基于点云技术电力物资自装卸作业研究
2020-11-12刘必庆谢立超
汪 泳,刘必庆,谢立超
(安徽送变电工程有限公司,安徽 合肥 230601)
0 引言
点云技术在很多领域都有着广泛应用,如几何学、图形学、计算机、人工智能等学科。点云技术在刚问世的时候,由于测量设备十分昂贵,使得该技术的发展受到了非常大的限制,国内针对点云技术的研究也非常稀少。但点云数据通过直接手段或是间接手段采集有关目标的特性密集点数据,可以以此为基础,为现实工作提供更多直接和有效的代表性三维数据。在初始的激光雷达点云经过处理之后,激光点云数据的作用也能得到有效发挥。
1 物资自动化研究
在现阶段的工业自动化领域之内,点云技术也得到了广泛应用,而其中的3D建模在点云技术中的作用显著。通过完整的3D模型和点云建模方法,可以在完整的模型中实施有关的技术研究工作。但在某些复杂的工业场景当中可能会出现一些问题,因此需要通过点云技术加强对子过程的分析。以物资仓库的自动化管理为例,硬件部分的核心是激光三维扫描仪和变压器自动定位系统,有关的研究工作也比较成熟,可以实现物资仓库管理的自动化设计,让货物的装卸过程更加智能化。不过我国在这方面的技术研究时间较晚,自动化变压器仓库还未能得到大规模应用[1-3]。
2 系统概述
2.1 系统功能
①控制激光三维扫描仪采集数据和保存数据,可以按照实际需求选择数据信息[4-5]。
②激光三维扫描仪对变压器和鞍座的点云数据进行扫描后获取定位坐标,并且在理想状态下以本地数据为基础进行测算,将空间位置信息误差和坐标误差值缩小至5 cm以内。
③将所有的采集数据显示在终端区域,按照数据采集的要求与工作规划对数据内容进行调节。
④对所有设备的工作过程信息进行备份,尤其是某些出现错误和报警信息。这些信息可以被作为上传至终端的日志内容。
2.2 系统实现
以变压器装卸为例,系统功能模块如图1所示。

图1 系统功能模块Fig.1 System function module
变压器的自动定位装卸系统一般分为四个部分,显示模块、激光扫描仪相关模块、变压器模块、控制模块。变压器定位模块还细分为出库和入库变压器定位模块。自动定位系统框架如图2所示。

图2 自动定位系统框架Fig.2 Framework of automatic positioning system
激光三维扫描仪控制模块主要用来控制激光三维扫描仪,对变压器行进扫描得到点云数据。点云数据保存处理模块主要用来对扫描仪获得的点云数据进行预处理和对处理后的数据进行保存。
出库和入库变压器定位模块的作用是获取变压器的装卸位置,即对变压器进行相关定位。同时,由于数据量纲以及其他因素的影响,在变压器定位前,需要进行数据预处理。
通过触摸屏,显示模块可以对于整个系统进行必要的设置。此外,该模块还具有显示动态显示整个过程中变压器定位及结果的功能。
2.3 系统流程
系统流程如图3所示。

图3 系统流程图Fig.3 System flowchart
系统开机启动后,首先系统会检查参数是不是正常设置,然后检查是否连接到扫描仪。一切正常后,如果是离线状态,利用保存在本地的数据进行测试;如果是在线状态,直接获取实时数据进行坐标定位。待货车进入到扫描区后,启动变压器出入库定位。然后控制扫描仪开始进行扫描。扫描仪进行扫描后将数据转换为坐标三维点云数据。系统的数据预处理模块会对这些数据进行测算,计算完成后将这些数据保存。如果一直处于离线状态的话,系统会直接根据保存在本地的数据进行后续计算。系统需要根据当前变压器是出库状态还是入库状态进行出入库定位模块的选择。显示模块会将坐标的计算过程显示在画面上,方便操作人员进行监控。坐标计算完成后,系统会自动判断结果是否正确。如果没有错误信息,系统将显示结果;如果有错误信息,则会终止操作。当所有的定位正确无误之后,系统会进入待机状态,等待指令进行下一步操作。
3 系统实现
3.1 数据预处理
3.1.1 数据采集
根据设备种类不同,点云数据的获取方法有接触式和非接触式两种类型,采用声、光、电这几种方式进行测量。当进行实际测量时,主要使用坐标测量法、投影光栅测量法、激光三维测量法进行。其中,坐标测量法是接触式测量法,投影光栅测量法和激光三维测量法是非接触式测量法[6-12]。
不同的应用场景会影响系统测量。在仓库中天车的起吊作业会影响点云数据的测量,所以不能使用接触式测量方法。同时,考虑到仓库环境光线不一定充足,有的仓库的光线非常昏暗。投影测量法使用的电荷耦合器件(charge coupled device,CCD)相机也会受到很大影响,所以也不能使用投影光栅测量法。
本文中使用的是激光三维扫描测量法。该方法只需要将扫描仪安置在变压器装卸区,不妨碍其他设备运行的位置就可以。同时,该测量方法使用激光扫描,精度非常高,且不会受到光照和温度影响。基于这些优势,本系统的扫描方法选用了激光三维扫描法来获取三维点云数据。
3.1.2 点云数据相关算法
本设计所用技术为激光点云技术,其原理为应用激光三维扫描系统将每一个点坐标进行相应的定位。通过旋转棱镜与激光发射器的相互配合,测算出相应距离以及角度,然后配合相应算法记录下相应的坐标信息,最后通过计算机转换最终取得最终的三维坐标信息。
点云技术数据采集流程如图4所示。

图4 点云技术数据采集流程图Fig.4 Data acquisition flow of point cloud technology
一般情况下,一个激光三维扫描仪会由一个二维激光扫描仪和一个云台组成。为得到完整的三维坐标数据,先要测量激光扫描数据,随后将扫描数据和旋转角度融合,计算出三维极坐标数据,最后根据这些数据计算出三维坐标数据。
在扫描过程中,先将每条扫描线极坐标数据测量出来并保存。在测量出全部的三维极坐标信息后,通过下面的公式能够计算出三维空间的坐标数据。
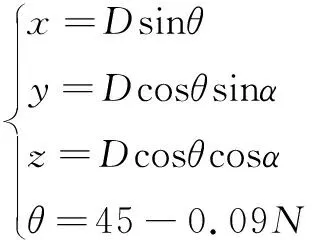
(1)
式中:θ为两条二维扫描线上某一点与Z轴的夹角度数;N为两条扫描线中第N点;D为扫描仪测量得到的发射点距离目标点的距离数值;α为扫描仪进行这两条扫描线扫描时云台的旋转度数。
3.1.3 去噪处理
所有的点云数据测量都会有一定的测量误差,激光三维扫描仪的点云数据测量误差主要是仪器误差、被测物体发射面带来的误差和外部影响。通过激光三维扫描仪测量得到的点云数据的数据量非常大,如果没有好的办法处理这些测量数据误差的话,这些数据将会给后续的精度计算带来非常严重的影响。所以,去除扫描过程中测量数据的噪声和滤波工作非常的重要,要对原始数据进行去燥处理[13-16],减少测量噪声带来的误差。本次设计采用的步骤如下。
①将扫描线上定义扫描线上每一个点量测相邻的两个点作为邻域。
②将扫描线两边最边缘的两点坐标值去掉,求出每个坐标点邻域均值。
③使用每组测量数据的均值替换原中心点的坐标值。
④重复步骤①~③,将全部扫描线测量完毕。
3.2 自装卸实现
3.2.1 自动定位
点云数据经过预处理后,需要根据当前变压器是出库还是入库状态来进行相应的定位操作,变压器为出库状态应当进行变压器转载。这需要对转载货车进行扫描,得到鞍座数据。根据鞍座数据计算得出变压器装载需要的三维空间坐标数据。变压器是入库状态就需要对装载变压器的货车进行扫描,得到变压器弧面数据,再计算出变压器圆柱柱心的三维坐标信息。
变压器入库流程如图5所示。

图5 变压器入库流程图Fig.5 Transformer storage flow
3.2.2 聚类分割
变压器的点云数据需要进行两部操作。首先要进行的是数据分割操作,将无用数据去除。去除完成后再进行聚类,在这一操作中将单组的变压器弧面数据进行聚类提取。在完成这两步操作后,使用直通滤波方式进行分割操作,需要进行两次滤波操作,然后从垂直和水平方向分别滤除货车头部的点云数据,得到需要的变压器点云数据。
3.3 相关实现与验证
测试五组点云数据,每组数据由两个部分组成,分别包含同一辆载重货车在装载变压器和空载这两种情形下的三维点云扫描数据。
为了不影响正常生产运输工作,确保测试工作中的安全,变压器吊放时采用的人工装卸的方法。对这两组数据分别进行出库变压器自动定位操作和入库变压器自动定位操作后,得到这五组变压器的装载和卸载空间位置。
测试数据如表1所示。

表1 测试数据Tab.1 Test data
4 结论
本文基于点云技术,设计了一套电力系统的自动装卸体系。本次设计从点云技术原理出发,随后以电力系统中常见的变压器为例,应用点云技术进行自动装卸设计。本次设计只是对于较为复杂的柱状为例进行了相关计算以及说明,对于较为简单的立方体或者球体其原理大同小异,对于不规则物体则需要进行相关分割再进行测算。由于篇幅有限,并且电力部门涉及到的标准物件较多,故本次研究并未考虑,特殊情况则在后续进行研究。
