水工物理模型水下高精度超声水位测量
2020-11-13舒岳阶周远航马御风周世良
舒岳阶,吴 俊,周远航,马御风,周世良
(1.重庆交通大学 西南水运工程科学研究所,重庆 400016;2.重庆交通大学 内河航道整治技术交通行业重点实验室,重庆 400074;3.重庆西科水运工程咨询中心,重庆 400016)
1 引 言
水工物理模型实验是研究水利枢纽布置、泄水建筑物工程水力学问题的常用手段。水位是水工物理模型实验最为关键的基础物理参量之一,对模型实验沿程水位的准确获取是模型率定、实验以及认识非恒定流流体流动特性的关键,如何准确快速的获取模型多点水位一直是现代水工量测技术领域研究的热点。
由于水工物理模型是缩尺模型,对测量误差十分敏感,水位测量误差一般要求不高于0.1 mm,量程400 mm或500 mm。目前,水工物理模型实验中常用的水位测量方法主要有水位测针、跟踪式水位计和超声波式水位计。水位测针:价格低廉,精度高(0.1 mm),是被广泛认可的一种水位测量方法,但存在自动化程度低、无法实时测量水位变化等缺点。跟踪式水位计:为了消除水黏滞效应的影响,优化采用逐点探测的方式,使测量精度大大提高,但该方法由于采用电机传动测量,机械部件在长期使用中容易磨损从而影响测量精度。超声波水位计:分为气介式和水下式,其中,由于超声波在空气中衰减速度快,气介式超声波换能器一般在几百kHz,测距分辨率理论上被限制,现有进口传感器测量精度最高毫米级;水下式超声波换能器安装在水下,频率能提高到MHz,其测量精度能达到0.5 mm,但仍低于水位测针和跟踪式水位计的测量精度,一般用在对精度要求不高的模型实验中。
相比于水位测针和跟踪式水位计,超声波式水位测量方法自动化程度更高、可靠性更好,提高水下超声水位测量精度对于促进现代水利量测技术发展具有重要意义。
水下超声波水位测量方法的本质是基于超声波测距原理,现有研究成果主要集中在气介式超声波测距精度提高方法。Guo H[1]讨论了传统的超声距离测量方法制约精度的主要因素。针对气介式超声波测距精度不高的问题,现有研究成果提出了诸多改进措施,主要分为两类:提高超声波渡越时间测量精度以及对声速进行特殊补偿。
方法一,提高超声波渡越时间测量精度。许多研究者认为测距精度不高是由于渡越时间测量精度过低所致[2-9]。Muhammad Ashraf[2]分析了超声波回波信号相位不确定性和频率变化对渡越时间检测精度的影响,提取参考回波信号和不同距离下的回声信号的包络,基于互相关分析方法,分析参考回波包络与不同距离回波包络的相关性,计算超声波渡越时间。Khyam M O[3]指出只有在回波信号与反射信号时间间隔超过相关峰宽度时,相关法才具有较高的精度,否则,将产生较大误差。李勇[4]提出一种基于温度自适应的超声波渡越时间测量方法,通过压电-电压等效数学模型完成自适应滤波算法、基于阈值法及互相关理论完成渡越时间自动跟踪算法设计。Choe J H[5]提出了一种利用超声波换能器系统动态模型得到的接收信号包络数学模型来计算渡越时间的方法。姜燕丹[6]建立超声波接收信号从起振到稳定的数学模型,通过模型参数拟合得到渡越时间参数最优值。张从鹏[7]采用互相关算法,通过确定回波起始位置的范围,比较回波信号各个周期的方差特性,得到回波信号前沿的起始位置。邬文俊[8]采用三段式正反向交替的瞬态脉冲激励方式,得到具有振动反向的过渡谷点特征的超声接收信号。李新波[9]提出了一种针对混合噪声特别是包含噪声背景下的超声回波时延估计算法。曾祥[10]提出了基于经验模态分解的超声波包络检测方法。
方法二,对声速进行特殊补偿。另有一些研究者则通过对声速进行特殊补偿,来提高测距精度[11-13]。Huang,Y. S[11]利用空间分布多点温度平均值代替单点温度,以提高声速补偿精度。Shigeki Ogawa[12]在参考点设置了一个固定长度的声波反射环路,基于该环路对温度变化进行补偿,以提高声速测量精度。Xiao X[13]分析了温度对测距精度的影响,提出了一种基于嵌入式自组织策略功能映射人工神经网络的温度智能补偿方法,以消除外界环境干扰。
现有研究成果只考虑渡越时间或声速单一因素的影响,在特定实验室条件下虽可达到较高的测量精度,但在实际应用过程中发现,实测精度并没有得到实质性提升。如张从鹏[6]、邬文俊[8]、Huang Y. S[11]、Shigeki Ogawa[12]等论文中报道的测距误差分别为1.3,1,0.21,5 mm。现有气介式超声测距方法的测量误差仍远大于传统水位测针的测量误差。
为此,本文提出了一种水工物理模型高精度水位测量方法。在详细分析超声波水位测量误差来源及误差量级的基础上,综合考虑超声波渡越时间和声速对测量精度的影响,设计了专门的水声速测量装置,提出了一种快捷换能器间隙误差修正方法,从原理上消除声速补偿导致的测量误差;基于超声波回波信号包络相似性特点,提取信号包络以计算渡越时间,以提高算法对不同距离信号衰减强度的适应性。根据提出的方法,研制了水工物理模型超声波水位测量系统样机,并进行了计量检定实验。
2 水工物理模型水下超声水位测量
原理及误差分析
2.1 测量原理
水工物理模型水下超声水位测量原理如图1所示,将超声波换能器置于水下,超声波换能器垂直向上发射超声波,超声波在水气分界面处发生反射,反射的超声波信号被同一换能器接收,通过渡越时间和水下声速即可计算得到当前水位。

图1 水下超声水位测量原理Fig.1 Principle of underwater ultrasonic water level measurement
设水下声速为v,超声波从发射到接收之间的时间间隔为渡越时间t,则水位高度H为:
(1)
对式(1)取全微分可得:
(2)
则水位高度系统误差ΔH为:
(3)
水位高度随机误差δH为:
(4)
合成不确定度σ为:
(5)
其中:δvmax为速度的极限误差,δtmax为时间的极限误差。
从式(5)可以看出,影响超声水位测量精度最关键的两个参数是水声速和渡越时间。
2.2 误差量级分析
现有水下超声波水位测量方法通常采用温度-声速经验公式计算水声速,采用阈值比较法计算超声波渡越时间。
2.2.1 水声速对测量误差的影响
水下声速约为1 500 m/s,但在水温、深度(压强)、水质、水流特性等因素的影响下,其变化较大。五阶温度-声速经验公式如式(6),在25 ℃时,实际声速为1 498.54 m/s,而经验公式值为1 495.20 m/s,相差3.34 m/s,实验表明,利用五阶经验公式计算得到的声速与实际水下声速相差数米:
c=1 402.336+5.033 58t-5.795 06×10-2t2+
3.316 36×10-4t3-1.452 62×10-6t4+
3.044 9×10-9t5.
(6)
水工物理模型实验水位测量范围通常为0.5 m,设在满量程情况下,H=0.5 m,v=1 498.54 m/s,Δv=3.34 m/s,超声波渡越时间t=2H/v=0.667 3 ms,将这些参数代入式(3)和式(4)中,得到由于温度补偿法引起的水位测量系统误差和随机误差均高达1.11 mm。而且,声速在水质、水深、水流运动等随机因素的影响下,测量误差毫无规律可循,导致难以消除或减小。
2.2.2 渡越时间对测量精度的影响
通常采用阈值比较法测量超声波从发射到接收的渡越时间,其原理如图2所示。

图2 阈值比较法Fig.2 Thresholds comparison method
其中,A为发射信号,B和C为不同距离的回波信号。以某一电压值作为阈值,由于发射信号幅度固定不变,因此计时的起始时刻是确定的,回波信号的强度随距离增加而快速衰减。在阈值比较过程中,极易丢失一个周期以上的时间。为了提高精度,通常做法是提高放大倍数和超声波换能器频率。但放大倍数无法一直提高,并且当放大倍数很大时,环境噪声也随之增大。换能器频率越高在水中衰减越快,导致量程越小。因此,阈值比较法始终存在着丢失周期的问题。现有水工物理模型中的超声波水位计的换能器频率一般为1 MHz,若丢失一个周期,则渡越时间误差为1 μs,设v=1 498.54 m/s,代入式(3)和式(4)中,可得系统误差和随机误差均高达0.75 mm。当丢失更多的周期时,水位测量误差也将会更大。
2.2.3 小 结
从上述分析中可以看出,经验公式声速计算法和阈值比较测时法均会引入较大测量误差。若仅仅只优化声速补偿精度或渡越时间测量精度,则测距综合误差仍然远大于水位测针测量误差。
3 精度提高方法
3.1 兼顾水声速与渡越时间的水下超声水位高精度测量原理
根据误差分析结果,只有同时提高水声速和渡越时间的测量精度,才能真正提高超声水位测量精度。为此,在水下超声水位测量仪中,单独设置一支水声速测量传感器,将该传感器与其他水下超声波水位测量传感器置于同一水体环境中。水声速测量传感器实时测量水下声速,以跟踪水体环境变化对声速的影响,并将水声速实测值实时反馈给超声波水位测量传感器,如图3所示。

图3 水下超声水位高精度测量原理Fig.3 High-precision measurement principle of underwater ultrasonic water level
3.2 考虑换能器间隙误差的高精度声速测量方法
为了规避温度补偿的弊端,设计了水声速测量装置直接测量水下声速。该装置结构形式如图4所示,超声波换能器安装在中空透水框架结构的A端面,平行端面B作为反射面。两端面间的距离为L,超声波从发射到接收的渡越时间为t,则水中名义声速V可表示为:

图4 声速测量装置Fig.4 Sound velocity measurement device
(7)
由于超声波换能器存在安装和加工等原因造成的间隙误差,导致超声波换能器的实际起始端面A0与名义起始端面A并不在一个平面上,即A0≠A,如图5所示。

图5 超声波换能器实际起始端面Fig.5 Actual starting face of the ultrasonic transducer
设L0为发射端面间隙误差,即A0与A之间的距离,实际声速V0可表示为:
(8)
名义声速与实际声速之间的误差为:
(9)
根据式(9),相对声速误差为:
(10)
设两端面距离L=100 mm。L0未知,假设L0=1 mm。25 ℃时,实际声速V0=1 498.54 m/s。代入式(10)后,可得η=1%,ΔV=14 m/s,远大于利用经验公式计算得到的声速误差。L0越大,声速误差越大。因此,必须消除由于名义起始端面与实际起始端面不对齐带来的误差。根据式(10),相对声速误差是L和L0的函数,由于传感器出厂后,L和L0为定值,因此,相对声速误差为系统误差,可以从原理上消除该误差。
为此,本文提出了一种快捷L0计算方法,通过改变B端面的位置,求得L0。

图6 快捷间隙误差计算方法Fig.6 Fast clearance error calculation method
设L1,t1分别为反射面位于B1时的名义标距和超声波渡越时间,L2,t2分别为反射面位于B2时的名义标距和超声波渡越时间。则有:
(11)
根据式(10)可得:
(12)
即通过两个不同位置的超声波传播时间,可求出超声波换能器间隙L0。水声速测量传感器在出厂时,可通过该方法对L0进行标定,以后使用时,不需要再对传感器进行标定。将式(12)代入式(8)可得,即可得到水下实际声速。式(8)得到的水下实际声速的值随水质、水流、温度、水深等因素变化而变化,跟随性好,将该值代入式(1)中,理论上可消除因声速补偿精度不高导致的测距误差。
3.3 归一化包络时差检测法
超声波发射信号与回波信号的包络具有相似性。发射信号波形、幅度固定不变,作为基准信号。回波信号的强度随测量距离的增加而快速衰减,但其包络形态不变,基于该特征,利用峰值检测法提取超声波发射信号和回波信号的包络,并进行归一化处理,根据归一化包络计算超声波渡越时间,以适应不同测距范围。基于归一化包络时差法的超声波渡越时间离散数值计算过程如下:
(1)对接收信号进行采样,得到数字信号f(kTs),采样点数为K,该信号由发射信号和回波信号组成;
(2)检测f(kTs)上所有波峰,记录每个波峰的位置及幅值,组成波峰数组;
(3)利用一维样条插值算法,对波峰数组进行插值,插值点数仍为K,插值结果为g(kTs),此即为原始超声波模拟信号的包络;
(4)将包络g(kTs)分成两部分,前一部分为发射信号包络s(mTs),长度为M,后一部分为包含回波信号的包络r(nTs),长度为N,其中M+N=K;
(5)求s(mTs)最大值smax,将s(mTs)除以smax,进行归一化处理,得到归一化的发射信号包络s′(mTs)=s(mTs)/smax;同理,对r(nTs)进行归一化,找到最大值rmax,得到归一化后的信号r′(nTs)=r(nTs)/rmax。
(6)对r′(nTs)信号依次滑动取M个点,计算范数h(i)=‖s′(mTs)-r′((i+m)Ts)‖2,其中0≤i≤N-M,h(i)取最小时的位置为i,则发射信号与接收信号之间的时间差t=(i+M)Ts。
t即为超声波渡越时间,该方法原理上不会因信号衰减导致渡越时间测量过程中丢失周期。
4 实验结果与分析
基于上述方法,研制了水工物理模型超声波水位测量仪,由1支水下声速测量传感器、多支水下超声波测距传感器和信号采集分析仪组成,如图7所示。由于水工物理模型水体中存在大量的悬浮颗粒杂质,根据超声波散射信号模型[14],换能器频率过高时,超声波绕射能力不足,水中悬浮颗粒成为反射体,导致回波信号夹杂大量噪声。但是换能器频率降低时,水位测量分辨率也随之降低。通过不同频率回波信号质量对比,选定的换能器频率为1 MHz。

(a)超声水位测量传感器、信号采集分析仪

(b)水下声速测量装置
为了验证本方法的测量精度,在重庆市计量质量检测研究院进行了计量检定实验。计量检定系统由超声波水位测量仪、高精度电动位移平台(位移精度5 μm)、水槽等组成,如图5所示。将水下超声波测距传感器固定安装在电动位移平台上,换能器淹没在水下;将水声速测量传感器浸没在水中。控制电动位移平台移动固定距离,记录移动量与传感器实测数值,对水工物理模型超声波水位测量仪进行检定。

图8 计量检定实验Fig.8 Measurement verification experiment
测量结果如表1、表2所示,第4列为第3列测值减去第3列第1个值,第5列为第2列与第4列之差。由表可知,绝对误差均小于0.1 mm。

表1 第一次测试结果

表2 第二次测试结果
以电动位移平台定位值为x轴,以传感器实测位移值为y轴,得到曲线如图9所示,标准距离与测量距离的线性度非常好,两条曲线的线性相关系数均为1.0。
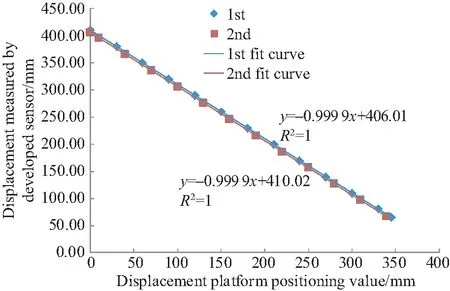
图9 检定实验结果Fig.9 Measurement verification experiment results
本测量系统经重庆市计量质量检测研究院检定,400 mm量程范围内,测量误差小于0.1 mm,计量校准证书如图10所示,本系统能够较好地满足水工物理模型的试验需求。

图10 计量检定证书Fig.10 Metering verification certificate
5 结 论
受复杂水体环境和超声信号衰减特性的影响,只提高超声波渡越时间和声速其中一种的测量精度,无法从实质上提高超声波水位测量精度。本文综合考虑渡越时间和水声速的影响,提出了一种高精度水下超声水位测量方法。分析了换能器安装间隙误差对水声速测量精度的影响,提出了一种快捷间隙误差计算方法,从原理上规避了温度补偿经验公式的弊端。基于回波信号形态相似性,提出了归一化包络渡越时间检测法,从原理上解决了信号衰减导致渡越时间测量过程中丢失周期的问题。最后,通过计量检定实验验证了本方法可行性,实验结果表明,在400 mm量程范围内,水位测量误差小于0.1 mm。本文提出的方法有效解决了超声波水位测量精度低的问题,可广泛应用于水工物理模型实验水位的高精度测量。
