基于连体段的印刷维吾尔文特征提取
2020-11-10贾钰峰章蓬伟贾园园邵小青刘茂霞
贾钰峰,章蓬伟,贾园园,邵小青,刘茂霞
(新疆科技学院 工商管理系,新疆 库尔勒841300)
0 引 言
关于维吾尔文印刷识别方面,相关的研究文献资料较少。 但维吾尔文与阿拉伯文很相似,参考了阿拉伯文及相关印刷识别方法[1-2]:典型的识别系统模块是由预处理、特征提取、训练模型、识别器组成的,如图1。 由维吾尔文的特点得知:印刷的文字切分不论以笔划,字母还是词,切分都是相当困难的[3-5]。 同时还有图像文本躁点等因素影响,如:粘连,断裂,伪字母切分等。 基于连体段(WordPart)[3]的段切分是一个很好的解决方案。 它能够保留出整体的完备信息,从而为提取良好的特征做准备。 本文在已经预处理的基础上,对连体段提取各类特征。
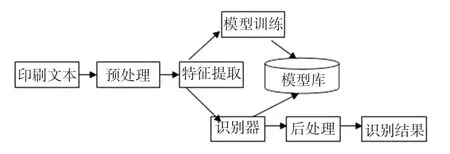
图1 印刷维吾尔文识别系统框架Fig. 1 Printed Uighur recognition system framework
1 维吾尔文的特点
维吾尔族的语言属于阿尔泰语系突厥语族。1938 年形成现行文字,有32 个字母拼音自右向左横写,且有120 多个字符形式,以词的形式表达[6]。其部分特点如下:
(1)维吾尔文字母包括主体部分和附加部分,其中20个字母有附加部分,它的形式为一“”、两“”、多“”、以及“”、“”等。附加部分在主体笔划的内部、下面或上面。如:、、、、、等。
(2)维吾尔文的单词是由多个或者单个字母组合而成。 根据书写规则这些字母的组合形成一个或几个前后相连接的音节或称连体段。 连体段中的字母,在印刷的时候总是沿着水平线的,这条水平线被称为基线。 维吾尔文的结构详情见图2。
2 特征提取
特征提取的过程就是将图像文本映射到文字独有的特征空间,以便压缩信息量,方便后续的分类、训练和识别。 本文根据维吾尔文的特点,基于连体段提取出一系列常用特征,并最终建立一个特征库以备使用,现将方法介绍如下:
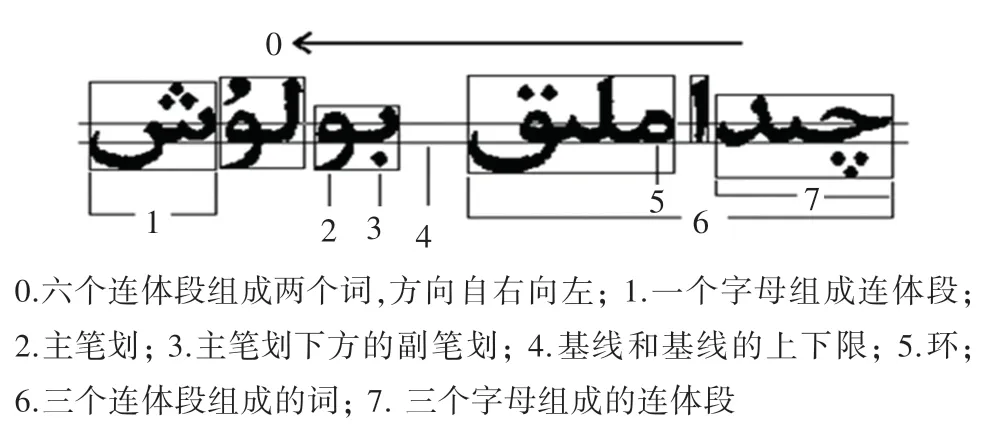
图2 维吾尔文结构特点说明Fig. 2 Structural features of Uighur
2.1 笔划位置特征
维吾尔文中连体段由主体部分和附加部分组成。 由图2 可知附加笔划在主笔划的下面、上面或内部。 笔划位置特征就是求出主笔划,副笔划个数,副笔划与主笔划的相对位置关系。 副笔划的位置特征可以通过与基线的相对位置来识别。 但有些特殊情况无法完美判断,如与。故介绍一种基于联通域的更细致的判别方法:
选定一点作为一个种子,由图像的区域生长法[7-8]可以求得一个相同像素相互联通的区域(即笔划)。 因此根据种子点就可以知道联通域,根据联通域就知道连体段笔划的数量。 根据图像像素点读取的顺序,位图行内是由左往右,行间由下往上。将二值图像扫描时第一个碰到的黑色像素作为种子,再由区域生长法生长蔓延出一个笔划区域,得到一个笔划。 为了防止重复计算笔划,将已经蔓延过的笔划反色(使笔划和背景同色)后继续循环寻找下一个种子点,继续生长蔓延找到下一个笔划,直至图循环完毕。 该算法主要步骤:
(1)为了不破坏原图,复制初始化为连体段图像的缓冲区两个(设为A 和B)。
(2)对A 图像域按由左往右,由下往上的方式依次扫描像素点。 碰到黑色像素点就作为种子点记录下来。
(3)由区域生长法得出此联通域。 在区域生长同时统计黑点的个数并记录黑点的坐标(黑点总个数为连体段的面积;坐标的平均值可以用来判断笔划的位置关系)。
(4)根据记录的黑点坐标,把B 图像域相同坐标处像素值反色(白色)。 此时B 域就是除去联通域剩下的部分。
(5)将B 域的像素值覆盖掉A 域。
(6)重复步骤(2),(3),(4),直至循环完毕。
由此算法可统计出连体段的联通域个数,即笔划数;其中面积最大的为主笔划。 其它笔划的平均纵坐标与主笔划比较,就可以判断出副笔划的上下位置特征。 同理副笔划之间的平均横坐标可以判断出副笔划之间的左右位置特征,而这些特征都是全局精确特征,可以显著提高识别分类效果。 连体段笔划位置特征提取步骤如图3 所示。

图3 连体段笔划位置特征提取步骤Fig. 3 Stroke position feature extraction steps of wordpart
其特征结果如下:
(1)笔划数为8 个。 面积分别为:15,16,16,815,14,82,14,16。 最大面积即主笔划面积为:815。
(2)位置特征由下往上依次为:-16,-11,-11,0,-11,13,13,15。 其中0 代表主笔划;小于0 的共4 个,代表在主笔划下方;大于0 的共3 个,代表在主笔划上方。
(3)同时还可以知道副笔画之间的位置关系。
2.2 孔洞数
连体段孔洞数也是基于联通域个数的[7]。 为保证孔洞数目准确性,将图像黑白像素调换后继续递归循环算法对不是笔划的区域进行联通域个数计算,如图4 所示,可得到总的不是笔划的连通区域个数,减去和边界相交的背景区域,就可以得到连体段孔洞数数量这一特征。 这也是全局精确特征。 此特征在后续使用中发现非常高效。

图4 黑色联通域共有3 块 孔洞数共有2 个Fig. 4 There are 3 holes in the black connecting area and 2 holes in total figure
2.3 方向码
方向码特征是字符识别中非常经典有效的特征,方向码就是把平面分成八个方向[9-10],如图5 所示。 取出主笔划的轮廓,在轮廓上选取一个开始点和一个结束点作为一个线段,并判断这个线段归属于那个方向,然后用方向序号标识。 继续重复直至循环轮廓一周后得到一组方向特征向量,这组向量就是主笔划的方向码。 它具有较高稳的定性和抗干扰能力,代表主笔划的形状特征。 方向码特征提取过程为:求连体段轮廓,点聚类,直线逼近,得出方向码。
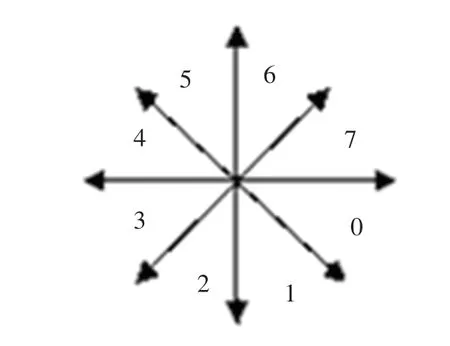
图5 八方向示意图Fig. 5 Eight direction schematic diagram
(1)取轮廓。 取轮廓使用边界跟踪法,从图6 得到主笔划,从主笔划选取种子点,顺时针环绕主笔划边界一周后得到连体段的轮廓[7-11]。

图6 连体段原始图像Fig. 6 Original image of wordpart
主笔划轮廓选取算法如下:
定义初始搜索方向为左上方,搜索到的第一个黑色像素作为轮廓种子点,找到下一个黑色像素,记录边界点坐标和个数。 找不到就顺时针旋转45°继续寻找直至找到下一个点。 重复以上方法直到返回最初起始种子点为止。 轮廓像素点个数就是周长特征,坐标点就是主笔划的离散形式。 用此方法取得的轮廓如图7 所示。

图7 取出轮廓的连体段Fig. 7 Take out the wordpart of the contour
(2)点聚类。 如隔几个像素点取一个点,使轮廓点稀疏。 但点聚类依然不够简化。
(3)直线逼近。 在尽量保留拐点、关键点的情况下,仍对轮廓进行进一步的简化采样,将轮廓变为保持原有形状的折线,如图8 所示。

图8 直线逼近后的连体段Fig. 8 The wordpart after the straight line approximation
在这里我选用了经典的Douglas-Peucker 算法[12]实现直线逼近功能,其算法描述如如图9 所示。
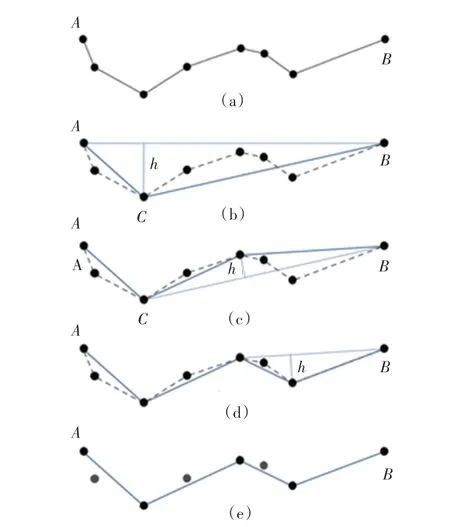
图9 Douglas-Peucker 算法描述过程Fig. 9 Douglas Peucker algorithm description process
①在曲线AB 之间连接一条线段AB,线段AB 为曲线的弦,如图9(b)所示。
②求出曲线上离线段AB 距离最远的点C,计算其与线段AB 的距离h。
③若h 小于预定阈值,则该直线段AB 作为曲线的近似,该段曲线AB 处理完毕。
④若h 大于预定阈值则,利用距离最远的C 点将曲线AB 分为两段AC 和BC,线段AC 和BC 重复步骤1 到3,直至处理完毕,如图9(c)和图9(d)。
⑤依次连接各个最终确定的逼近点作为连体段的近似轮廓,完成简化采样,如图9(e)。
(4)得出方向码。 根据笔划骨架中每一段线段归属的方向得出方向码特征向量。
图8 的方向码特征向量为(假设阈值为3,具体根据字体大小判断):4,5,5,6,1,0,0,0,7,5,5,6,0,1,0,6,1,7,5,6,0,1,2,3,3,4,2,3,3。 若将每个方向的个数求和,则方向码向量降维为:6,4,1,3,5,4,2。
2.4 尾点、交叉点
尾点与交交叉点作为细化后字符识别提取的常用特征已被广泛使用[13]。 前人已经研究了各种经典的细化算法,经过论证,本文采用细化算法提取此特征,得到了较好的效果[7]。 在细化后的连体段图像中,交叉点一般都是在当前点的8 邻域模板中,即以当前点p 为中心选择一个3×3 的模板来判别其尾点、交叉特征属性。 计算P 点的交点数的公式(1):

模板如图10 所示。
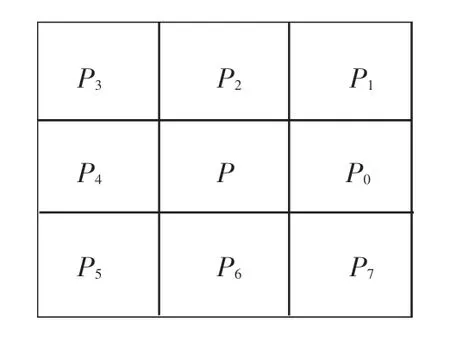
图10 8 邻域模板Fig. 10 8 Neighborhood templates
其中, SUM 表示当前点8 领域中像素点的个数。 NUM 表示当前点P 的8 领域模板中像素值的0,1 变化次数。 由算法可以判定出:
(1) 当NUM = 2,SUM = 1 时,P 为尾点;
(2) 当SUM >3 时为交叉点。 其中,NUM =6,SUM =3 时,P 为三叉点;NUM =8,SUM =4 时,P 为四叉点。
图11 为图3 的主笔划细化后的情况,共有尾点、三叉以上点各6 个。
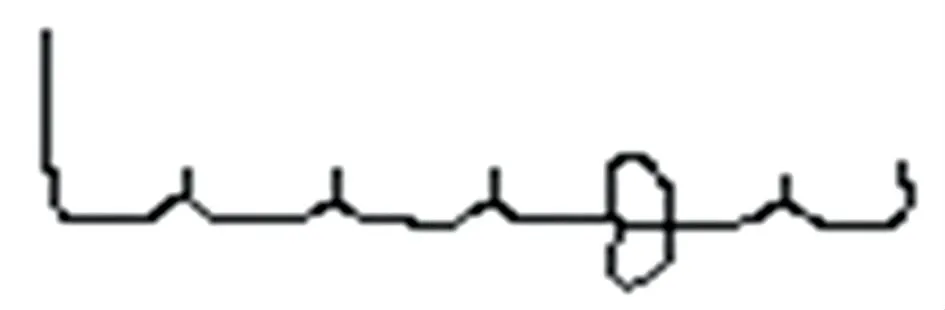
图11 细化后的主笔划Fig. 11 Main stroke after thinning
2.5 前后景比值
前后景比值特征是基于统计,计算出连体段矩形框中黑像素和与白像素的比值[14]。 这样提取特征的优点在于计算简单,不受字符大小的影响,只要字形固定,对于印刷体就可以作为特征,如图12 的前后景比值为0.25。 另外,印刷体维吾尔文连体段具有一定的高度和宽度,计算连体段高宽比特征值,如图12 宽为60,高为56,宽高比:1.071。 前后景色比值结合连体段宽高比,可以作为联合特征,针对部分连体段可获得较高的稳定性和抗干扰性。
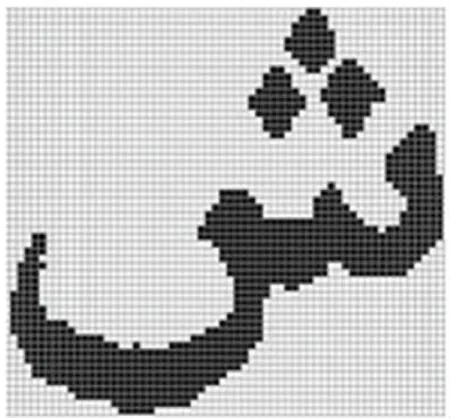
图12 连体段的像素模型Fig. 12 Pixel model of wordpart
3 结束语
本文重点表述了维吾尔文连体段常用特征提取方法。 在分析维吾尔文书写特点的基础上提取了如下特征:宽高比,前后景比值,孔洞数,尾点,交叉点,方向码,笔划位置特征。 基于以上方法通过对四十多对样张进行批处理,建立起了基于连体段的特征库图14 为对图13 从右往左提取连体段相关特征的截图。

图13 原始样张部分截取Fig. 13 Part of the original sample
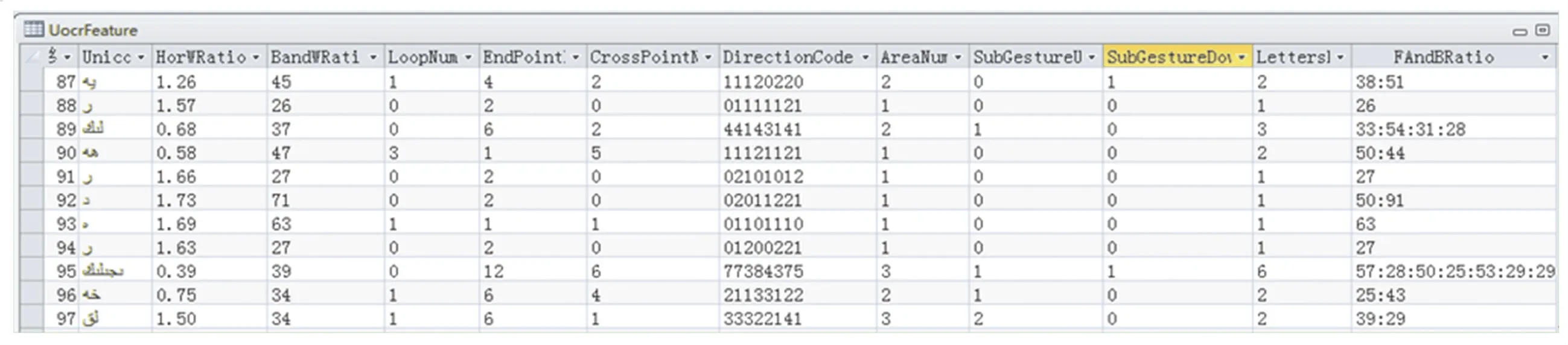
图14 特征库截图Fig. 14 Screenshot of feature library
图14 为特征库的截图:从左往右每一列的特征分别为:连体段Unicode 码,高宽比,孔洞数,尾点数,交叉点数,压缩后的8 方向码,笔划数,基线上方副笔划数,基线下方副笔划数,连体段字母个数,前后景比值等。
将特征应用于维吾尔文字印刷识别系统,由识别器识别后证明所采用的算法思想和特征维度是有效的。 但还需要进一步完备连体段的有效特征,以便抽取出那些对不同类别最为重要的特征,组合成良好且优秀的特征组合。 后续还需要研究局部特征和全局特征合并训练的方法,完备字符特征集合,改进特征选取准则函数,结合分类器的改进,尽可能的提高识别率[15]。
