基于PRT交通系统的自动防护系统
2020-11-12杨鸿铭王海龙王利军
杨鸿铭 王海龙 王利军

摘 要:PRT个人捷运交通系统为无人驾驶功能的新型交通系统,具备乘坐舒适、搭乘便捷、较低建设成本、较低运营成本的优点。PRT系统由小型车辆及其专用走行线路组成,将传统“人等车”的理念转变为“车等人”。文章分析了适用于PRT车辆的专用自动防护系统(AVP系统),其独立于PRT的中央控制系统,利用物理块原理实现车辆自动防护及防撞,确保所有车辆在线路上有序运行,确保车辆无追尾、碰撞等安全事故发生,确保车辆在线路交汇处安全有序通过。文章从AVP系统的结构组成、信号时许、可靠性分析入手,可为后续PRT工程提供参考。
关键词:PRT技术;AVP系统;自动防护;无人驾驶;新型交通
中图分类号:U491.2 文献标识码:A 文章编号:1671-7988(2020)19-38-04
Automatic vehicle protection system based on PRT traffic system
Yang Hongming, Wang Hailong, Wang Lijun
( China Railway Second Hospital Engineering Group Co., Ltd., Sichuan Chengdu 610031 )
Abstract: PRT is short for personal rapid transit, which is a new type of transportation system with driverless function. PRT system has the advantages of comfortable riding, convenient riding, low construction cost and low operating cost. The PRT system consists of small vehicles and their dedicated routes, transforming the traditional concept of people waiting for cars into cars waiting for people. This paper analyzes the special automatic vehicle protection (AVP system) for PRT vehicles, which is independent of PRT the central control system, using the physical block principle to realize automatic vehicle protection and anti-collision The system makes all PRT vehicles run orderly on the straight and branch guideway, so as to ensure that there is no collision, speeding and other unsafe accidents. This paper starts from the structure composition, signal timing and reliability analysis of the AVP system, which can provide references for subsequent PRT projects.
Keywords: PRT technology; AVP system; Automatic vehicle protection; Driverless; The new traffic
CLC NO.: U491.2 Document Code: A Article ID: 1671-7988(2020)19-38-04
前言
PRT(Personal Rapid Transit)個人捷运交通系统,是一种采用自导向功能的小型车辆(额定载客1-6人),沿着专用的道路运行,具备自动无人驾驶功能的新型交通系统,由小型车辆及其专用走行线路所组成。车辆由中央控制系统自动调度,乘客平均等待时间不超过10秒,实现“车等人”的交通理念,为乘客提供点到点的私人化、专享化交通服务。PRT可作为机场、码头间的客运交通线路,连接大城市和卫星城之间的交通线路,也可作为城市风景观光游览线的交通干线。PRT系统由车辆系统、控制系统、自动防护系统、通信系统、屏蔽门系统、充电系统、自动售检票系统组成。目前英国希斯罗机场PRT线路为全球唯一成功运营的PRT项目,成都天府国际机场将会建成国内首个、全球第二的PRT线路。
1 AVP系统概述
AVP,Automatic Vehicle Protection,车辆自动安全防护系统,独立于中央控制系统,采用自动防护功能使得所有车辆在线路上有序运行,确保车辆无追尾、碰撞等安全事故发生,确保车辆在线路交汇处安全有序通过。系统以固定块原理运行,通过控制车辆路径(称为导轨)上的固定物理空间块的占用信息来维持安全性。
2 AVP系统结构组成及功能
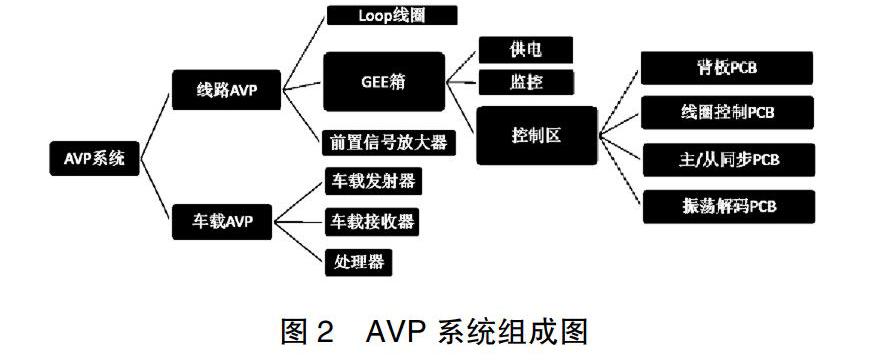
AVP系统包含线路AVP系统和车载AVP系统两个部分。线路AVP为AVP的主要组成部分,由Loop线圈、GEE箱、前置信号放大器。车载AVP主要功能是车载发射器、车载接收器及处理器。
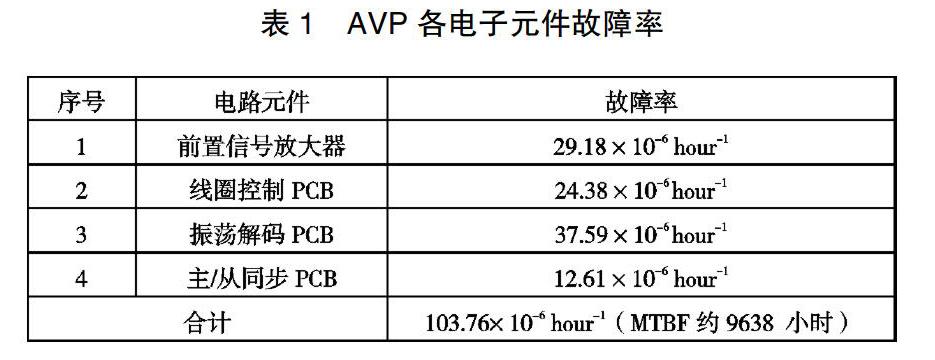
线路AVP中GEE箱为本系统的“大脑中枢”,共分为供电单元、监控单元、控制区。其中控制区由背板PCB(1块/每GEE箱),线圈控制PCB(≤12块/每GEE箱),主/从同步PCB(1块/每GEE箱),振荡解码PCB(1块/每GEE箱),以上电路板均通过承插的方式安装在机架中。
2.1 线圈控制PCB
每个Loop线圈连接独立线圈控制器PCB,含发射和接收电路。此类PCB完全相同,实现任意替换。每个GEE箱内至多安装12块线圈控制PCB,即一台GEE箱至多伺服12个Loop线圈,具体数量根据项目实际情况决定。线圈控制PCB功能如下:
(1)接收来自该下游或下两个GEE箱的“占用”信号。
(2)如果线圈未接收到下游的占用信号,将会连续传输编码信号。
(3)当车轮进入线圈时,车辆发送的信号被前置放大器调制输入进PCB,该线圈中的阈值检测器启动,将会将线圈切换为“占用”。
(4)为前置信号放大器供电24V。
2.2 主/从同步PCB
每個系统仅安装一个主同步PCB,安装在主GEE箱机架中的同步槽中。功能如下:
(1)提供方波信号给GEE箱内,并通过两个互连电缆及从动同步PCB传递到下一个GEE箱。
(2)检测每个GEE箱之间提供信号的连续性。
从同步PCB将主同步PCB方波馈送到下游的下一个GEE箱,实现每个GEE箱之间信号的连续性。
2.3 振荡解码PCB
振荡器编码器PCB有两个主要功能:
(1)生成高频信号。
(2)传输下游GEE的“禁止”信号。
2.4 背板PCB
背板PCB为AVP系统最重要的电路板,线圈控制PCB、振荡编码PCB和主/从同步PCB都插入背板PCB,覆盖整个机架背面,实现各个功能电路板之间的通信。
背板PCB分为两种,一种安装于直线段GEE箱,另一种安装于并轨段GEE箱。其区别在于并轨段背板PCB为可配置电路板,实现一台GEE箱和多台GEE箱间的互联。而直线段GEE箱配置的背板PCB为不可配置电路板,只能实现单台GEE箱与单台GEE箱的连接。
2.5 供电单元
GEE箱中供电单元为箱内设备提供24V直流电源及两个12V电池。 如果系统中的电源出现故障,电池容量将为AVP系统持续供电确保在导轨上的车辆完成行程。
2.6 监控单元
GEE箱内各个模块的运行状态监测由PLC可编程逻辑控制器实现。该监控单元用于监控GEE箱内各个设备是否良好运行,显示故障位置,同时实现AVP系统和控制系统的通信。
2.7 前置信号放大器
前置信号放大器密封于金属盒类,安装于Loop线圈块内,由GEE箱中线圈控制PCB供电,用以提高Loop线圈接收/发射信号电平。每一个Loop线圈都应配置一台前置信号放大器。
3 AVP系统运行原理
整个PRT线路(除车站和维保区域)被AVP系统Loop线圈划分为若干小块,块长约为2.5-16m,块宽约300-600mm,根据车辆运行速度、线路曲率决定线路Loop线圈布置的密度和尺寸。
每个Loop线圈通过前置信号放大器连接到GEE箱。GEE箱之间也由电缆实现互联。为便于敷设Loop线圈,线路宜为具有U形截面的混凝土路面。线路AVP布置示意图如图4。
线路无车辆行驶时,GEE箱中电路板将会连续发射正弦波信号至Loop线圈,以表示该系统的 “允许行进”的状态。PRT车辆在中央控制系统控制下在线路上行驶,如果其车载AVP探测的信号总是“允许行进”,则该车辆可实现前进运动,如图5。
PRT直线段上有车辆运行时(PRT车辆总是沿固定方向单向运动)其车载AVP系统连续发送“占用”信号至线路AVP系统,线路AVP系统检测到该信号后,将会向车辆上游线路发送“占用”信号,使上游一个或若干个Loop线圈切换到“禁止”状态,上游车辆的车载AVP系统一旦探测该“禁止”信号,即将信号传递给车辆控制系统(VCU,Vehicle Control Unit),该系统停止车辆行驶。即使中央控制系统的行进信号再次出现,车辆也会停止不动。从而禁止上游车辆进入该区域,实现车辆碰撞防护。
线路AVP在直线段和并轨段的GEE箱配置有所不同,并轨段GEE箱通过可配置背板PCB之间的互联允许一个以上的源命令禁止车辆运动。如图7-1,运行到并轨段前的车辆发射的“占用”将被并轨段GEE箱同时传输至上游Loop线圈和并行其他线路的Loop线圈,以实现行进方向和并轨其他方向的车辆碰撞防护。如图7-2,车辆刚刚运行进入干路,其并轨段GEE箱将同时向Y字线路上游两个方向发射“占用”信号,以实现并轨所有方向的车辆碰撞防护。
4 AVP系统信号传输
如图8所示,为了使车载AVP系统和线路AVP系统的通信覆盖相邻Loop线圈的对端间隙(约0.2m), PRT车辆底盘安装前后2组发射天线。车载AVP系统接收天线和车载VCU相连,实现信息传输。
线路AVP系统GEE箱2内的振荡解码PCB通过线圈控制器PCB向匹配的Loop线圈发射频率为45kHz的信号,如图9,此时线路AVP系统处于发射时段:t1~t2=1.5ms,随后线路AVP系统切换到接收时段:t2~t3=3ms。为了实现AVP信号在线路系统和车载系统的传输,系统预先设定车载AVP系统的接收时段和发射时段相位与线路AVP相反。PRT车辆通过时,车载AVP接收天线将会接收来自GEE箱2的45kHz高频信号,表明该Loop2为“前进”状态,同时其发射天线将发送高频信号至Loop2,Loop2在连续两个接收时段接收到前后两个发射天线的高频信号后,系统将识别此线圈有车辆行驶,GEE箱2内振荡解码PCB将识别为禁止信号,并通过电缆,向上游GEE箱传送“占用”信号,Loop1信号切换为连续的高频信号,表示该区域“禁止”。
PRT行驶过程中,车载接收天线将持续接收来自Loop线圈的“行进/禁止”和“限速”信号,将两种信息反馈车载VCU,由VCU进行逻辑判断并对车辆做出“牵引/制动”的指令,从而实现车辆的智能加速或制动。
