一种适用于封闭场景下的遥测信号接收方法
2020-11-16翟万涛丁兴文
翟万涛,丁兴文
(北京遥测技术研究所 北京 100076)
引 言
遥测是获取试验数据、确保试验安全的重要手段,在航空航天、军工试验领域有着广泛的应用。常规的遥测应用多是在开阔场景使用,主要采用抛物面自跟踪天线,全程跟踪目标起飞、航行到降落的全过程。在常规应用中,天线波束窄,大部分时间信号是视距传输,除了起飞和降落时存在短暂的低仰角条件外,其遥测信道近似于高斯白噪声信道。随着科技的发展和应用需求的推动,遥测应用场景得以日益扩展,某些特定的封闭场景下的遥测需求逐步被提出来,而针对特殊场景下的遥测应用研究很少。本文重点针对封闭场景常规遥测方法存在的问题进行分析,并提出了一种可行的遥测方案。
1 现有方案及问题
常规的PCM-FM(Pulse Code Modulation-Frequency Modulation)遥测方案,简化模型如图1所示,主要采用窄波束自跟踪天线接收遥测信号,下变频后将左旋和右旋的两路极化信号送给遥测接收机;接收机首先进行极化分集,然后对合成后的信号进行FM解调,输出PCM码流信号。由于左右两个旋向信号受信衰落情况不同,通过极化分集解决了单路遥测信号衰落问题,通过左右旋互补保证数据的连续性。极化分集合成主要由共模环和差模环两大关键部分组成,其中,共模环部分用于跟踪输入信号的公共频率和相位变化,差模环部分用于跟踪两路输入信号之间的频率和相位变化,并对称控制两路输入信号对应的本振频率和相位,保证跟踪的连续性,避免信号深衰落造成的数据丢失。
某封闭场景下的遥测需求如图2所示,待测目标可能位于封闭空间的上部、中部或者底部等不同位置,目标可能静止或者处于运动状态;接收天线只能安装在封闭体的某一侧。在这种场景下,常规遥测方案应用受到了很大限制。
首先,由于空间受限,天线安装位置距离被测目标距离过近,无法采用单一天线全过程覆盖;另外,在封闭空间内,信道条件发生了极大变化,除了射频信号直接传输外,还存在多种反射和折射路径,形成典型的多径效应[1,2],导致各分量场到达接收端时间不同,按各自相位叠加而造成干扰,使得原有信号失真或者产生错误。图3为在密闭空间内PCM-FM信号的实测典型频谱图,可见信号在频谱中心位置发生了很深的衰落。这种多径信道下的左右旋信号之间存在相位突变,采用极化分集的接收方法,共模环无法有效收敛,导致分集接收失败。而采用单旋向工作模式,无法针对深衰落进行补偿,也会导致丢帧,在高码率遥测时甚至会导致遥测链路频繁中断。

图1 常规遥测接收方案Fig.1 A conventional telemetry receiver

图2 某封闭场景示意图Fig.2 Schematic diagram of an enclosed scenario
2 遥测接收方案
针对特定封闭场景,本文提出了一种可行的遥测方案。天线布局方面,在封闭体的中下部和中上部分别布置两个宽波束天线,其波束覆盖示意图如图4所示。当目标在底部或者顶部极端位置,主要用单侧的天线接收;而目标大部分位置,可以实现双天线同时接收,从而实现空间接力和空间分集,保证信号的全程覆盖。
接收机的选择上,设计了一种多通道空间分集接收机,如图5所示。该接收机采用了小型化设计,并将接收通道扩展了一倍,同时可以支持四路单旋信号输入。接收算法方案的选择上,没有采用常规的极化分集方案,采用了“单路盲均衡+多路合成”的方案。

图3 封闭空间实测典型频谱图Fig.3 Typical spectrum in enclosed scenario
2.1 单路盲均衡
均衡技术是对抗多径信道的有效手段之一,线性调制领域的均衡技术研究得较早,如在QPSK、16QAM等调制中该技术的应用已非常成熟,而由于遥测体制的特殊性,在遥测领域的均衡研究近几年才开始。目前,国外对遥测均衡算法的研究[3]主要分为两类:盲均衡算法和非盲均衡算法;盲均衡算法主要为CMA[4]算法,非盲均衡算法包括ZF算法、MMSE算法等。
盲均衡技术不需要发送训练序列和同步信息,仅利用接收序列本身的先验信息就能够正确恢复发送序列,均衡器可以完全插入到接收端,不需要对原有接收机做大的改动,是一种理想的解决方案。

图4 本文提出的遥测方案Fig.4 The telemetry scheme proposed in this paper
方案采用的CMA均衡算法[5,6]原理如图6所示,主要实现思路如下:用均衡器的滤波器系数向量对接收信号x(k)进行滤波处理,即可得到均衡后的遥测信号y(k)。滤波器系数依据代价函数最小化原则进行自适应更新。

图5 多通道空间分集接收机Fig.5 Multichannel spatial diversity receiver
该算法寻求最大限度地减小由常模量准则定义的代价函数。常模算法的代价函数为

式中,R2是一个常数,由输入符号x(k)决定,可以表示为

均衡器的输出y(k)表示为

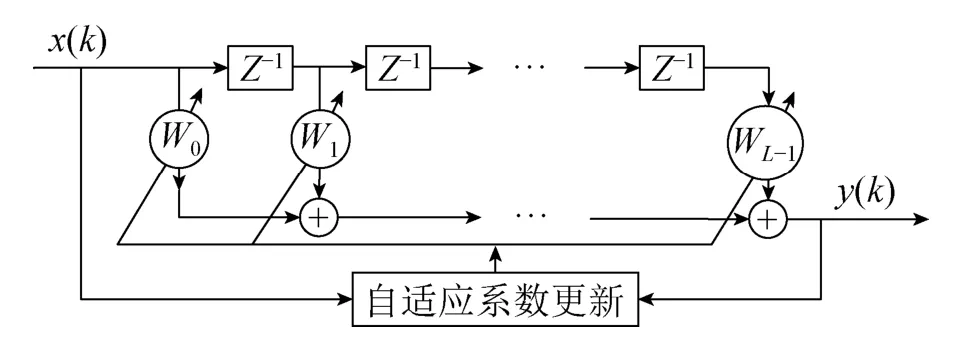
图6 盲均衡器原理Fig.6 Block diagram of blind equalizer
2.2 多路合成
多路合成主要对各路解调后的信号进行最优选择,主要由同步模块和信号优选模块组成,如图7所示。
各路信号由于传输距离不同,解调后的PCM码流无法对齐,另外,盲均衡算法本身也会引入时延,因此,首先要进行同步。同步模块采用基于帧的同步方法,将PCM码流进行帧同步,根据同步标识将数据对齐到同样的位置,并统一读取。
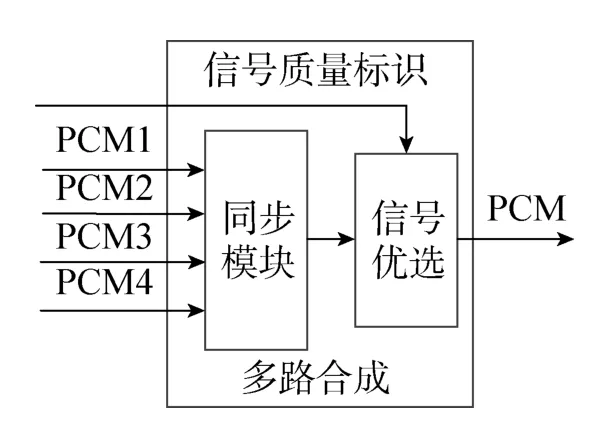
图7 多路合成框图Fig.7 Block diagram of multiplex synthesis
当四路信号在码元级进行同步后,进入信号优选模块,这里可采用不同的合成策略,一般可选的有最大比合并、等增益合并和选择合并等。最大比合并是根据下式计算合并系数:

其中,cp表示计算出的第p个PCM码流的合成系数,Hi表示估计得到的第i个PCM码流的信号质量标识。
等增益合并每路系数完全一致,但只对帧锁定的PCM进行处理;选择合并,选择质量系数最高的一路进行输出。
3 测试验证
构建验证平台,对本方案提出的遥测接收方法进行了实测验证,从被测目标静止和运动两种场景进行测试。测试条件:发射天线为线极化天线,接收天线左右旋独立接收,天线左右旋抑制比大于14dB,工作点频设置为2250MHz,工作体制PCM-FM,码率10Mbps,校验模拟源设置为伪随机码,校验信号输出电平设置为0 dBm。
3.1 静态场景
在静态场景下,多径条件固定,采用误码率和链路成功率来作为指标对比。链路成功率是指在测试时间内,锁定帧数除以发送的总帧数,采用帧锁定指示来作为链路通断的判断条件,其中帧同步码1ACFFC1D,帧同步搜索、校核、锁定容错位数分别设置为2、2、3。
图8左上、右上、下面三组频谱图依次为被测目标位于低部、中部和下部等不同位置的静态测试频谱图,可以看出,接收信号的畸变情况与天线旋向没有明显的对应关系,信号质量主要受多径的影响,而被测目标处于不同位置,总有1~2路信号受到多径的影响较小,可以实现接收。
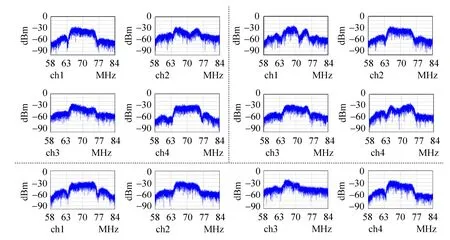
图8 静止不同位置的频谱图Fig.8 Spectrums at different positions
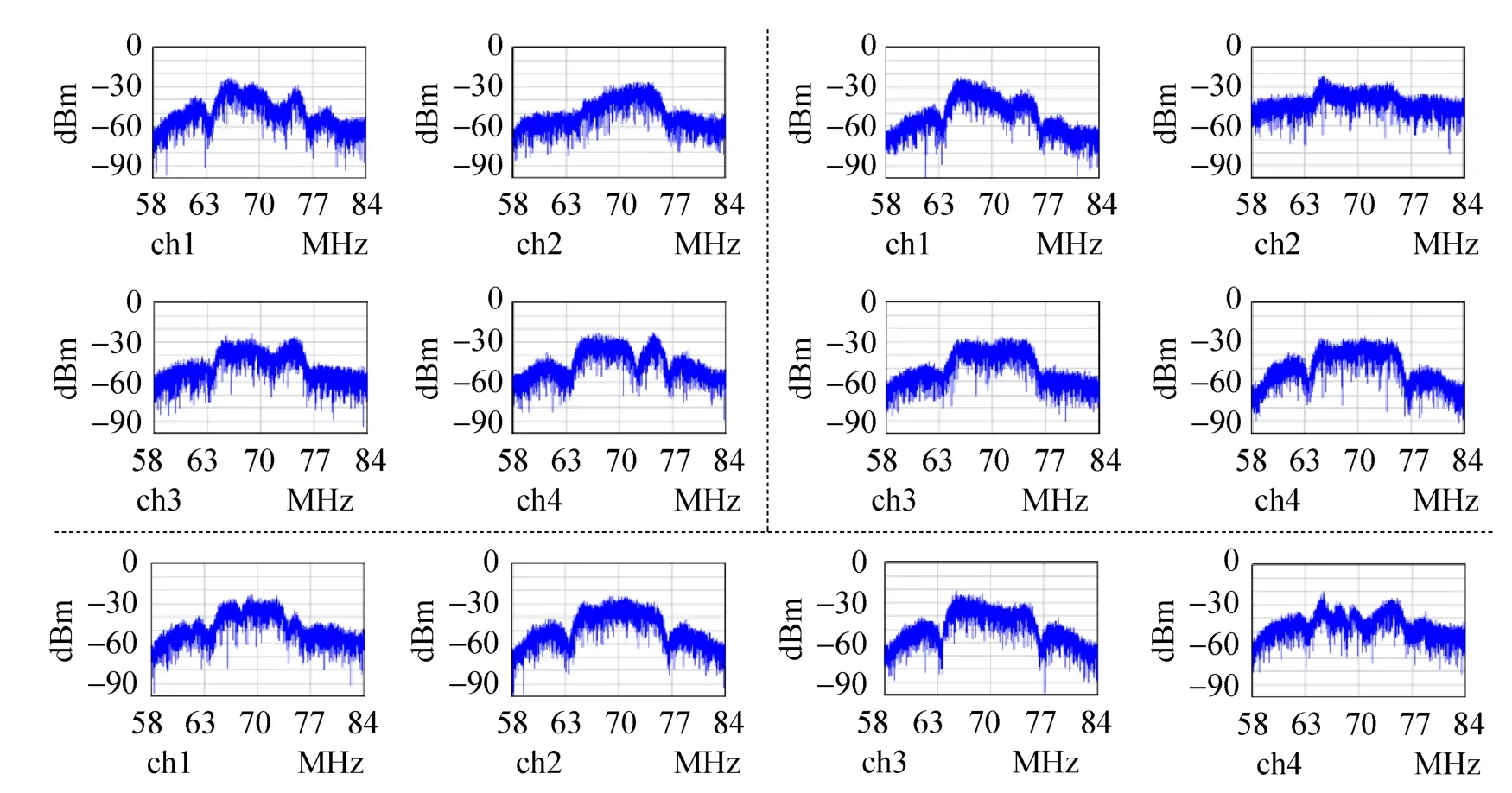
图9 运行中不同时刻的频谱图Fig.9 Spectrums at different times
表1为被测目标处于固定位置的接收情况统计,可以看出,盲均衡对单路信号的误码性能得以提升,而通过四分集,可以实现链路百分百连通。
3.2 运动场景
图5为被测目标运动情况下的频谱图,左上、右上、下面三组频谱图依次为T,T+1s,T+2s时刻。可以看出运动过程中,频谱畸变更严重。经过测试,在动态场景下,多径信道实时变化,且存在条件极其恶劣的情况,此时链路会有闪断,无法有效地进行误码测试。因此,这里用链路连通率作为指标对比。

表1 静态测试结果Table 1 Test results in static scenarios
表2为在采用了盲均衡和四分集的链路连通率提升情况。单路情况下,均衡对动态场景也有提升效果,结合四分集方式,高速码率链路成功率也提升到98%以上。

表2 运动情况测试结果Table 2 Test results in dynamic scenarios
4 结束语
本文提出了一种适用于封闭场景的遥测信号接收方法,针对封闭空间的波束覆盖问题和强多径问题,在布局上通过双天线配置,对空间进行了全覆盖;通过接收机独特设计,采用均衡技术和四分集合成技术,实现了遥测链路的不中断传输,并在实际测试中得到了验证。
