基于保序回归的X波段天气雷达衰减订正算法
2020-11-10郭春辉袁微王旭白爱娟
郭春辉,袁微,王旭,白爱娟
(1.肇庆市气象局,广东肇庆 526040;2.成都信息工程大学,四川成都 610225)
X波段雷达在探测降水过程中能提供更高的时间和空间分辨率,而且具有天线体积小、易于移动等优点,并在定量估测降水和粒子的相态识别中,有着非常明显的优势[1-3]。但由于X波段波长较短,回波信号衰减问题比起S波段和C波段更为严重,所以有必要对其回波进行衰减订正。Testud等[4]提出了降水廓线订正算法(ZPHI)利用差分传播相移(φDP)进行订正,ZPHI算法是分段进行衰减订正的,但是ZH-Kdp(ZH为水平反射率、Kdp为差分传播相移率)订正法整段仍然使用固定的系数;伍魏等[5]针对X波段双偏振雷达资料先进行φDP退折叠后重算Kdp,采用ZH-Kdp订正法与自适应约束算法对反射率进行衰减订正,结果表明ZH-Kdp订正法效果更好;王晗等[6]采用ZH-Kdp和多点ZPHI的方法多反射率进行衰减订正,结果表明多点ZPHI法优于ZH-Kdp法,ZPHI法的误差主要来源于φDP质量不高;胡志群等[7]比较了φDP订正法和ZH订正法,指出Kdp订正法要优于ZH订正法,但是当Kdp很小时会产生较大的误差,最后提出ZH-Kdp综合订正法,但因ZH-Kdp参数受温度等影响较大,难以使用固定的系数完成衰减订正;毕永恒等[8]在ZPHI等方法的基础上,进行不断调整参数本身,提出了自适应约束方法,该方法能有效改善雷达的衰减,但在远距离处会出现过订正的情况。为了克服单部雷达反射率衰减订正难的缺点,Testud等[9]引入了高分辨率天气雷达(HRWR)重叠网络的概念,可以确定和订正衰减;Katharina[10]提出结合C波段雷达来订正X波段雷达的衰减,结果表明在层状云降水、对流型降水和混合型降水中均得到较好的订正效果。
本研究综合分析了多种订正方法的优缺点,认为仅使用X波段雷达本身进行衰减订正是不够的,拟联合S波段雷达的探测,采用保序回归算法对X波段雷达进行衰减订正。将S波段雷达数据作为标准来评估衰减订正效果,通过平均误差、相关性等参数检验订正算法的性能,并综合对比保序回归算法、ZH-Kdp订正法及自适应约束方法的订正效果。
1 雷达网络及性能指标
肇庆地区安装了两部X波段全固态双偏振天气雷达,一部S波段天气雷达,地理位置及相对距离如图1所示。本研究选择德庆站X波段雷达和S波段雷达作为研究对象,主要参数如表1所示。
2 订正算法

图1 肇庆雷达网络分布图
本研究提出了一种结合X波段和S波段雷达观测数据进行衰减订正的新方法,S波段雷达受衰减影响很小,而且能覆盖X波段雷达网络区域,覆盖X波段雷达网络区域的S波段雷达观测到比X波段雷达更粗糙的时间和空间分辨率的反射率。因此,需要对S波段反射率场进行数据转换[11-15]以匹配X波段雷达极坐标网格,每个X波段雷达像素被分配其中心所在的S波段雷达像素的反射率值。
得到同一网格的反射率值Zs(r)和Zx(r)后(其中Zs(r)与Zx(r),单位均为 mm6/m3,r为与雷达中心的距离(m),下同),定义最大比衰减Kmax(dB)为


表1 X波段与S波段雷达参数
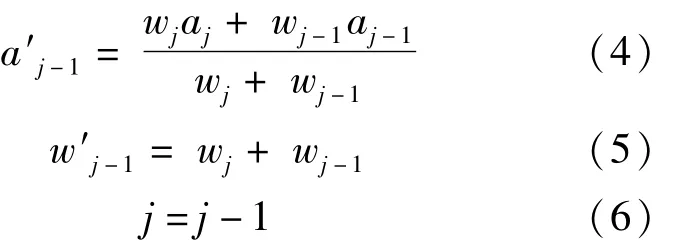
派生的Kmax具有与X波段雷达反射率场相同的数据间隙。此外,由于两个雷达系统的误差,空间和扫描几何结构的时间不匹配,Kmax不会沿着雷达波束单调增加中心到外边界(如图2黑色十字)。理论上,由于X波段衰减的影响比S波段的影响更大,因此与雷达的距离越大,Kmax必须增加(或在没有降水的情况下保持恒定)。为了得到沿每个雷达径向的Kmax的连续单调增加函数,就需要对Kmax进行保序回归[10]。保序回归是统计上最优的方法,以强制单调增加物理约束,与观察的偏差最小。保序回归的概念是计算给定的单调递增函数y值a1,...,an和它们的正权重w1,...,wn,以雷达径向数据作为有限的实数集合,训练一个模型来最小化方程

其中,y1≤y2≤...≤yn。在这项研究中,本研究使用简单的未加权线性序列保序回归,即所谓的相邻最优化迭代算法(PAVA)。在这种情况下,所有权重都等于1。PAVA迭代解决了最小化问题,并且基于以下定理来获得最优解:

如果在迭代的第一步ai>ai-1,违反了此约束,则设置新索引j=i。然后aj与aj-1合并为新值a′j-1,根据以下公式计算新值a′j-1和新的权重w′j-1:
使用a′j-1、aj、w′j-1和wj再次测试式(3)的约束。当满足约束时,保持a′的值及其位置i、i自动加1进入下一个迭代步骤。重复该过程直到不再违反式(3)中的约束。最后,将a′的值分配给函数y中它们对应的位置i。
沿着每个雷达径向和每个时间步长对Kmax进行保序回归。沿着雷达径向的Kmax保序回归后,KIR呈现为单调递增函数(图2中的蓝线所示)。为了获得衰减校正后的反射率dBZXcorr,将该KIR函数添加到实测的径向X波段反射率dBZX中,即

由于在高分辨率X波段实测量中简单地增加了校正功能,因此与S波段测量相比,保持了小尺寸的反射率结构。只有在由于非常强的衰减而导致信号消失的情况下,才需要使用来自S波段雷达的较粗分辨率数据作为填充剩余数据间隙的最佳可能近似值。
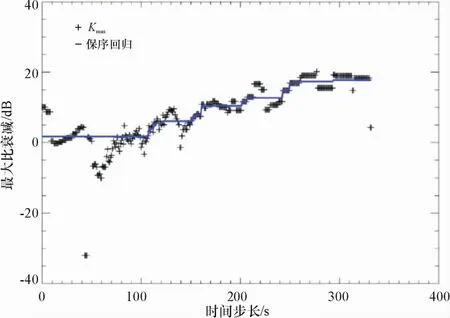
图2 沿雷达径向的K max的保序回归
3 订正结果分析
2019年4月14日肇庆地区经历了一次较强的降雨过程,观测资料 14:30—14:36(北京时,下同)时段的雨区位于S波段雷达与X波段雷达对比的最佳观测范围,选取该时段的雷达数据进行衰减订正分析。
本研究选择X波段雷达3.4°仰角数据进行分析(图3a为反射率产品,图3b为φDP产品),同时将S波段雷达反射率数据匹配至X波段雷达3.4°仰角的极坐标网格中(图3c)。图3a与3c反射率数据进行对比,发现在方位120°E—240°E范围内,X波段雷达发生了强烈的衰减,这一点也可以从φDP值在此范围内出现较大突变得到验证,如图3b红色椭圆框内的红色区域。在两部雷达共同探测区内,靠近X波段雷达,两部雷达都观察到相似的反射率值,但随着距离的增加,X波段雷达出现了衰减直至回波信号完全消失。
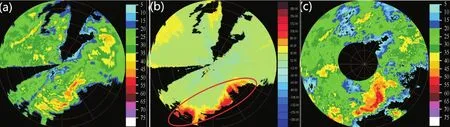
图3 2019年4月14日14:30德庆X波段雷达3.4°仰角反射率产品(a);3.4°仰角φDP产品(b)以及转换后的S波段雷达3.4°仰角反射率(c)
图4给出了由S波段雷达和X波段雷达反射率数据沿X波段雷达反射率场的155°方位角的分布。在30 km以内,X波段雷达受衰减影响较大,观测数据与S波段雷达近似,超出30 km后,X波段雷达受衰减影响越来越大,与S波段雷达探测数据差距也越来越大,最大比衰减量达32 dBz。
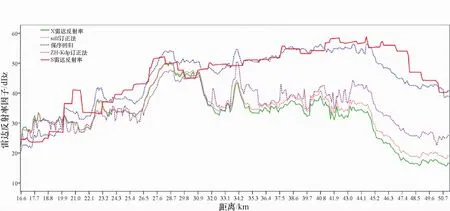
图4 2019年4月14日14:30方位角155°的不同订正结果的反射率因子分布
新提出的衰减订正方法结合了X波段和S波段雷达反射率数据,并且与X波段雷达的校准误差引起的不确定性无关。图5a中的最大比衰减Kmax(由式(1)计算)的场在雷达覆盖区域的外部显示高达20 dB。由于不完美校准的雷达系统和杂波消除,Kmax不是单调递增的函数,随着与雷达的距离增加或甚至可能产生负值(图5a中的数据间隙)。因此,执行式(2)—式(4)的保序回归算法后的Kmax场如图5b所示,其中Kmax随着雷达距离的递增,单调递增至覆盖区域的最高值。然后将Kmax场添加到X波段雷达的dBZ场完成反射率数据订正(图5c)。
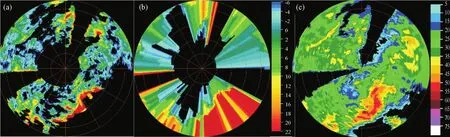
图5 以S和X波段雷达反射率的对数比计算的最大比衰减K max(a)以及保序回归后的最大比衰减
获得的衰减订正后的dBZ场与图3c中关于S波段雷达观测非常一致,如方位120°E—240°E范围。沿保序回归订正的155°方位角的反射率分布在图4中用蓝色虚线表示,它与受衰减影响区域的S波段雷达获得的反射率分布比较吻合,而且保留了X波段雷达观测到的小尺度变化。即使在距雷达较远的高衰减区,也能与S波段雷达观测dBZ近似一致。两个系统之间的平均偏差仅为1.1 dBz,标准偏差为4.2 dB,相关系数为0.88。此外,订正后的X波段反射率场显示了比S波段雷达更多的降水事件细节。
为了检验保序回归衰减订正效果,比较了保序回归订正法、ZH-Kdp订正法及自适应约束算法的衰减订正效果(图6)。从图3a与图6a对比可以看出,反射率场得到一定程度的订正,在方位180°附近尤为明显,比较接近S雷达探测的数据(图5c),但是大部分区域订正后的回波很稀疏,强回波不够集中,主要原因是双偏振量Kdp数据难以控制,质量不佳,导致订正效果不理想。从图6b与图3a进行对比,可以看出回波整体变化不明显,框框内回波还是有订正的痕迹,反射率值有明显变化。但整体变化不大,与S波段雷达探测结果差距较大(图5c)。为了更加直观的比较不同订正方法的订正效果,图4增加了ZH-Kdp法(砖红色虚线)和自适应约束算法(紫色虚线)订正后的反射率数据沿X波段雷达反射率场的155°方位角的分布。从图4可以看出,在近X波段雷达处,衰减较小,与S波段观测数据差异较小,几种订正法订正后的数据也与原始数据近似,随着距离的越来越大,X波段雷达受到衰减的强烈影响,在距离约为30 km处反射率衰减较大,与S波段雷达观测的回波数据差距也越来越大。
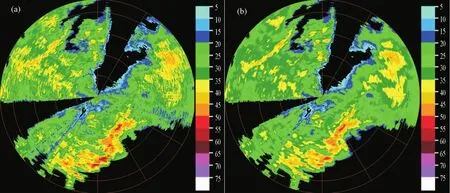
图6 2019年4月14日14:30衰减订正后的反射率场(单位:dBz)
从3种不同订正方法的相关系数及平均误差(表2)可以看出,保序回归算法相关系数为0.88,均高于其它两种订正法,平均误差为1.1dBz,远低于其它两种订正法的结果,可以看出保序回归订正后的回波与S波段雷达具有较高的一致性,达到了预期的目标。
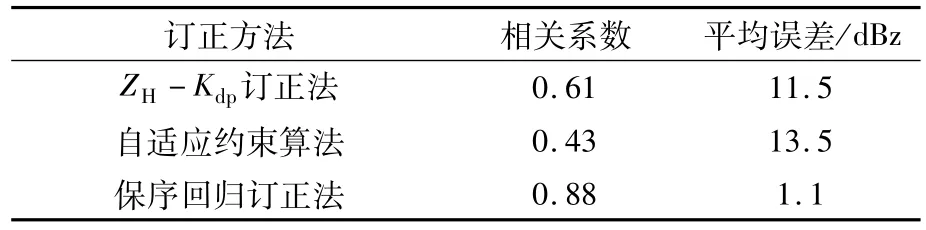
表2 不同订正方法的相关系数和平均误差
为了进一步分析衰减订正的效果,选取方位120°E—240°E范围内降水回波订正前后的反射率散点图(图7)。从图7a中可看出,反射率因子大于35 dBz,绝大部分点分布在对角线的下侧,说明随着回波值增大,衰减越来越严重。图7c较图7b点更集中于对角线,说明ZH-Kdp订正法优于自适应算法,散点图效果不如曲线图4效果明显。图7d是保序回归算法后的散点图,可以看出绝大部分点都集中在对角线两侧,说明订正后的X波段反射率数据与S波段雷达反射率数据保持了较高的一致性,订正效果较好,同时存在一些凌乱、抖动的数据,原因可能是受到雷达标定及杂波等因素的影响。
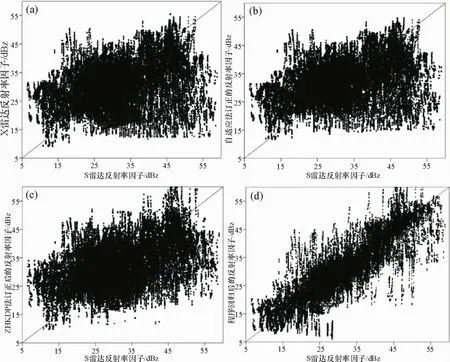
图7 订正前后的反射率因子与S雷达反射率因子的散点图
综上所述,ZH-Kdp订正法及自适应约束算法在远雷达区衰减订正改善很小,而且在大规模强降水或杂波污染的情况下,这种方法会变得不稳定,因此在强雨带衰减的背景下,基于保序回归的订正法更好,能较好订正X波段雷达的衰减回波,与S雷达数据保持较高的相关性。
4 结论
1)X波段雷达受衰减影响大,使得经过强雨带后回波强度变弱,甚至探测不到回波,可以利用共同探测区域的S波段雷达数据对衰减区域进行订正,弥补单部雷达探测的不足。
2)从反射率订正前后回波图对比分析,基于保序回归订正后的回波与S波段雷达回波有较高的一致性。
3)从径向数据曲线图分析,在近距离处,3种订正结果相差不大,说明X波段雷达在降水强度不大的情况下衰减较小;在远距离处,保序回归法的订正效果要优于其它两种方法,订正后的回波更接近S波段雷达回波;而ZH-Kdp订正法优于自适应约束算法,但在远距离处均出现了订正量不够的情况,说明在强雨带衰减的背景下,仅使用X波段雷达本身进行衰减校正是不够的,体现了联合S波段雷达进行衰减订正的优势。