新疆C波段多普勒雷达地物回波识别方法应用研究
2020-11-15刘军建琚陈相买买提艾力买买提依明范水勇安大维
刘军建 ,琚陈相 *,买买提艾力·买买提依明 ,范水勇 ,安大维
(1.中国气象局乌鲁木齐沙漠气象研究所,新疆 乌鲁木齐830002;2.中亚大气科学研究中心,新疆 乌鲁木齐830002;3.北京城市气象研究院,北京100089;4.新疆气象台,新疆 乌鲁木齐830002)
气象灾害是自然灾害中最为频繁而又严重的灾害。中国是世界上自然灾害频发、灾害种类甚多的国家之一。其中,干旱、洪涝、台风以及中小尺度对流性灾害系统带来的暴雨,大风,冰雹,以及由此引发的泥石流、山体滑坡等次生灾害,严重危及到人民生命和财产安全[1]。对流性天气灾害系统机理复杂、发生周期短、局地性强等特点,使其成为仅次于干旱灾害的第二大灾害性天气系统[2]。多普勒天气雷达是目前探测中小尺度强对流系统的主要非常规观测手段,其具备高的时空分辨率(时间分辨率为6 min一次体积扫描,空间分辨率为150~1000 m),相较于常规地面观测以及气象卫星观测等具有显著优势。因此,多普勒天气雷达观测被广泛应用于气象预报、灾害监测[3]、预警保障、定量降水估计[4]、数值模式同化[5]等研究中。
我国从1998年开始建设中国新一代多普勒天气雷达网。考虑不同天气区域对天气雷达监测的不同需求以及降水对无线电波的衰减影响,业务天气雷达选用S波段(10 cm)和C波段(5 cm)。我国沿海降水多且强度大的地区布设S波段雷达(SA、SB、SC),强对流天气发生和活动频繁且经济较发达的中西部地区布设 C 波段雷达(CC、CB、CD、CCJ)。 多普勒天气雷达探测到信息包括反射率因子、径向速度和谱宽3个变量。其中,天气雷达所探测到的反射率因子除了降水粒子后向散射产生的降水回波,还包括太阳辐射、昆虫(鸟)、地物以及超折射条件下地物产生的非降水回波,因此多普勒雷达观测数据的质量控制优劣是能否正确分析应用雷达观测数据的重要前提。对于雷达反射率因子的质量控制方法主要可以分为3类。第一类是基于模糊逻辑的雷达回波分类算法[6]。其基本思路是输入雷达观测的三个变量:反射率因子、径向速度和谱宽,经过模糊逻辑技术处理对回波进行分类。这种方法可以分别对超折射回波、降水回波、昆虫等晴空回波进行识别。当地物杂波与降水回波同时存在时,这种方法很难进行准确的分类。美国新一代双偏振天气雷达在气象探测业务中的广泛应用,使得基于双偏振观测量的模糊逻辑质量控制方法能够更好地区分降水回波和非降水回波[7-10]。第二类是基于降水回波和非降水回波具有不同的水平和垂直回波结构提出的质量控制方法[11]。该算法使用回波顶高、回波水平变化率、回波强度垂直梯度等参数来判断。该方法主要对超折射回波进行剔除,对于混合在降水回波内的超折射回波,去除后需要利用上层仰角进行填补。基于同样的原理而提出的使用水平回波强度结构和垂直回波强度差等参数的回波判别方法[12]。经过大量试验表明,该算法有利于识别地物杂波、晴空下鸟群回波和昆虫回波等非降水回波。第三类是基于神经网络的天气雷达质量控制方法[13]。该方法用到了较多的判别参量,如前人质量控制方法所用到的最低仰角和第二层仰角上回波点强度、速度、谱宽等局部均值、方差等,另外还采用了最强回波及其所在高度、回波强度权重平均值等。该方法的优点是能够较好地识别回波,缺点是由于需要计算的特征量很多,需要花费较长时间。
国内学者针对多普勒雷达质量控制方法也进行了许多探索和研究。例如:基于水平和垂直回波结构的质量控制算法[14];利用模糊逻辑算法的地物回波识别算法[15-16];基于天气雷达回波强度和速度数据的质量检测方法[17];适合C波段多普勒天气雷达的地物识别MCC方法[18];基于雷达变分同化系统(Variational Doppler Radar Analysis System,VDRAS)的雷达径向速度退模糊方法[19]等。
针对新疆地区特殊的地理位置及气候降水特征等因素,采用了C波段(CINRAD/CC)雷达布网。新疆特殊的地形导致雷达站周围常常有山脉阻挡,造成雷达地物回波、波束衰减等质量问题。因此,无论是天气预报中的实时天气监测还是在数值模式中的雷达资料同化,新疆地区C波段雷达观测数据的质量控制是其能否正确应用的关键因素。本文利用回波纹理变化TDBZ[6]以及径向速度参数,探索于新疆地区CINRAD/CC雷达地物回波识别方法适用性研究,为新疆C波段雷达在灾害性天气分析、定量降水估计及数值模式同化等研究提供一定基础。
1 新疆C波段多普勒雷达
新疆地区目前拥有12部雷达,其中业务雷达8部,兵团雷达4部,均为CINRAD/CC雷达。雷达波长5 cm,探测距离步长300 m,探测范围150 km。雷达在不同季节需要采用不同体扫方式,本文研究选取个例均在夏季,夏季采用14个仰角扫描,分别为0.5°、1.5°、2.4°、3.4°、4.3°、5.3°、6.7°、7.5°、8.7°、10.0°、12.0°、14.0°、16.7°、19.5°[20]。
新疆地形复杂,雷达站周围常有山脉遮挡,本文选取两部典型区域雷达站:北疆伊宁雷达和南疆喀什雷达开展研究。两部雷达站相对于雷达天线的地形高度分布如图1所示,图中圆圈点画线由内往外为50、100、150 km探测半径。从图1a和图1b中可以看出,伊宁雷达位于天山南北山脉所夹的伊犁河谷地区,山脉最高高度>2500 m;喀什雷达位于南疆西部昆仑山北坡,最大地形高度>4000 m。考虑地球曲率影响,计算两部雷达探测范围内0.5°~2.4°仰角上每个距离库的海拔高度,对比3 km分辨率地形高度数据,得到探测范围内0.5°~2.4°仰角地形遮挡区域(图1c,1d)。图中外层闭合曲线为0.5°仰角遮挡区域,内层闭合曲线为1.5°仰角遮挡区域,2.4°仰角没有地形遮挡,可能与使用的地形高度数据的分辨率较粗有关,无法得到更精细的遮挡信息。可以看出,两部雷达低仰角扫描时均存在大量山脉遮挡,会造成地物回波。
2 地物回波识别原理与方法
降水回波与非降水地物回波在雷达反射率三维空间结构中在水平、垂直伸展方向上的变化以及径向速度有所不同[21]。通过水平伸展方向回波纹理变化TDBZ以及径向速度参数处理反射率因子,识别地物回波进行剔除。为了减少孤立点噪声影响,首先进行孤立点去除。
孤立点计算公式为:

其中,N代表以计算点为中心的5(方位角)×5(距离库)个像素内的所有反射率因子为非缺省值个数,Ntotal(=25)代表所有像素个数,如果Px小于75%,则将此点记为孤立点而去除。
TDBZ计算公式为:

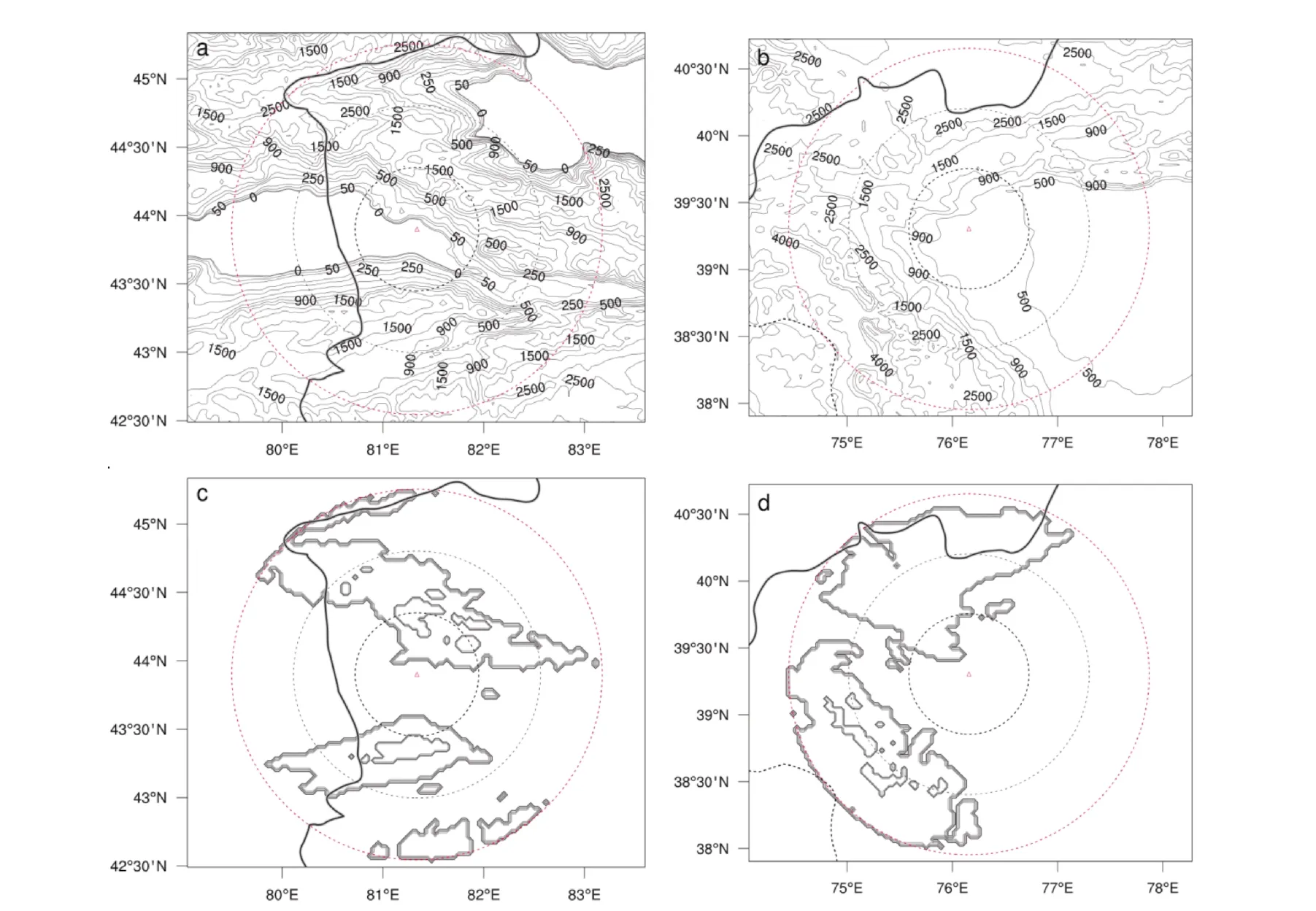
图1 雷达附近相对于雷达天线地形高度(a、b)和地形遮挡区域(c、d)(a、c为伊宁雷达,b、d为喀什雷达)
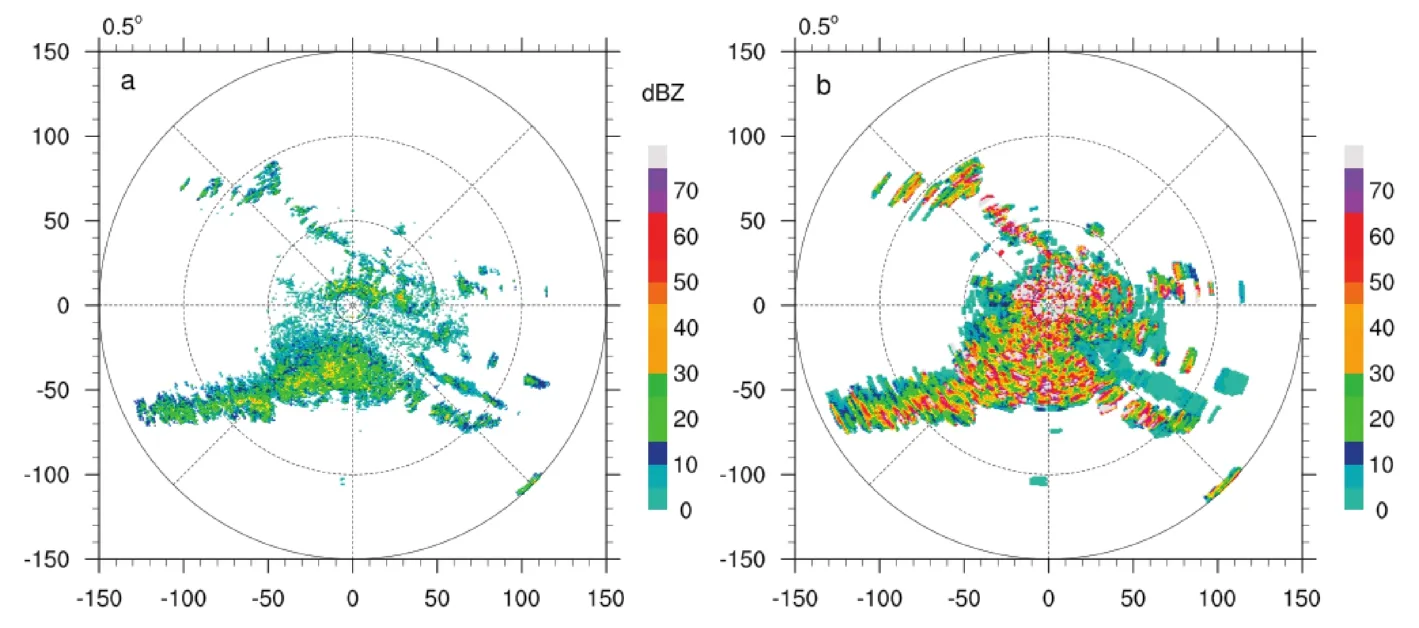
图2 晴空条件下,伊宁雷达0.5°仰角雷达反射率因子(a)和TDBZ分布(b)
其中i、j代表在不同方位角和距离库方向上像素点的位置,Nbeams、Ngates代表方位角和距离库个数,均设置为7,计算像素点与同一锥面上7×7像素点反射率因子方差的均值来描述反射率因子水平纹理变化。以伊宁雷达站为例,图2b中计算每个像素点上反射率因子的TDBZ值,如果TDBZ值超过25.0,认为该像素点上雷达反射率因子在水平上存在严重不连续性,将此点标记为地物回波而剔除。
晴空条件下,以伊宁雷达站为例,图3a,3b径向速度主要集中在-0.5~0.5 m/s。考虑到地物回波像素点上径向速度一般比较小,本文将径向速度-0.5~0.5 m/s的像素点记作地物回波,图3a中径向速度较小值与图2b中TDBZ值超过25.0的分布有较好的一致性。
3 典型天气条件下的雷达地物回波识别分析
雷达基数数据在孤立点去除的基础上,基于TDBZ以及径向速度作为参数进行地物回波的识别,选择两种典型天气(晴空天气、降水天气)来验证方法的有效性。新疆地广人稀,地基常规观测站点空间覆盖率极低,静止卫星产品最适于实时反映大范围的天气气候特征,考虑到静止卫星星下点对卫星产品质量的影响,本文选择静止卫星星下点最接近新疆区域的FY-2H卫星。FY-2H是我国自主研制的第六颗静止卫星,可提供每隔0.5 h一次观测数据,为中亚国家和地区提供良好的观测视角和高频次区域观测,因此利用FY-2H云总量产品辅助验证雷达地物回波识别效果非常适合且很有必要。

图3 晴空条件下,伊宁雷达0.5°仰角径向速度空间分布(a)和频次(b)

图4 晴空条件下,伊宁雷达0.5°、1.5°、2.4°仰角雷达反射率因子地物回波剔除前(a、c、e)与剔除后(b、d、f)对比
3.1 晴空天气条件下雷达地物回波识别分析
2019年07月02 日08时01分UTC时次晴空天气条件下伊宁雷达地物回波剔除前后对比如图4所示,椭圆圈区域代表识别地物回波较多区域,矩形区域代表地物回波识别较少区域。选择与雷达观测时次最接近的FY-2H总云量分布对比(图5a),总云量较多的地方,主要集中在高海拔区域,与大地形走向一致,由于地形遮挡区域的计算也是跟海拔高度有关,可以看出,大部分地形遮挡区域有较多的云存在。图4a中0.5°仰角、0~50 km范围内,能够识别因地物遮挡导致的大部分地物回波,尤其雷达西北至东北方向以及西南至东南方向椭圆圈区域的地物回波。图4b中50~100 km范围内,东北方向矩形区域云量较少,且没有地形遮挡,未能有效识别,图4d中1.5°仰角也是如此。100~150 km范围内,剔除地物回波后,与总云量分布有较好的一致性。随着仰角的抬升,雷达受地物影响越小,地物回波剔除越有效。图4c中1.5°仰角,对比总云量信息分布与范围,椭圆圈区域可能主要受地形遮挡影响。总体来讲,地物回波识别有一定的效果。
2019年7月2 日8时01分UTC时次晴空天气条件下,喀什雷达地物回波识别分析,喀什雷达探测范围内地形相比与伊宁雷达更加复杂,相对于雷达天线的地形高度更高,受地物影响更大,如图5所示。从FY-2H总云量分布图6b看出,总云量较多的地方,同样主要分布在高海拔区域图5a中0.5°仰角、0~50 km范围内,能够识别因地物遮挡导致的大部分地物回波,椭圆圈区域尤其明显,雷达站中附近0~10 km地物回波能很好地识别。图5b中50~100 km范围内,西南方向矩形区域云量较少,且没有地形遮挡,未能有效识别。图5d中1.5°仰角矩形区域,对比总云量信息分布与范围,与总云量大值区和结构有较好的一致性。图5e中椭圆圈区域有一定云量信息,剔除了大部分回波信息,需要使用更精细的地形高数据计算遮挡区域并进行比对。
3.2 降水天气条件下雷达地物回波识别分析
2019年8月17 日14时02分UTC时次降水天气条件下,伊宁雷达地物回波识别分析,验证在降水条件下是否会对降水回波进行误判,错误地剔除降水回波。图7a中0.5°仰角,椭圆圈区域的地物回波与晴空条件下一致,能够有效剔除。图7c中1.5°仰角,雷达南部椭圆圈区域的地物回波能够有效识别,同时图7d中未对降水回波进行误判,保留有效降水回波。图7e中同样剔除了晴空条件下存在的地物回波,并且保留了降水回波。

图5 晴空条件下喀什雷达0.5°、1.5°、2.4°仰角雷达反射率因子地物回波剔除前(a、c、e)与剔除后(b、d、f)对比

图6 2019年07月02日08时00分UTC伊宁雷达(a)与喀什雷达(b)附近FY-2H总云量

图7 降水条件下伊宁雷达0.5°、1.5°、2.4°仰角雷达反射率因子地物回波剔除前(a、c、e)与剔除后(b、d、f)对比
4 结论
本文介绍了新疆C波段多普勒雷达反射率因子地物回波的识别方法,利用3 km分辨率地形高度数据计算雷达探测范围内0.5°~2.4°仰角地形遮挡区域与FY-2H总云量信息作为分析指导的依据,针对不同天气条件,对新疆伊宁、喀什两部雷达的低层仰角地物回波识别效果进行定性分析,结果表明:
(1)基于TDBZ以及径向速度作为参数的地物识别方法在晴空、降水天气条件下,都能有效识别地物回波。
(2)在晴空天气条件下,该方法能够有效识别距离雷达站较近的地物回波,0.5°仰角影响最大,识别效果最好;同时对不同仰角层因地形遮挡引起的地物回波也能有效识别。
(3)在降水天气条件下,仍然能够有效识别距离雷达站较近以及因地形遮挡引起的地物回波,且未对降水回波造成误判,保留降水回波信息。
从定性角度分析,本方法虽然对地物回波的识别方法有一定效果,但仍有部分受地物遮挡引起地物回波未被去除,需要进一步开展定量评估。高分辨率的地形数据以及卫星产品对雷达地物回波的识别有一定指导意义,可作为判定因子进一步改进雷达地物回波识别方法。
