“两引一送”机组引风机RB控制研究
2020-11-12邹包产
赵 宇,邹包产
(中国大唐集团科学技术研究院有限公司西北电力试验研究院,陕西 西安 710065)
0 引言
随着火电机组主要辅机制造厂制造水平的提升,主要辅机单列配置的机组在国内已逐渐出现,且机组参数等级也向着大容量、高参数发展[1]。采用两台引风机、一台送风机、一台空预器配置的机组组成“两引一送”单辅机[2]。
辅机故障减负荷(runback,RB)功能是指当机组重要辅机突然跳闸,且机组最大理论出力小于当前实际负荷时,自动控制系统快速将负荷降至机组实际所能达到的相应出力,并保证机组主要参数在安全范围内变化。RB控制策略能够提高事故时机组的自动调节和故障处理能力,避免造成重要设备损坏或非正常停机,保证机组的长周期、安全稳定及经济运行[3]。
采用“两引一送”配置的超超临界机组与常规机组相比,在引风机RB功能的实现上有较大区别。因此,本文结合某660 MW超超临界机组进行引风机RB功能研究,并根据机组运行特点提出了一些优化方案,最后通过现场动态试验对控制方案进行了验证。
1 超超临界机组引风机RB控制策略
1.1 RB触发及复位条件
RB触发条件为机组处于协调运行方式或机跟随运行方式时,实际负荷高于RB触发负荷,两台正常运行的引风机中任一台跳闸。
RB复位方式包括运行人员手动复位和RB控制系统自动复位两种。RB控制系统自动复位条件是机组实际负荷低于RB复位负荷或RB动作持续6 min。
RB触发负荷和复位负荷的设置应根据单台引风机最大出力试验结果确定。
1.2 RB目标负荷、负荷变化率及目标燃料量
引风机RB触发后,机组实际负荷指令按照设计的负荷变化率降至RB目标负荷。
对于引风机RB动作,负荷变化率一般选择为100%额定负荷/min。机组的负荷变化率直接影响锅炉燃料指令变化速率,对于机组快速降负荷起着重要作用[4]。
RB目标负荷应低于单台引风机所能承受的最大负荷。根据RB动作前锅炉燃料指令和实际负荷相比较得出单位负荷对应的燃料指令,最终折算出RB目标负荷对应的RB目标燃料量。
1.3 RB动作回路
引风机RB动作后,机组自动切至“机跟随”控制方式和“滑压”运行方式,锅炉主控强制跟踪计算后的RB目标燃料量。运行磨组按照预先设计好的顺序和延时时间依次跳闸,最终保留3台磨组运行。
自动控制系统在正常工况下均设计有被控对象的设定值与实际值偏差大切手动保护。但在RB动作过程中,控制系统主要参数可能超出正常波动范围。因此,重要的自动控制系统,如协调、汽温、炉膛负压、总风量、一次风压等应在RB动作期间退出偏差大切手动保护功能,使其可以继续保持在自动方式下运行,增加RB成功几率。
引风机RB动作时,一台引风机跳闸后,另一台引风机动叶快速增加至最大,弥补送风、一次风与引风的出力不平衡。为防止引风机过电流,应根据风机最大出力试验结果对其动叶指令输出进行上限限制。
由于RB动作后,机组处于“滑压”运行方式,主蒸汽压力设定值以一定速率下降,且锅炉主蒸汽流量下降速度远低于锅炉燃料量下降速度,导致主再热汽温会有较大幅度下降。因此,应在RB发生后超驰关闭过热器、再热器减温水调门。
2 RB控制难点
超超临界机组的加热段、蒸发段和过热段三者之间没有固定分界点,受不同负荷下给水流量、锅炉燃料量等参数变化的影响,最终导致中间点温度和主蒸汽汽温的相应变化。因此,保持合理的水煤比和风煤比,对于超超临界机组RB控制至关重要[5]。
机组引风机RB发生时,炉膛负压是机组所有重要参数中变化剧烈,也是有可能引起锅炉跳闸的参数。在引风机RB动作过程中时,保证送、引风机之间的动态平衡关系,是机组送、引风机RB试验成功的关键[3]。
在“两引一送”配置的超超临界机组引风机RB动态过程中,存在以下控制难点。
①常规机组通常配置有两台引风机、两台送风机、两台空预器。引风机RB动作时,联锁跳闸对应侧送风机。此时,如果炉膛内部燃烧没有其他异常扰动时,自动控制系统可以迅速将炉膛负压控制在合理范围内。对于采用“两引一送”配置的机组,当一台引风机跳闸后不能联锁跳闸送风机,导致引风机与送风机、一次风机出力之间的动态平衡被打破,炉膛负压快速上升。因此,需要设置合理的风量控制策略,保证调节的快速性和准确性。否则,可能导致炉膛负压保护动作引发锅炉主燃料跳闸(main fuel trip,MFT),或者炉膛内风煤比严重失衡,燃烧情况进一步恶化,RB自动调节失败。
②RB过程中,磨煤机按照预先设定好的顺序和间隔时间依次跳闸,锅炉燃料量迅速减小,但锅炉蓄热量相对较大。此时,应保证给水流量控制与燃料量相匹配,同时锅炉煤水比函数的惯性时间应设置合理[6]。给水流量下降过慢,可能导致水煤比严重失衡,中间点温度及主蒸汽温度下降幅度过大。给水流量下降过快,可能导致中间点温度及过热度快速上升甚至达到保护值,引发锅炉MFT,RB自动调节失败。
3 引风机RB控制策略优化方案
针对“两引一送”超超临界机组引风机RB的控制难点,本方案在常规控制策略的基础上进行了优化。
①引风机RB动作时,另一台运行的引风机动叶切至强制跟踪方式,并超驰开至指令上限,延时3 s后跟踪状态解除,恢复至自动控制模式。引风机动叶自动控制系统通常设计有送风动叶开度对引风动叶的前馈作用,在RB动作期间应通过变化速率限制方式大幅弱化该前馈量,防止在RB初期送风机动叶开度快速减小,导致引风机动叶在炉膛负压自动控制过程中出现反调。
②总风量控制系统的风量设定值基于锅炉给煤量,引风机RB动作后锅炉给煤量指令到位需25~30 s,经惯性环节处理后的风量设定值到位需要时间更长。此过程中,单台引风机出力无法维持炉膛负压在安全范围内。针对此问题,设计负荷指令对送风机动叶的前馈作用。当引风机RB动作时,负荷指令切换至RB目标负荷,前馈量相应减少至RB目标负荷对应的送风机动叶开度,最终作用送风机动叶开度快速减小,保证单台引风机出力与对应的送风机、一次风机出力相匹配。
③RB动作过程中,为防止中间点温度变化幅度过大,单独设计针对RB工况下中间点温度控制的PID参数,保证在RB时将中间点温度控制在合理范围内。其作用效果应强于正常的负荷升降过程。同时,由于RB过程中,锅炉燃料量快速下降,因此RB工况下锅炉煤水比函数的惯性时间应小于正常工况下的时间,根据机组锅炉燃料与给水流量特性关系合理设置。
④机组RB过程中汽轮机处于滑压控制方式。当压力设定值下降较快时,将导致实际压力下降较快。此时,汽轮机调阀开度较大,主蒸汽流量和机组负荷下降缓慢。一旦主蒸汽温度出现下降拐点,将快速下降,且下降幅度较大,即使增加燃料量也无法立即遏制蒸汽温度的下降[7-10]。因此,单独设计RB工况下的压力变化率和滑压曲线。RB压力变化率应略小于正常工况的变化率且RB滑压曲线较正常曲线适当放缓,防止主汽压下降过快导致的主汽温大幅波动。
4 引风机RB试验
引风机RB动作过程机组主参数曲线、炉膛负压自动控制曲线分别如图1、图2所示。
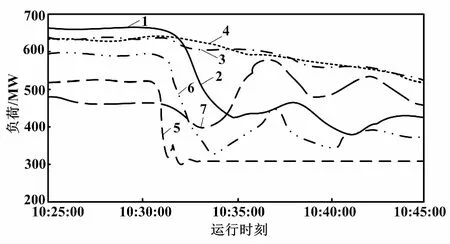
图1 主参数曲线Fig.1 Main parameter curves
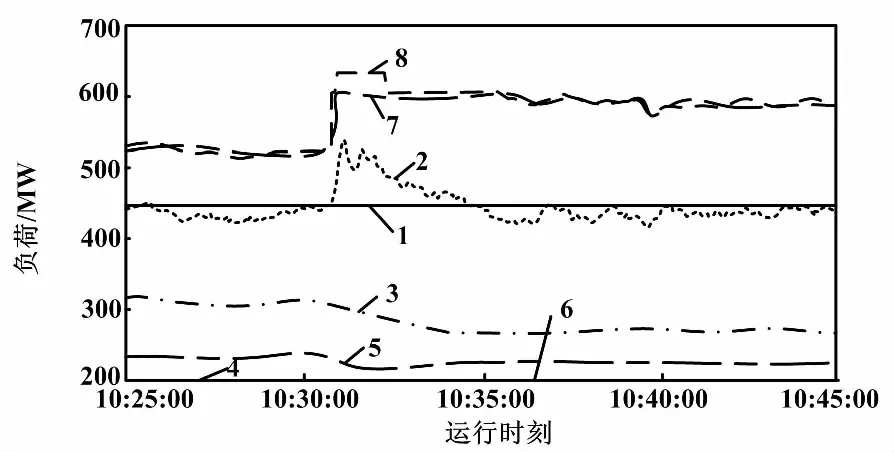
图2 炉膛负压自动控制曲线Fig.2 Automatic control curves of furnace negative pressure
试验开始前,机组处于协调控制方式,“滑压”运行方式,RB功能投入,5台磨煤机运行,各主要自动控制系统工作正常,辅机及辅助设备运行正常。机组负荷662.54 MW,主蒸汽压力26.84 MPa,主汽温586.25 ℃,再热汽温599.3 ℃,总燃料量289.61 t/h,机组其他各主要参数稳定。
运行人员手动打闸引风机B,触发引风机RB,机组切至“机跟随”运行方式,RB目标负荷360 MW,负荷变化率为660 MW/min。E磨煤机跳闸,延时10 s后D磨煤机跳闸,保留3台磨组运行,目标煤量159 t/h。实际负荷从662.54 MW降至389.50 MW,实际主汽压力降至22.85 MPa,中间点温度变化范围为412.60~450.40 ℃,炉膛负压变化范围为-312.92~+873.39 Pa,其他各参数运行正常。负荷降至RB复位负荷,RB试验结束。
5 结论
大型火电机组的RB控制是一项需要多个子系统协调动作的、复杂的综合性控制。针对“两引一送”配置机组的运行方式,结合超超临界机组的特点,设计符合660 MW超超临界机组的引风机RB控制策略,最终实现“两引一送”这种特殊配置机组引风机RB的精确控制。试验结果表明,完善的RB控制功能可实现运行工况的平稳过度,为机组安全、稳定运行提供了保障,同时为在其他同类型机组上的推广应用起到了示范作用[8]。
