适用于大批量搬运货物,或在工业生产流水线上搬运相对应的半产品或产品。通用机械手具有灵活多变、适用对象种类繁多的特点,拥有独立的驱动系统和控制系统,它可以由各种不同的程序控制,完成不同的命令。
按工业机械手的驱动方式分为液压式、气压式和机械式3种工业机械手。液压式工业机械手主要可以抓取极重的物品,具有动作灵敏、运送平稳的特点,不适用于高压或低温的工作环境。气压式工业机械手用于抓取质量低于30 kg的产品具,有操作迅速、造价成本低的特点,可用于高温、高速、粉尘大的工作环境。机械式工业机械手是一种辅助型工业机械手,具有准确运行的特点,主要用于主工业机械手的上料与下料。
不同种类的工业机械手各有各的用处,各有各的好处,所以企业要综合考虑其生产的模式与产品的大小挑选出适用的工业机械手,将生产成本降到最低,并从中获得最大的效益。
3 机械手的电机一体化设计方案
气动机械手能够快速准确地完成工人的工作量,所以其具备一定的载重能力、反应速度以及活动灵敏度等。所以先设计的机械设备方案一定要顾及传统的应用要求,尽量兼顾通用性和实用性,使整个设计制造的过程较为简单,并且能够最终实现其适用于不同设计手运转的数据编程。
3.1 机械手的坐标形式与自由度
从工业机械手手臂的不同运动方式来看,其坐标形式可以分为直角坐标式、圆柱坐标式、球坐标式和关节式。从机械手上料、下料时,设备必须具有升降、收缩和回转动作来看,其采用的应该是圆柱坐标型式。为了弥补相应机械手升降运动形成较小的缺点,并提高其自由度的实现,应该适当的增加手臂摆动机构,如图3所示。
3.2 机械手的手部结构方案设计
应根据机械手应用的不同岗位进行系统的结构方案设计。如果所以要搬运的材料是棍棒形状的,可以使用夹持式的部件;如果所需要搬运的材料是板块制的,可以使用气流吸盘形式的部件。
3.3 機械手的手腕结构方案设计
因为机械手需要面对的材料是水平放置的,所以机械手的手腕部分结构需要转动才能完成搬运的动作,所以要将手腕设计成回旋结构,这可以通过使用回转气缸完成,以满足其应用要求。
3.4 机械手的手臂结构方案设计
与手腕结构设计方案目的类似,由于抓取材料的部分特殊要求,在设置手臂时必须要保证可伸缩、可升降,这可以利用各种运动形式的气缸来实现,以此来满足搬运材料的目的。
3.5 机械手的驱动方案设计
受限于机械手的工作环境,其驱动的设计应该使用气压传送的方式。气压传送反应灵敏,所需损耗的阻力较少,动作相对灵敏,最为重要的是成本较低,可以减少企业的初步资金投入。
3.6 机械手的控制方案设计
针对机械手的控制方案设计主要采用编程程序PLC对器件性操作,非常方便、快捷。
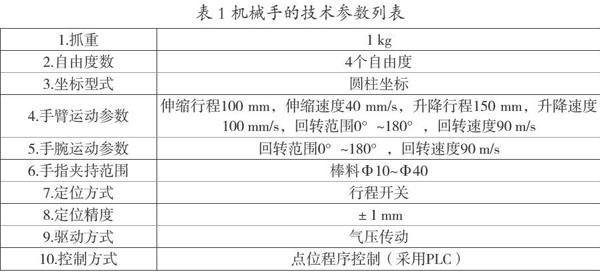
3.7 机械手的主要参数
机械手的最大抓重是工厂考虑适用哪种机械手的最重要的规格考量之一,由于其采用气动方式驱动,因此考虑抓取的物体不应太重,查阅相关机械手的设计参数并结合实际情况,该机械手设计抓取的工件质量为1 kg。
基本参数运动速度是机械手主要的基本参数。操作节拍对机械手速度提出了要求,设计速度过低限制了它的使用范围。而影响机械手动作快慢的主要因素是手臂伸缩及回转的速度,具体机械手技术参数见表1。
4 结语
机器人的主要任务是夹持工件直接向数控车卡盘送料,夹持单元较为简单。企业可以根据工件定位要求,选择范围大,性价比较高的部件,合理规划就可以实现全天候24 h高效生产,从而避免了招工难的一大难题。桁架行架在数控车上方运行,占地面积小,节约客户厂房成本。根据工件的生产节拍将数控设备、机器人控制系统,上下料盘进行自动化集成,一台桁架机器人可控制单台或多台数控车,降低单台机器人使用成本。各轴单独运行,没有多轴累计误差,运行速度快,寿命长,重复定位精度高,夹料定位比多关节机器人更精准,比六关节机器人具更高性价比,更适合大小型工厂的自动化配套加工。不受机床大小尺寸限制,配合上下料盘设计,完成整个生产线。而气动机械手采用气缸式设计,使企业损坏率降到最低,容易保养,成本较低,性价比很高,是未来工厂得以实现的必不可少的重要组成设备。专业技术团队以客户需求为导向,参与加工工艺的设计规划,制定性价比最优自动化解决方案,最终实现工业机械手机电一体化。
参考文献
[1]张雷.移动机器人行业:整体增速放缓,细分趋势明显[J]. 物流技术与应用,2020(3):59-61.
[2]王雄耀.近代气动机器人(气动机械手)的发展及应用[J].液压气动与密封,1999(5):13-16,49.
[3]张籴.浅谈机械手的发展趋势[J].时代汽车,2019(8):31-32.
