基于多源信息融合的车辆避障系统
2020-11-11郑曰文
郑曰文,王 珏,严 程,王 翔
(江苏大学 汽车与交通工程学院,江苏 镇江212013)
1 背景与意义
汽车主动避撞系统(ACAS)是一种辅助驾驶系统,它可以利用汽车上安装的传感器来获取车辆自身以及周围环境的信息,实时地对车辆的状态进行监控[1]。经过研究我们发现,ACAS 可以使得车辆驾驶员在正常的行驶过程中的疲劳感有效降低,并且在车辆的前方有危险发生时会发出预警[2]。当发生紧急情况时避障系统会直接对车辆进行管理,控制车辆使其减速并且制动,使得驾驶员的生命安全能够得到最大程度的保障,从而降低交通事故造成的伤害程度。通过对中国的各类交通事故进行统计发现,有1/3 的交通事故是由于汽车追尾引起的,而引起追尾的原因则有非常多[3]。外界的原因主要是阴雨天气使得能见度偏低,雨雪天气使得路面变得湿滑,车辆控制系统失灵。内部的主要原因是驾驶员疲劳驾驶、酒后驾驶等众多原因。上述的原因都会造成车辆在高速行驶的情况下发生追尾现象,而仅仅依靠驾驶员的感知能力来保障行车过程的安全还有一些问题。
2 基于多源信息融合的车辆避障系统
2.1 特征提取
HOG 特征提取。HOG 特征是一种图像局部区域的特征描述子,因其对光照和几何形变都能保持良好的不变性,常被用于目标检测与识别。以(u,v)表示输入图像的像素点,则图像中像素点的梯度计算公式为:

其中Gu(u,v),Gv(u,v),H(u,v)分别表示图像中像素点(u,v)处的水平方向梯度、垂直方向梯度和像素值。
2.2 特征融合
设提取的一幅图像的HOG 特征、不变矩特征和灰度共生矩阵特征的特征向量分别为[a1,a2,a3,…,an]、[b1,b2,b3,…,bk]、[c1,c2,c3,…,cm],将其融合,得到融合的特征向量V:

本文图像经前文算法运算之后,所提HOG 特征经降维操作得到的特征向量的维数为376 维,不变矩特征的特征向量的维数为7 维,灰度共生矩阵特征的特征向量的维数为5维,以上三类特征经归一化处理,根据相关特征向量间线性组合不影响其不变性的特点,采用线性融合方法将3 种特征向量直接串联得到新的388 维的融合特征向量。
3 车辆避障系统实现
车辆换道避障分析如图1 所示。将智能车辆感应并获取到的路况图像进行多源信息融合,并按照避障规则进行避障,最终实现。
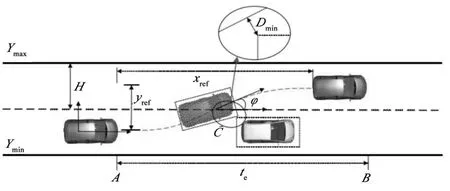
图1 车辆换道避障分析
当行驶中的自身车辆发现其前方有障碍物或者是没有行驶的车辆时,第一步要做的事情就是做出预警,然后伴随着2 辆车的距离越来越近,本身的车辆会减小其节气门的开度,当距离比安全距离小时,会对制动轮缸的压力进行调整,从而降低车速,进而与前方车辆保持安全的距离。
当行驶中的自身车辆发现前方的车辆处于低速行驶的状态,为了保证车辆行驶过程中的安全性,自身车辆会进行制动减速,直到其速度与前方车辆的速度相同。
对于处于高速行驶状态的车辆,采取紧急制动的方式是非常危险的,如果前方车辆突然采取紧急制动,雷达可以迅速监测出前方车辆的速度降低,两辆车的车距迅速减小。这时,自身车辆会马上进行减速,然后轮缸的压力会不断的上升,直到最终能够保持最大的轮缸压力进行减速。
论文中研究的车辆避撞控制策略兼容制动与转向的避撞方式,如果车辆已经采取了制动,但是仍然不可以避免碰撞的发生,还是会通过转向来避免碰撞,在车辆处于高速行驶的状态以及低附着的道路条件时,转向避障所带来的安全效益会更高。
碰撞临界距离对比如图2 所示。
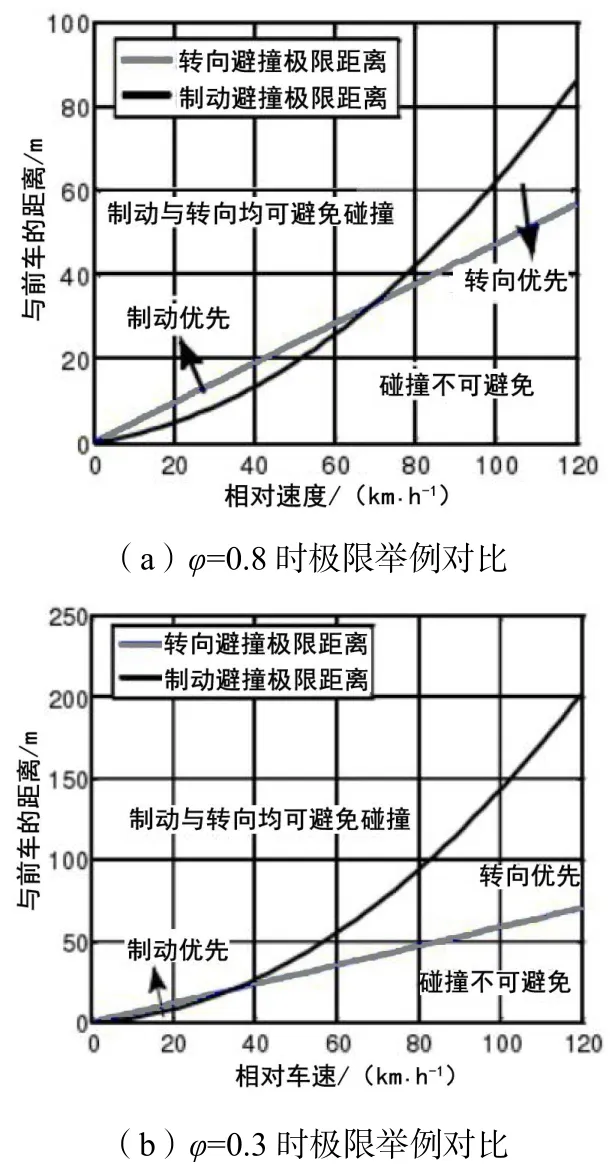
图2 碰撞临界距离对比
由图2(a)可知,在高附着路面条件下,车速低于70 km/h,制动的临界距离会小于转向的临界距离,实施紧急避障应当首先考虑制动。在这个过程中,制动的距离会跟随车速的提升而增加,在车速大于70 km/h 时,转向的距离会更短。所以在汽车处于高速状态时要优先考虑转向制动。从图2(b)中的低附着路面条件采用制动的极限距离以及采用转向的极限距离的对比曲线可以得出,这二者的临界车速是39 km/h。路面的附着条件会对两者的临界车速产生影响,当路面的附着较低时,行驶的速度较高的车使用转向避障方法会更好,同时也可以说明这种条件下采用制动方式的极限距离也会更大。
4 小结
本文设计出的汽车避撞系统既有跟着车辆行驶的功能,同时还具有纵向的避撞功能,当前方的车辆正常行驶时,后方车辆会以前方车辆的速度为依据对自身的速度作出适当的调整,保持好间距。当前方的车辆处于静止、较低的速度匀速行驶以及紧急制动时,后方车辆会根据实际情况来对自身的速度进行调整,从而实现纵向的避撞。
