雷达回波序列中弱小飞机目标检测跟踪数据集
2020-11-16宋志勇回丙伟范红旗周剑雄朱永锋达凯张晓峰苏宏艳金威张永杰杨彩霞蔺震樊润东
宋志勇,回丙伟,范红旗*,周剑雄,朱永锋,达凯,张晓峰,苏宏艳,金威,张永杰,杨彩霞,蔺震,樊润东
1.国防科技大学电子科学学院ATR重点实验室,长沙 410073
2.中国航天科工集团第二研究院第25研究所,北京 100010
数据库(集)基本信息简介

数据库(集)名称 雷达回波序列中弱小飞机目标检测跟踪数据集数据作者 宋志勇,回丙伟,范红旗,周剑雄,朱永锋,达凯,张晓峰,苏宏艳,金威,张永杰,杨彩霞,蔺震,樊润东数据通信作者 范红旗(fanhongqi@nudt.edu.cn)数据时间范围 2017-2019年地理区域 中国杂波背景 地面雷达载频 35 GHz脉冲重复频率 32 KHz距离采样单元间隔 1.875 m数据量 8.76 GB数据格式 *.mat, *.txt数据服务系统网址 http://www.sciencedb.cn/dataSet/handle/908基金项目 国家自然科学基金(61401475)数据库(集)组成本数据集由15个数据段组成,每个数据段包含3部分:(1)dataX.mat是第X段包含有目标的雷达回波序列;(2)dataX_gate.mat是第X段雷达回波序列对应的距离波门信息序列;(3)dataX_value.txt 是对应于第X段数据对应的标记文件,标记信息包括对应数据段中从零时刻开始每间隔50 ms所处时刻的目标数、目标编号、目标速度、目标距离。
引 言
雷达具有全天时、全天候、作用距离远、参数估计精度高、响应速度快等特点,能够有效探测感知波束内的目标以及场景,通过相应的信号与信息处理获取目标的位置、速度、运动态势等信息,广泛应用于侦察监视、态势感知、探测制导、目标识别等军民领域[1][2]。随着隐身技术、航空技术以及电子信息技术的进步,雷达探测的对象、场景、环境发生了巨大变化,对雷达系统的目标检测、跟踪、识别性能提出了新的要求[3]。主要体现在:(1)隐身、弱小目标检测跟踪需求。隐身技术和无人技术的飞速发展,使得目标的RCS(雷达散射截面)减小,隐身飞机、隐身舰船、无人机、导弹等弱小目标给雷达目标探测带来挑战,要求雷达系统能够在更远距离上对低信噪比目标实现稳定的探测跟踪[4][5];(2)高速大机动目标检测跟踪需求。推进技术和控制技术的进步使飞行器的速度越来越快,机动能力越来越强,各类超音速、高超音速目标给雷达系统的目标探测带来挑战,反应时间的缩短提高了对雷达远距探测和适应目标高速机动的要求[6][7];(3)低空慢速目标检测跟踪需求。通用航空事业的快速发展催生了无人飞行器产业的崛起,以无人机为代表的“低慢小目标”给低空区域安全带来挑战,提升了雷达系统对低空慢速目标的探测跟踪要求[8][9];(4)多目标、群目标检测跟踪需求。随着信息网络技术的发展,协同化、集群化已经成为一种新型的目标形态,雷达波束内的多目标、群目标给目标探测、跟踪和识别带来严峻挑战,集群目标的态势感知需求迫切[10][11];(5)复杂环境下的目标检测跟踪需求。随着雷达应用场景的拓展,雷达探测环境越趋复杂多变,杂波、干扰、多径、遮挡等复杂环境给雷达探测带来挑战,低信杂比、低信干比条件下的目标检测跟踪需求成为常态[12][13];(6)人工智能发展对雷达数据的需求。随着人工智能技术的发展,基于深度学习的目标检测、识别、分类研究成为热点,深度网络对雷达数据的需求量非常大,特别是具体应用场景下的标准雷达回波数据集[14][16]。国内外学者和研究机构针对雷达目标检测跟踪的新需求开展了大量的研究工作,在探测跟踪方面取得了一系列成果,相关研究对于雷达数据的需求十分迫切[17]-[20]。
然而,与上述紧迫需求不相匹配的是,当前科研领域的雷达数据比较分散,仅有的少数几个公开数据集也都是关于自然环境的雷达回波数据[21]。关于雷达目标环境回波数据的描述、格式、标注等没有统一的标准规范,也没有形成可以服务于雷达弱小目标检测跟踪应用的公开的标准回波数据集,因此导致该领域的科研学术研究缺乏行业标准化数据支撑,相关的算法性能测试、评估等缺乏一致的数据标准。
鉴于上述迫切的应用需求和匮乏的数据现状,本数据集通过典型场景设计、外场试验录取、数据处理标注、数据使用方法及评价准则设计等步骤和方法制备了面向雷达回波序列中弱小飞机目标检测跟踪数据集。本数据集尚属首次成系统地公开发布以杂波下雷达弱小目标检测跟踪为研究需求的雷达回波序列数据集,填补了雷达目标探测识别领域中标准公开数据集的空白。
此外,本数据集中的部分数据已经提供给由国防科技大学和中国航天科工二院联合主办的第二届“空天杯”创新创意大赛——探测识别算法挑战赛(雷达赛题方向)使用。
1 数据采集和处理方法
1.1 数据采集方法
数据采集用到的主要设施和设备为高塔和转台,试验地点位于陕西省宝鸡市眉县(图1)。数据采集试验采用高塔架设转台并搭载带伺服雷达传感器的方式开展。高塔距离地面约90米,窄波束雷达安装于转台上,转台固定于平台边缘并下俯一定角度。视野无遮挡,地貌为玉米、小麦、猕猴桃园等多类农作物。高塔、转台以及伺服系统的使用为获取不同场景的目标雷达回波序列提供了保障。

图1 雷达回波数据录取场景
数据采集使用的传感器为Ka频段通用录取设备,该设备的基本性能参数如表1所示。
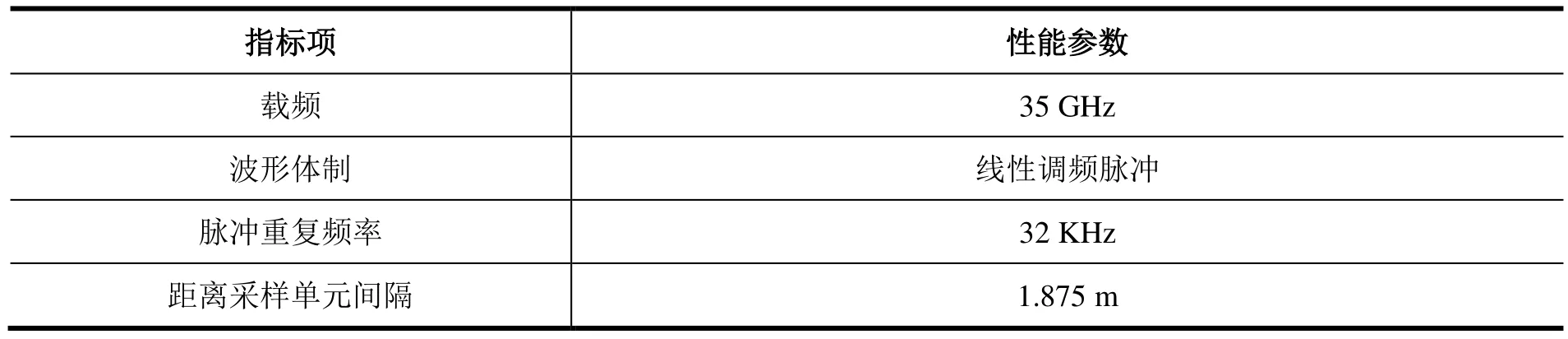
表1 Ka频段雷达的基本性能参数
数据采集的对象为空中固定翼无人机。转台以及目标无人机上装配有GPS通信站,引导计算机接收并解算二者的GPS信息,实时发送角度和距离等解算结果用于引导雷达伺服转动,对无人机目标进行跟踪以维持目标位于雷达的视场中,同时数据录取设备进行回波的同步采集与保存。
数据采集的主要环境背景及场景设计如表2所示。

表2 数据场景情况
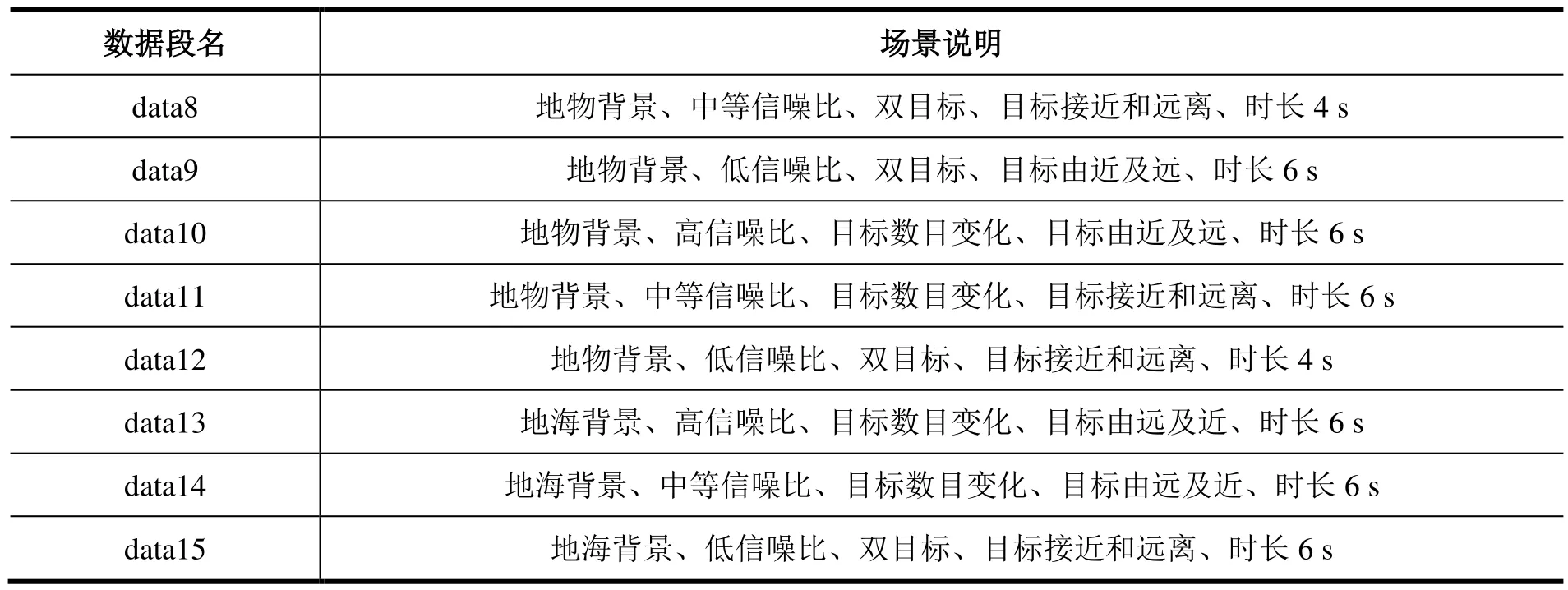
注:其中双目标指波束内包含一个大目标和一个小目标,大目标信噪比越20 dB,且不变化。信噪比参数指的是小目标的信噪比,低信噪比条件为小目标信噪比3 dB左右,中等信噪比条件为小目标信噪比7 dB左右,高信噪比条件为小目标信噪比15 dB左右。
1.2 数据处理与标注
数据处理与标注是将采集到的原始雷达回波数据进行格式转换,剔除无效及污染数据,按一定的原则,对数据进行加工处理,并为感兴趣的真实目标进行标注,提供真值的过程。
1.2.1 数据预处理
雷达工作模式为脉冲-多普勒模式,每个雷达数据段的原始数据为连续时间采样后的离散数字信号,在数据预处理结果将离散数字信号按照脉冲时刻以及重复周期进行数字下变频处理、抽取滤波处理以及脉冲压缩处理,形成脉冲压缩后的时域脉冲序列[22][23]。由于原始数据中存在由于数据录取设备原因导致的丢帧问题,故在预处理阶段需要剔除丢帧数据,同步修正波门数据,以确保数据的连续性和一致性[24]。
1.2.2 数据标注
雷达数据标注的本质就是通过对数据进行处理,获得确定时刻数据中感兴趣目标的真值,在距离-多普勒模式下真值主要指当前时刻下目标的数目、目标的序号、目标的速度以及距离。考虑到录取的雷达回波数据中杂波强度大、目标动态范围大、信噪比较低等特点,通过对数据进行确定时长的相参积累[25]、CFAR(Constant False-Alarm Rate,恒虚警检测技术)检测[26]、航迹跟踪[27],以及与录取记录的 GPS数据进行比对,采用自动标注与人工标注相结合的方式获得雷达回波序列间隔 50 ms时刻波束内目标的数据以及对应目标的距离和速度值,以此作为真值。
2 数据样本描述
本数据集共包含有15个数据段,数据段的命名从data1开始依次递增至data15。每个数据段都主要包括雷达回波序列、雷达波门数据以及标注真值数据三类,下面分别对这三类数据的典型样本进行描述和分析。
2.1 雷达回波数据样本
雷达回波数据集中每段数据为一定时长内所有脉冲进行脉冲压缩后形成的连续时间脉冲序列,数据形式为二维数组,后缀名为mat,对于某一段数据,文件名为dataX.mat。每个脉冲的采样点数固定为319个,对于慢时间维,脉冲重复频率为32 kHz,脉冲数目根据选取时长的不同而不同,因此对应的二维数组大小不一样。每段数据的采样时刻皆从0时刻开始。单个雷达回波数据样本示例如图2所示,行序号代表慢时间脉冲数,列序号代表快时间采样点数。
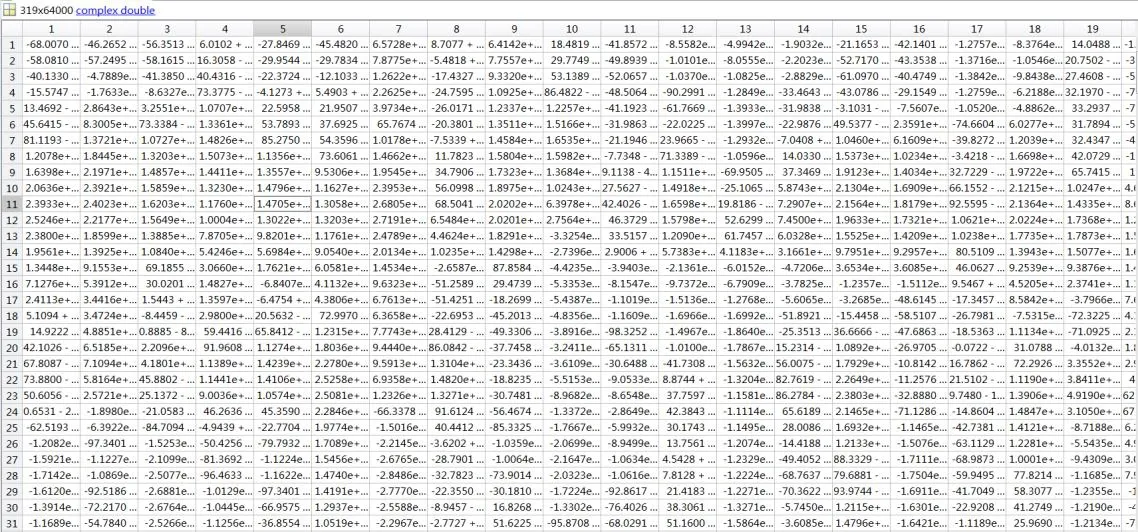
图2 Matlab导入某数据段样本中回波序列详情
对于图2所示的脉冲压缩后的回波序列,通过选取不同的脉冲数目可以进行不同时长的相参脉冲积累,从而获得距离-多普勒图像。图3显示了单目标和多目标场景下基于脉冲压缩回波序列进行相参积累后获得的距离-多普勒图像情况。
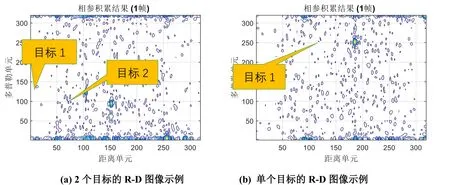
图3 不同目标场景下的距离-多普勒图像
2.2 距离波门数据样本
对应于每一段雷达数据,提供一个雷达距离波门数据文件,数据形式按时间排序的一维数组,后缀名为mat。波门起始位置对应第一个采样点,在整个数据段中随目标移动,更新率为1 ms(32个脉冲更新一次)。某一段数据对应的距离波门数据文件名为 dataX_gate.mat。单个雷达回波距离波门数据样本示例如图4所示。
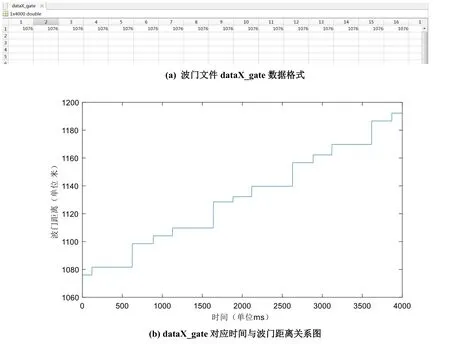
图4 不同目标场景下的距离-多普勒图像
2.3 标注真值数据样本
标注数据结果以的 dataX_value*.txt文件为格式存储,其中 dataX为对应的回波序列文件名称(如data1、data2等),具体格式约定如表3所示。标注文件的具体约束事项如下:
(1)每段雷达回波序列的标注结果保存为1个文件;
(2)按照50 ms的数据率给出标注结果,即每1600个脉冲输出1次结果,第1600*N个脉冲时刻为数据输出时刻,以此类推;
(3)目标的距离和速度估计值的数据类型为浮点类型;
(4)结果文件中所有英文标识均使用小写字母,所有数量标识均使用阿拉伯数字;
(5)输出的检测和估计结果按行存储,若对应输出时刻未检测到目标,则目标数记为0;
(6)同一数据行内不同字段之间以空格间隔;
(7)字段中的标点符号“:”为英文字符;
(8)每个结果文件中的目标都从1开始递增编号。
下面以数据集中data2数据为例对标注数据进行解释说明,如图5所示。
在第1行中,字段“50 ms”表示从第1个脉冲开始至1600个脉冲时刻的时间,即表示本行输出的目标及参数信息为第50 ms时刻对应回波中的目标情况;字段“1”表达当前时刻波束内只有1个目标;字段“object:1”表示接续下来的两个字段是目标1的速度真值和距离真值;字段“40.401786”表示目标1的速度真值,保留小数点后6位;字段“1572.979364”表示目标1的距离真值,保留小数点后6位。第2-44行的字段含义同第1行,可依次类推。在第45行中,字段“2250 ms”表示本行的结果对应的是第2250 ms时刻,也就是第72000个脉冲时刻对应的目标真值信息;字段“2”表达当前时刻波束内有2个目标;字段“object:1”表示接续下来的两个字段是目标1的速度真值和距离真值;字段“40.312500”表示目标1的速度真值;字段“1484.205737”表示目标1的距离真值;字段“object:2”表示接续下来的两个字段是目标2的速度真值和距离真值;字段“107.081051”表示目标2的速度真值;字段“1799.357029”表示目标2的距离真值。第46及之后的字段含义同第45行,可依次类推。
3 数据质量控制和评估
本数据集中的所有雷达回波数据都是通过 Ka频段通用录取设备在专门设计的实验中实测采集得到,目标、杂波等特性真实可靠。雷达回波序列中确定时刻对应的目标真值信息均为全自动标注和人工确认的结果,并经过多次核查检验,以确保数据质量[28]。数据集中所提供的评分准则及程序都已经过大量的实测验证,评分结果符合设计指标[29]。
本数据集中的部分数据已在第二届“空天杯”创新创意大赛(2019)——探测识别算法挑战赛中发布供参赛选手测试及正式比赛使用。目前大赛已经正式落下帷幕,数据集作为探测识别算法挑战赛雷达专题下算法性能比测的重要依据,为大赛评选出了相应奖项类别。该大赛的圆满举办证实了本数据集中图像数据、目标标注和评分准则的质量和科学可信度,可作为更广泛科研人员的数据素材。
4 数据价值
本数据集针对固定翼无人机目标的雷达回波序列检测跟踪问题,设计了15个典型场景,具体涵盖了单目标、多目标、高信噪比、低信噪比、目标由远及近、目标由近及远、目标进出波束、目标穿越主杂波、目标机动等场景。每个典型场景对应1个段数据、共计15个数据段。该类型的数据集在国内尚属首次成系列的公开发布,这些数据情况包括了当前雷达弱小目标检测识别的以下重难点问题:
(1)低信噪比下的弱小目标检测跟踪;
(2)多目标情况下的弱小目标检测;
(3)强杂波下的弱小目标检测。
为满足检测跟踪识别算法性能评估的需要,数据集对雷达回波序列按照50 ms等间隔时刻进行了目标真值的标注,并在这些标注结果的基础上,综合考虑检测正确性、检测精度、航迹正确性、目标漏警、目标虚警等关键评价要素,研究提出了满足复杂场景下雷达弱小目标检测跟踪算法性能综合评测准则,并开放了评分程序代码。本数据集在为雷达检测跟踪相关研究人员开展学习研究工作提供测试实验数据的同时,也能促进部分现有成果的实用化开发,打破当前雷达目标检测跟踪领域数据库分散、数据集不标准、数据流动性和开放性差的困局,为算法研究提供交流、评测和提升的渠道。
此外,在第二届“空天杯”创新创意大赛结束后,众多参赛选手和国内同行对本数据集的补充完善版本都提出了申请需求,这也印证了本数据集的科研价值。图6为空天杯雷达算法挑战赛优秀选手利用本数据集提出的弱小目标检测跟踪框架和部分检测跟踪结果。图7为空天杯雷达算法挑战赛参赛选手基于本数据进行信号与数据处理获得的部分结果图。
5 数据使用方法和建议
5.1 数据使用方法
数据的推荐使用方法是:首先使用者利用自己编制的雷达弱小目标检测跟踪算法或软件读取一段雷达回波序列,并根据算法进行目标的检测跟踪;然后根据标注文件的存储格式,将该段数据的检测跟踪结果保存在自定义文件中;最后通过本数据集提供的评测准则(推荐使用数据集提供的评分程序代码)将真值数据与检测跟踪结果进行比对计算得分,作为当前数据段的结果,也可根据具体的实际应用需求,基于标注结果自行设计新的评分规则并计分比较。
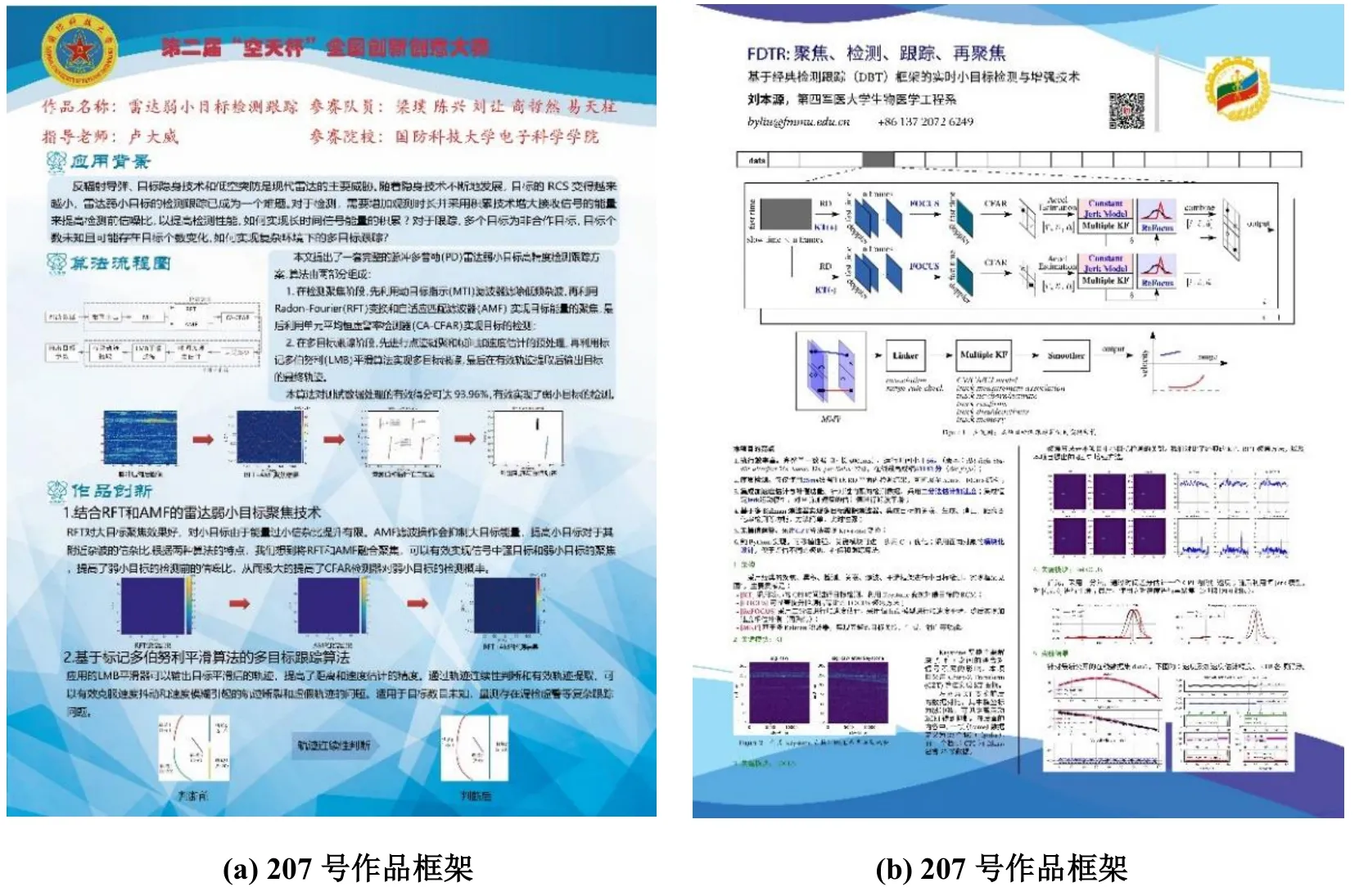
图6 空天杯雷达检测跟踪挑战赛部分参赛作品

图7 空天杯雷达检测跟踪挑战赛部分参赛作品处理结果
5.2 数据使用评价
数据使用后其结果评价可通过如下原则计分评价,分数越高表示性能越好。检测跟踪得分标准为:
(1)正确检测且估计精度满足预定要求:即目标测量/滤波结果位于以真值为中心、大小为[±5m(R)×±0.12m/s(V)]的矩形框内(含),每次加 1 分;
(2)正确检测但估计精度不满足预定要求:即目标测量/滤波结果位于以真值为中心、大小为[±5m(R)×±0.12m/s(V)]的矩形框外,但同时不超出大小为[±10m(R)×±0.5m/s(V)]的矩形框,每次加 0分;
(3)漏检,指以真值为中心的[±10m(R)×0.5m/s(V)]的范围内(含)无检测结果,每出现1次减1分;
(4)虚警,指在以真值为中心的[±10m(R)×0.5m/s(V)]的范围外出现检测结果,每个虚警减2分。
在上述数据使用评价准则下,利用本数据集测试结果满分为2286分。本数据集提供上述评价准则的评分程序代码。
