基于支持向量机的车辆换道行为识别仿真研究
2020-11-10杨建坤徐东霞
杨建坤,熊 坚,徐东霞
(1.昆明学院 机电工程学院,云南 昆明 650214;2. 昆明理工大学 交通工程学院,云南 昆明 650500)
换道行为是影响车辆安全行进的因素之一[1]。相关研究表明,驾驶员变换车道会增加交通冲突点产生的概率,甚至引发不同程度的交通事故[2-4]。如果在换道行为初始阶段能够将其识别,并结合换道车辆周围环境,判断继续执行换道行为是否存在事故风险,有风险则进行相应避险操作,从而使得因换道而产生的事故概率降低。
特征参数是换道行为识别模型能否可靠运行的关键因素。早期的研究主要用转向灯[5-6]开启情况识别换道意图,但王畅[7]对大量实际道路试验数据样本分析表明,驾驶人在换道过程中转向灯的总开启率仅为 69.18%,其中部分驾驶人转向灯开启率不足 20%。这一研究结果意味着仅用转向灯开启情况识别换道行为会产生误判。图像识别技术的发展,让基于车道线的识别成了汽车换道预警的主流方法。但此方法在道路标志不清晰或恶劣天气情况下,系统可靠性会降低。现阶段,越来越多的研究者将车辆驾驶操纵数据和运行数据作为特征参数来建立识别模型,并取得了一定进展。KUGE N[8]为这一方向的发展奠定了基础,他将方向盘转角、方向盘转向力矩以及方向盘转向角速度3个特征参数作为识别对象,对避险换道行为、正常换道行为和车道保持行驶3种不同行为意图进行了识别分类。MAR J, LIN H T[9]的研究表明,81.3%的驾驶人在换道行为过程中会有加速或减速行为,尤其在起始阶段。DOGAN U[10]采集了方向盘转角、横向加速度、相对车道偏移量、自车与前车的相对速度距离5个参数作为识别模型的系统输入。结果显示,伴随输入的特征参数种类不断增加,模型识别效果会越来越好。
与此同时,分类算法的选用也是影响模型分类效果的关键。支持向量机(support vector machines,简称SVM)是目前用来研究车辆换道行为识别的“新宠”。DOGAN U[10]开展的试验分别运用前馈神经网络、递归神经网络和SVM进行驾驶员换道意图识别,结果显示SVM的识别效果最佳。熊晓夏等[11]以在环仿真技术下的车辆运动数据为样本输入,并分别用隐马尔可夫模型预测算法和SVM预测算法对危险和正常两种换道进行识别分类。结果表明,在样本数据有限时,SVM的预测效果更好。倪捷[12]通过换道影响的k-means聚类分析结果将换道数据分为危险、安全、舒适等3类,以自车速度、速度差、车间距、纵向加速度为特征参数,运用SVM建立分类模型,模型对危险换道行为的预测准确率达91.1%。
综上分析可知,为提高模型的分类准确率,首先,对特征参数的选取越来越集中于车辆操纵和运行数据方面,并呈现出特征参数选取个数由少到多的发展趋势;其次,SVM在车辆换道行为识别研究等方面效果良好且呈现出不断增长的应用趋势,尤其在小样本分类识别中正在成为主流方法;最后,对换道行为识别的研究从之前的判断换道与否,逐渐深入到了判断换道风险程度如何。基于此,本文试图运用驾驶模拟试验来采集更多的车辆操纵和运行状态方面的特征参数,并通过数据降维方法来选取其中最优的特征参数作为SVM算法的识别对象,从而对安全性换道和风险性换道进行识别分类,以期拓宽这一领域的研究内容及深度。
1 理论分析
1.1 安全换道
假设以下描述的换道过程属安全性换道:首先,车辆跟驰行驶过程中驾驶人产生换道意图;其次,驾驶员结合周围环境对换道条件做综合判断;最后,满足换道条件则执行换道操作至目标车道,并在目标车道上微调至平稳向前行驶。整个换道操作过程平稳顺畅,时空充足,相对安全。
1.2 风险换道
假设以下描述的换道行为属风险性换道:车辆在跟驰过程中,自车的行驶速度高于前车,两车间距离在不断缩短,起初自车没有明显的换道意图或迹象,比如:减速行驶、开启转向灯、转动方向盘等,保持快速行驶一段距离后,突然执行换道操作。这一过程中驾驶人的环境感知及决策时间极短,转向过猛,存在较高的事故风险。
1.3 SVM介绍
SVM是一种监督式分类机器学习算法,在解决小样本、非线性和高维的机器学习问题中优势明显。

图1 最优分类面Fig.1 Optimal classification surface
其基本思想可用图1表示:图中叉形和圆形分别代表两类不同的样本(比如安全换道样本、风险换道样本);中间的实线为区分两类样本之间的最优分类面;外侧两条虚线之间的距离叫做分类间隔;虚线上的点就是支持向量点。
线性可分情况下,假定给出一个样本集:
(xi,yi),i=1,2,…,m,x∈Rn,y∈{+1,-1}。
其中,m为样本个数,Rn表示n维实数空间,x为特征参数(车辆操纵及运行数据),y为样本类别(安全换道、风险换道)。
满足:
yi[(ωTxi)+b]-1≥0。
(1)

(2)
为求得公式(2)的最小值,定义如下拉格朗日函数:
(3)
其中,αi≥0为各样本对应的拉格朗日乘子。
令泛函等于0并对ω、b求偏导,得到相应的对偶函数为:
(4)
由公式(4)可求得拉格朗日乘子αi。
SVM非线性分类的原理和线性分类一样。对于非线性问题,支持向量机的优势在于可以将低维空间的训练样本通过核函数K(xi,xj)映射到高维特征空间中求线性分类面,则最优分类面的目标函数为:
(5)
由于高斯核函数的映射能力较强,所以选取它为核函数,则:
(6)
一般认为车辆换道行为表征参数与换道类别之间存在非线性关系,所以最终用如式(7)所示的决策函数来对不同的车辆换道行为类别予以区分:
(7)
2 试验方案简介
试验采用昆明理工大学交通工程学院自主研发的驾驶模拟系统[13]为仿真平台。将试验虚拟道路场景设为双向两车道,设计车速为80 km/h,前车均设置为60 km/h,模拟驾驶安全换道时受试者行车速度与前车接近,模拟驾驶风险换道时受试者行车速度接近70 km/h。驾驶模拟操作场景如图2所示。
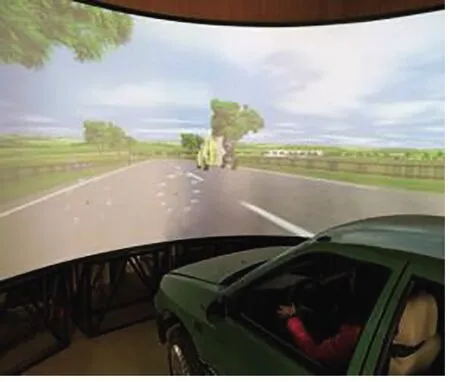
图2 模拟驾驶场景Fig.2 Simulated driving scenario
选取已取得合法驾驶证照且驾龄在2年以上的10名受试者,其中男性6名、女性4名,年龄在25~35岁之间。驾驶试验前有5 min的试驾时间以适应虚拟驾驶环境和操作,正式试验过程中工作人员不做任何提醒。
模拟系统以50 ms为间隔,实时动态生成模拟驾驶操纵及运行数据,试验采集了10个参数,作为特征参数的提取范围。它们分别是:方向盘转角(W)、油门踏板开度(G)、横向速度(Vx)、横向加速度(Ax)、纵向速度(Vy)、纵向加速度(Ay)、横摆角(Y)、横摆角速度(Yv)、侧倾角(Z)、纵倾角速度(Pv)。
3 时间窗和特征参数确定
时间窗过短,则其包含特征信息不足;时间窗过长,其所包含弱相关信息过多。模型的识别率和实时性均得到满足的时间窗性能较好。
3.1 时间窗范围界定
图3和图4分别是由安全换道、风险换道模拟试验采集的方向盘转角拟合情况。
从中可以看出,风险性换道较安全性换道行为过程,所用时间较短,安全换道时间为3 s左右,风险换道时间为2 s左右;它们对应的方向盘转角的变化幅度也有较大区别,安全换道的方向盘转角幅度在[-20,+25],而风险换道的方向盘转角幅度却在[-80,+80]。
时间窗范围的设定应该接近换道操作及执行所需时间。考虑到换道预警系统的设计需要给驾驶员预留出一定的反应操作时间,时间窗的起止时间应比换道起止时间适当提前。
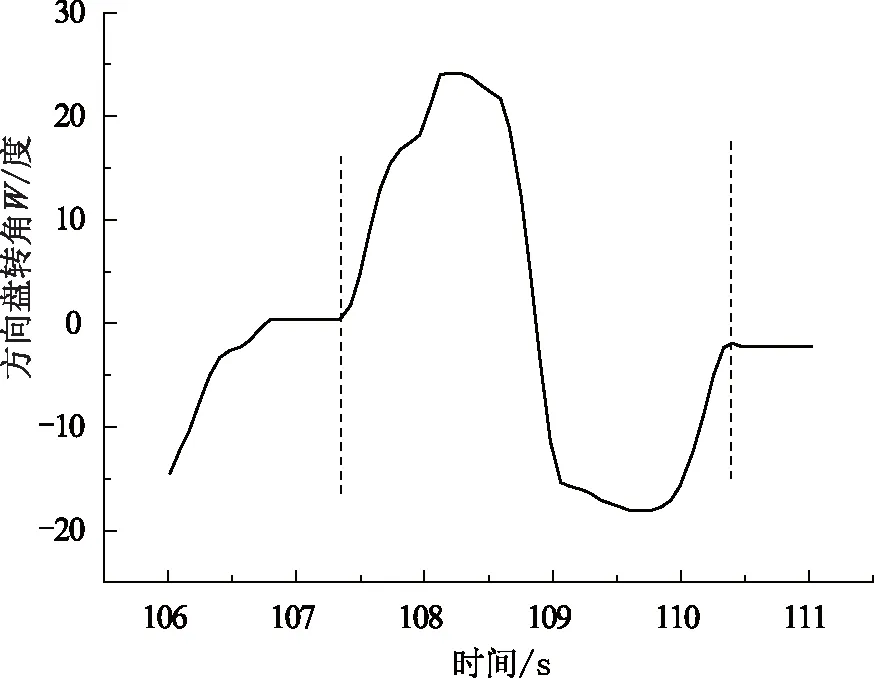
图3 安全换道数据拟合Fig.3 Data fitting of safety lane-changing

图4 风险换道数据拟合Fig.4 Data fitting of risky lane-changing
另外,因个人差异,换道起止时刻存在一定程度的随机分布特性。综合这些原因,本文将换道行为起点设置为时间窗的中心点,并以该点向前向后各取3个相同时间段(0.5 s、1 s、1.5 s)形成3个时间窗(1 s、2 s、3 s),后续将对比分析,确定其中一个作为模型的时间窗。
将原始模拟数据进行标准化处理,并从中分别截取3个不同时间窗下的车道保持、安全换道、风险换道3类样本数据,其标签分别定义为0、1和-1。
3.2 确定时间窗
在MATLAB环境中,运用LibSVM 工具箱建立换道分类模型,SVM算法模块已内嵌在了LibSVM 工具箱中,由于LibSVM工具箱自带的多分类器采用“车道保持、安全换道,车道保持、风险换道,安全换道、风险换道”一对一的分类策略,所以训练样本输入后得到车道保持、安全换道、风险换道3个训练模型。再把测试样本输入经训练后的模型,得到模型对测试样本的分类情况。测试样本的定义标签与模型分类结果相同的数量越多,则模型的分类准确率越高。
分别用3个时间窗训练样本数据输入系统后得到训练模型,随后将对应的测试样本输入训练模型,其预测结果如表1所示。由表可知,2 s、3 s时对应的分类准确率分别为96.8%、97.8%,大小很接近,但不难看出,时间窗1~2 s间的分类准确率增幅远大于2~3 s间的分类准确率增幅。由于后者牺牲了1 s时间,但分类准确率的提高却非常微小,故最终确定2 s为最优时间窗。

表1 模型分类准确率Tab.1 Model classification accuracy
3.3 确定特征参数
特征参数是表征车辆不同换道行为的关键,其种类太少则涵盖的换道信息太少,太多则有效的换道信息容易被淹没。使用逐步回归分析对2 s时间窗下的样本数据进行降维处理,从10个运行参数中,提取对识别模型贡献度较大的参数作为特征参数。
先用因变量对每一个预测变量做回归,然后以对因变量贡献最大的预测变量所对应的回归方程为基础,再逐步引入其余预测变量,使最后保留在模型中的预测变量既是重要的,又没有多重共线性。用SPSS软件进行统计分析,得降维后的特征参数回归系数如表2所示,统计角度认为P值小于0.05,则预测变量对因变量有显著影响,故取了纵向加速度(Ay)、横向加速度(Ax)、横向速度(Vx)、纵倾角速度(Pv)、横摆角(Y)、横摆角速度(Yv)6个特征参数。
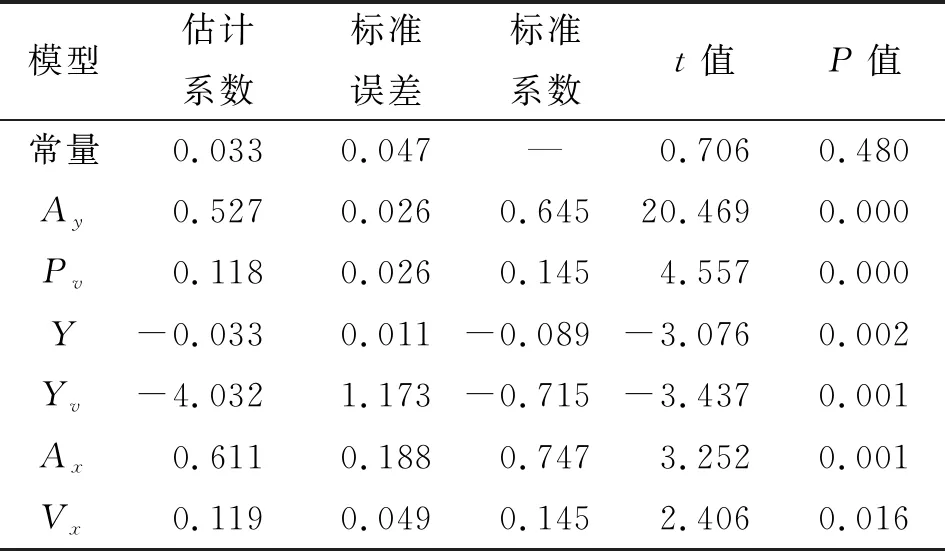
表2 回归系数Tab.2 Regression coefficient
4 模型预测结果
确定了时间窗和特征参数后,将94个测试样本输入分类模型进行预测,模型预测结果如表3所示。

表3 模型分类预测结果Tab.3 Results of model prediction
模型在94个测试样本中,准确识别出87个,整体分类准确率达92.51%。其中,在31个风险性换道行为预测样本中识别出29个,分类准确率达93.56%;在32个安全性换道行为预测样本中识别出31个,分类准确率达96.88%;在31个车道保持预测样本中识别出27个,分类准确率达87.09%。该模型能较精确地识别出不同类型的车辆换道行为,能较好地判断出动作猛烈迅速的风险性换道行为。
5 结束语
时间窗大小和特征参数选取对分类模型的识别效果有影响。基于驾驶模拟操纵及运行数据,界定了时间窗范围,并确定了2 s为模型时间窗;扩大了特征参数选取范围,并用数据降维法确定了其中6个特征参数;最终得到分类模型的分类准确率达92.51%,能有效区分车道保持、安全性换道和风险性换道,达到预期目的。
然而,本文对换道行为作分析时对安全性换道和风险性换道还停留在描述性的区分层次,区分界限较为模糊。今后可考虑用量化模型或机器学习的聚类方法更精准地区分两者,为换道行为风险识别模型的完善奠定基础。另外,SVM算法自带的可调参数也可能对模型识别效果存在影响,后续工作可尝试用不同寻优算法对其进行优化。
