街道空间步行适宜性测度与设计导控*
——以上海静安寺片区为例
2020-11-09潘海啸SHIChengYUANQiPANHaixiaoYEYu
施 澄 袁 琦 潘海啸 叶 宇 SHI Cheng, YUAN Qi, PAN Haixiao, YE Yu
1 宏观背景及概念解析
1.1 街道空间品质重塑浪潮迅速兴起
我国新型城镇化建设从重视增“量”转向关注提“质”。街道作为慢行交通的主要载体和重要的城市公共空间组成部分,其空间品质所受重视程度不断提升。作为与居民日常生活关系最为紧密的线型活动场所[1-2],高品质的街道空间既可以促进社会交往与实体经济以支撑城区活力,又能鼓励居民日常体力活动,从而提升整体公共健康水平,还可以缓解交通拥堵及相应的环境污染等城市问题[3-6]。
随着街道空间品质的重要性成为共识,伦敦、纽约、上海等全球大城市均发布了品质导向的街道设计导则[7]26,[8]。对人本尺度空间品质追求的深化也使得街道空间的概念得到相应的扩充:不仅关注街道本身,还重视影响街道活力的近人尺度空间要素,如沿街底层商铺、开敞空间以及街道服务设施等[9]37,[10]107。街道空间的品质需求已经从“交通效率优先”转变为“空间品质先导”,街道更新设计也从单一的“道路红线管控”向全面的“街道空间界面管控”转变。这些需求的转变对用地紧张、亟需提升品质的旧城中心区街道更新提出了精准性、多维度、可操作的要求与挑战。
1.2 街道步行适宜性概述
随着当前城市更新与设计进入以品质提升为主要任务的新阶段,步行适宜性这一受街道空间特征强烈影响的主观感知日益成为街道空间品质的核心内涵之一。步行适宜性是市民在街道空间中日常行走时感受到的可步行性评价[11]26,其与广义的街道可步行性概念有所区别,并不包含街道组构、城市功能组织等中观和宏观层面,而是在各类街道空间与界面特征要素的影响下行人所感受到的宜步行程度,是对于街道空间界面步行品质的一种反映[12-13]。
在空间品质提升的大背景下,如何将人们的日常生活行为合理纳入传统以承载交通功能为主的街道中去,针对特定类型的街道空间步行适宜性引入设计评估并制定导控策略,成为街道微更新设计实践中首当其冲的问题。如何精准测量行人的主观感知要素,并科学开展微更新与品质提升已成为设计实践中的典型难点。现有街道空间的研究工作大多隶属于定性研究范畴,量化研究比例相对偏低[10]108;而且新近涌现的空间品质量化研究更多地关注高品质街道空间特征的描述与归纳,而较少关注具身性的步行适宜性感受[14]。旧城中心区建设密度高、腾挪空间小的特点进一步限制了街道更新与步行适宜性提升的可操作空间,更加需要立足公众感知的精准分析和设计预评估。
城市设计的精细化转型和旧城中心街道空间形态的限制,需要更为细致的空间感知与行为研究和分析的工具来回答“行人如何感知街道空间,而街道空间环境又以何种程度和方式影响行人的适宜性感知”这一问题,从而更精确地辅助设计实践。近年来,信息技术进步所催生的多源数据和智能化算法,正在推动城市设计在数字化领域的迅速发展与深化。可视化陈述性选择偏好法(Stated Preference,即SP法)、虚拟现实、机器学习等新技术在建成环境研究中的兴起,有望在可控的实验室环境下提供多个场景的沉浸式感知体验,从而便于精细化、高效地比较和评估,避免实地体验和行为观测中的偶发因素干扰。具体而言,虚拟现实不再需要昂贵的设备,而可以由“Oculus Rift”和“HTC Vive”等为代表的头戴式显示器,以光辉城市(MARS)等为代表的虚拟环境平台实现。可视化SP调研法以图片或者场景呈现的方式直观展示街道空间环境,弥补了传统调研依赖语言与文字而容易导致的结论信度问题。机器学习相较于传统线性回归等方法能更精准、高效地处理复杂建成环境中空间要素的非线性关联效应。
上述一系列新技术的进步使得基于虚拟现实技术开展街道空间中的感知品质研究更加简便易行,进而为实现更加客观、准确的步行适宜性测度和精准的街道更新设计提供可能性[15-16]。
2 研究现状及发展动态
2.1 街道步行适宜性研究仍相对匮乏
近年来,如何提升城市空间的步行适宜性成为城市设计领域的关注热点之一,已有了相当数量的研究。在理念上提出了共享街道(Shared Street)、完全街道(Complete Street)等指标概念,在评价上提出了步行指数(WalkScore)等一系列量化评估体系,在操作上提出了相应的技术工具箱与设计导则[17]65,[18]21。现有研究主要关注城市整体功能组织[2]12、城市肌理与路网组构[19]21,[20]、设施可达性[21]等城市或街区尺度上的可步行性,而针对街道空间界面这一微观层面上行人所能感知的步行适宜性来开展的定量化研究则相对较少。虽然街道空间界面的步行适宜性高低可以由设计师根据经典理论和个人经验做出大致判断,且目前也有部分运用传统环境行为学方法针对街道界面要素所开展的宜步行性测度分析[22]24,[23]104,但这些都难以满足人本视角下系统化、精细化的城市设计需求。
2.2 基于离散选择模型的可视化SP法与沉浸式虚拟现实技术在建成环境研究中的兴起
离散选择模型(Discrete Choice Models)作为因变量不连续情况下的统计模型,在多个领域得到广泛运用[24]。其中,可视化SP法通过受访者陈述其个人偏好开展分析,数据获取成本较低,而且能通过实验设计限定选择集以避免环境属性多重共线性。近年来,为了更直观地表现多样化的建成环境要素,图片展示多选项要素的可视化SP法逐渐兴起。这种方法易于获取大量受访者的偏好数据,相较于小样本专家打分法更具普适价值。然而,可视化SP法运用于街道空间界面仍面临操作问题。首先,既有研究往往以轴测方式呈现街道空间,缺乏人眼视角的实际场景展示。其次,街道空间及界面要素众多,若简单地将各街道空间界面要素直接进行正交设计(Orthogonal Design)来生成问卷会输出过多问卷选项,调研中难以操作。因此,既有研究往往通过研究者的个人经验进行选项筛选。这一过程较强的主观性和随意性削弱了研究信度。
虚拟现实(Virtual Reality)是指通过计算机模拟产生一个三维的虚拟世界,为使用者提供身临其境的感受体验技术[25]73,[26]230,[27]153。近年来虚拟现实技术逐步向建筑与城市设计领域扩散,较好地解决了可视化SP法的上述不足,两者的结合为建成环境研究带来新的可能。低成本的头戴式显示器与可快捷构建的街道场景实验方式,能够排除以往街道空间品质研究中存在的诸如光线、噪音等多种不可控因素的干扰,从而获取被试者对于步行适宜性的选择偏好,实现更为客观、准确的步行体验调研。国内外学者均对此开展了探索性研究[26]228,[27]152。
2.3 小结
综上所述,对于街道空间界面各要素进行步行适宜性影响权重的量化测度已成为主要趋势,量化分析的引入也取得了相较传统的定性讨论更为深入的成果。近年来计算机硬件与图形技术的不断进步以及虚拟现实技术向小型化、低成本方向的不断发展,为建成环境领域研究提供了新的可能性。而可视化SP法、虚拟现实、机器学习等新技术、新数据的不断涌现使得研究具有了运用“新数据和新方法”来更深入地回答这一“老问题”的可能。
3 研究实验设计
3.1 街道步行适宜性的概念分解与要素界定
步行适宜性作为一种与空间特征关联紧密的主观感知,可以从街道空间视角进行解读与界定。本文所关注的街道空间是指垂直方向上以街道两侧的临街建筑外墙为界,水平方向上以建筑临街区和道路共同围合所形成的空间界面。基于尤因(Ewing)等[17]65,[18]23学者的经典研究,本文初步界定了在街道空间界面中与步行适宜性紧密相连的5个关键品质维度:围合感、透明度、多样性、人的尺度、意向性,并基于国内相关学者的实证研究[7]26,[22]24,[23]104,补充了交通流量这一维度,共形成6个品质维度、13个特征要素,同时对其具体的操作和量化方式进行定义(见表1,图1)。
(1)交通量。交通量既关注人流量也关注机动车流量,是指交通流在何种程度上满足行人步行适宜性的需求,交通流量过高影响个体步行空间的独立完整性,且容易引起擦碰;过低则缺少街道活力,甚至让行人感到不安全。
(2)围合感。街道的围合度会影响行人对街道空间尺度的感知,由于街道空间主要在断面方向上有明确界限,因此街道空间的围合感知常基于街道宽度与两侧建筑实体高度的比例关系以及人的视觉特征展开。雅各布斯(Allan Jacobs)[11]16认为街道高宽比越小,街道的围合感越强,越大则围合感越弱,适宜值介于1: 1—1: 3之间。
(3)透明度。建筑底层临街面透明度决定了街道与建筑、室外与室内活动之间的交流程度,代表了街道界面的“深度”,较为透明的界面方便行人观察室内空间,从视觉角度扩展了原有的街道空间,并且能增加行人的逗留活动意愿。
(4)多样性。多样性对于多元街道生活具有积极意义。丰富的建筑色彩可以增强街道的视觉体验,种类繁多的商业内容可以满足行人的不同消费需求,高密度的街面单元与出入口为街道空间提供了充分的内外交流点和丰富的步行环境[19]21。
(5)人性尺度。街道的人性尺度关注为行人提供疲惫时的休憩设施、缓解心理压力并增强美学感知的植被树木等自然资源、保障行人步行安全、缓解人车矛盾程度等满足行人基础步行需求的街道空间要素。
(6)意向性。意向性是能够引起观察者强烈形象感的物质环境品质,高度意象化的城市空间应形成良好的结构组织并包含丰富的空间要素以方便行人识别。因此,地标和场所感是可意向性的关键组成部分[28]。
3.2 研究设计
研究实验设计主要分为要素选取、场景搭建、数据采集、统计分析和设计导控5个部分(见图2)。

表1 街道步行适宜性的概念分解与相关要素界定Tab.1 The concept of street walkability and definitions of relevant components

图1 街道空间基本构成要素示意图Fig.1 Basic elements of street space
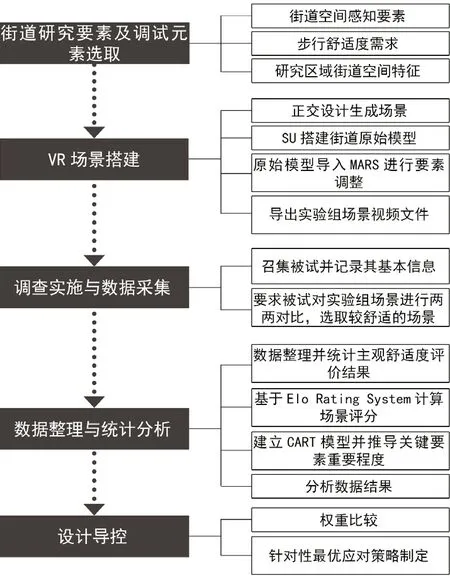
图2 实验设计流程示意图Fig.2 Analytical framework
首先,根据旧城中心区较为典型的街道特征选取街道关键品质维度中应优先考虑的街道空间要素及调试元素,并选取与品质维度最契合的街道进行相应街道要素的实验。
其次,进行虚拟现实场景搭建,基于正交设计对调试要素进行排列组合并生成街道场景信息。场景建模基于Sketchup开展,利用研究案例街道开展的实地测量获取精细化的各类街道空间特征数据,并实地采集各类贴图和纹理,以再现逼真的环境。通过光辉城市这一建筑VR软件(Mars)实现将模型场景向沉浸式虚拟现实环境的转化。光辉城市可直接导入Sketchup格式数据并转化为虚拟现实场景,较之Unity等以往常用的平台更为高效。
再次,进行实验数据采集,各街道实验召集25—30名被试者,并要求被试者选出每个实验组中步行适宜性较高的场景。绝大部分被试者具有建筑及城市规划专业背景,并通过实验前的需求讲解和预实验测试保证评价口径的统一。具体操作上,每位被试者会先听取相关评价口径的讲解,并以1—2个随机场景作为预实验,通过讨论进一步明确判断标准,提升评价的一致性。每人在每个场景中漫步30—60 s,当被试者表示可以后切换到下一场景(见图3)。该实验使用的设备为HTC VIVE头盔。
最后,对实验数据进行整理与统计分析,并根据数据结果制定针对性的设计导控策略。
3.3 研究范围
本文选取上海市静安寺周边4条具有代表性的旧城生活性街道,并从中截取部分功能定位较为明确的街段作为实验范围,包括交通支路型街道愚园东路、商业型街道愚园路、生活服务型街道陕西北路、综合型街道乌鲁木齐路(见表2)。每条街道围绕不同的关键空间品质维度开展具体场景设计,每个街段实验选取6—7个被选场景,形成10—15个实验组,通过统计各街道被认为步行适宜性更高的场景被选频次,获取行人对街道步行适宜性的主观评价数据。

表2 实验研究街道范围基本信息Tab.2 Basic information of the street scope in the experimental study

图3 实验现场Fig.3 Representative photos of the experiment site
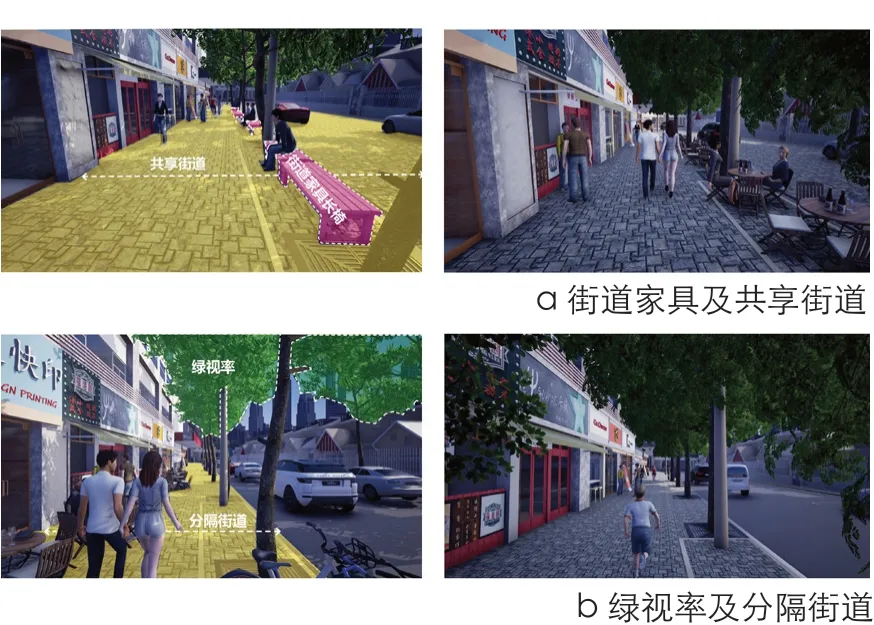
图4 愚园东路被试元素示意图Fig.4 Street elements analyzed in East Yuyuan Road. Up: street furniture and shared streets; below: green visibility and divided streets
3.3.1 愚园东路实验
愚园东路街道场景关注人性尺度品质维度的街道家具类型、位置和绿视率对步行适宜性的影响。7个场景通过VR技术两两对比,共12个实验组(两个场景的成对比较)。被试者会在构建的VR场景中漫步30—60 s,充分体验各场景的空间要素差异,实验员也会协同进行要素特征说明。其中,7个实验组的结果(占比58.3%)表现出明显的偏好差异(见表3,图4)。其中表现出较高正效应的街道元素包括:较高的绿视率,街道布置咖啡座椅(即便是在绿视率相差不大的情况下,有座椅的好评率也远高于无座椅)。其他要素如座椅类型及布置位置、街道共享或者分隔,没有在被试步行适宜性感知中表现出显著的差异性。
3.3.2 愚园路实验
愚园路街道场景关注多样性品质维度中的街道底层界面丰富度、自行车和广场对步行适宜性的影响。共设置6个VR场景、12个实验组(两个场景的成对比较)。其中11个实验组结果(占比91.7%)表现出明显的感知偏好差异(见表4,图5)。表现出较高正效应的街道元素包括:街道内无自行车停放,广场环境及街道底层界面。此外,对于自行车停放的评价消极程度与街道底层界面丰富度有关,在相对较为简化的环境中,自行车对于街道场景步行适宜性评价的负效应相对较低。
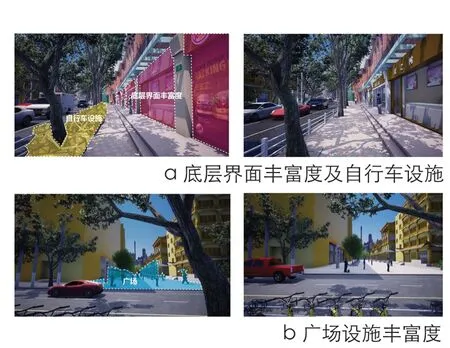
图5 愚园路被试元素示意图Fig.5 Street elements analyzed in Yuyuan Road. Up:diversity of the ground-floor interfaces and bicycle facilities; below: diversity of the square facilities
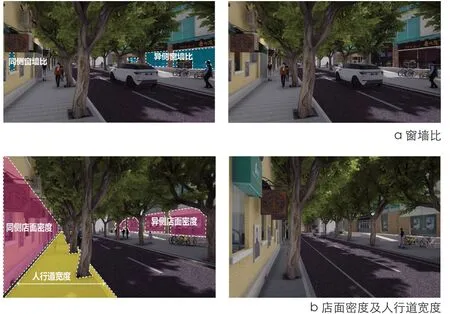
图7 乌鲁木齐路被试元素示意图Tab.7 Street elements analyzed in Urumqi Road, Up: window-wall ratio; below: retail density and sidewalk width
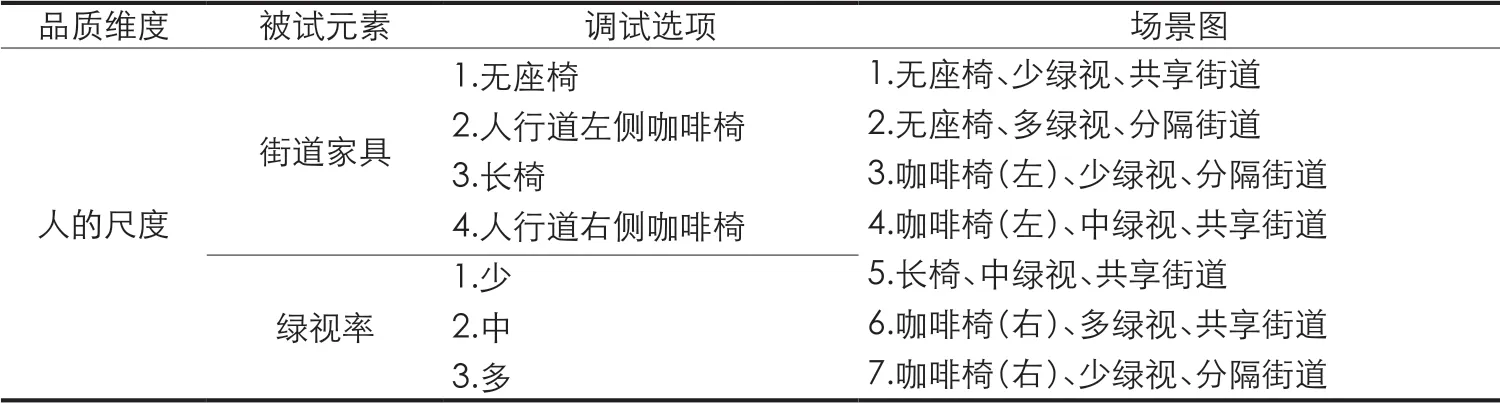
表3 愚园东路实验VR场景信息Tab.3 VR scene components of the East Yuyuan Road experiment
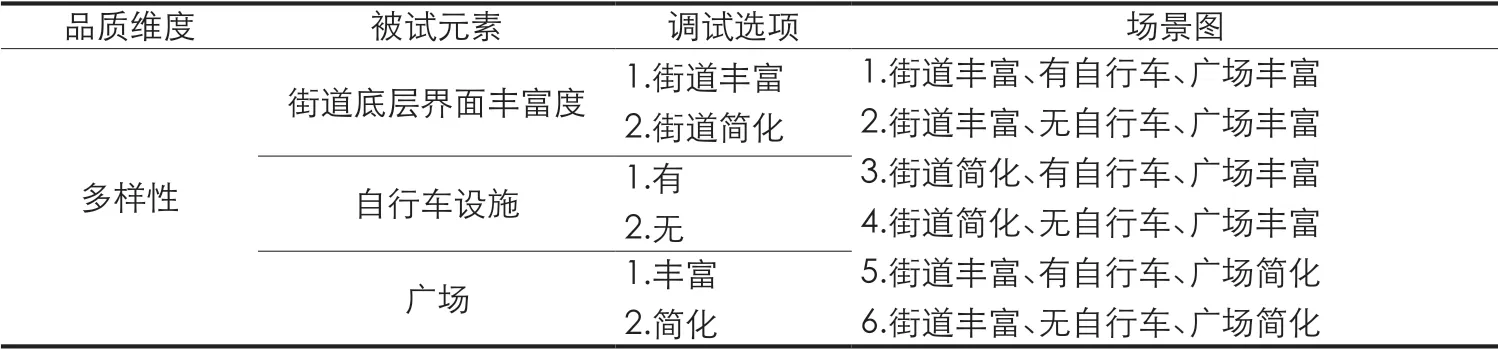
表4 愚园路实验VR场景信息Tab.4 VR scene components of the Yuyuan Road experiment
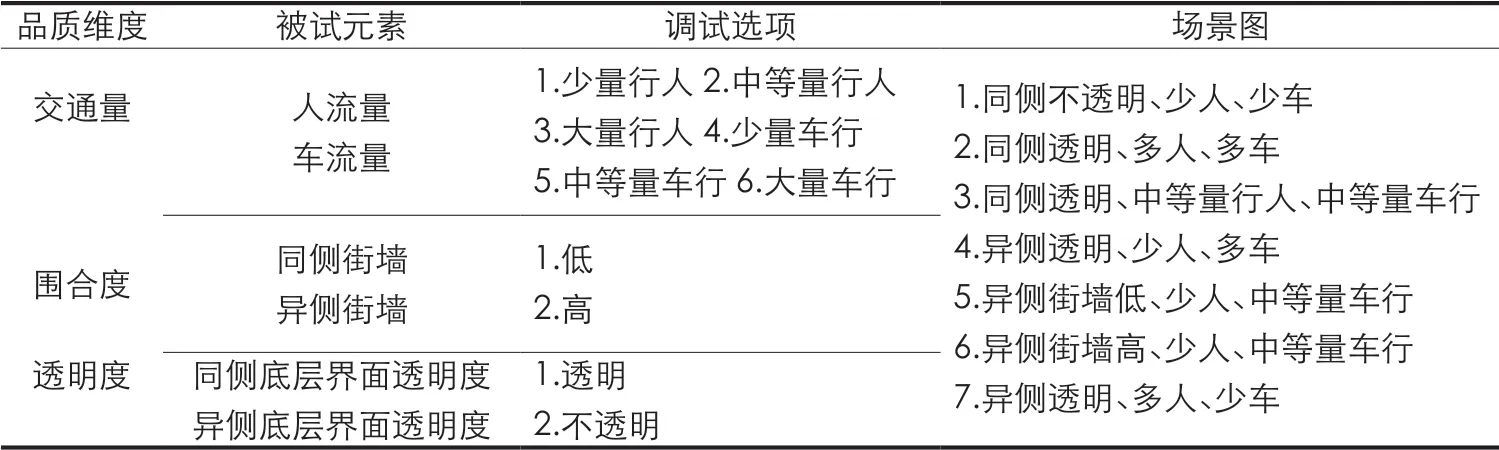
表5 陕西北路实验VR场景信息Tab.5 VR scene components of the North Shaanxi Road experiment
3.3.3 陕西北路实验
陕西北路街道场景关注街道交通流量、街廓围合度和街道底层界面的透明度,共设置7个VR场景、15个实验组(两个场景的成对比较),其中7个实验组(占比46.7%)的结果表明了明显的偏好差异(见表5,图6)。步行适宜性评价显示街道异侧底层界面不透明优于同侧不透明,同侧异侧均较为透明的街道场景步行适宜性评价最高。人车流量过高或过低都会影响步行感受,适中的人车流量评价最高。
3.3.4 乌鲁木齐路实验
乌鲁木齐路街道场景关注以窗墙比度量的街道界面透明度、沿街店面密度及人行道宽度,共设置7个VR场景、15个实验组(两个场景的成对比较)。其中,7个实验组(占比46.6%)的结果表现出较为明显的偏好差异(见表6,图7)。街道同侧界面店面密度较高,异侧界面窗户较多和较宽的人行道对于行人步行适宜性评价起到最为积极的作用。

表6 乌鲁木齐路实验VR场景信息Tab.6 VR scene components of the Urumqi Road experiment
4 数据分析与结果
4.1 数据分析
数据分析主要分为两部分:首先基于埃洛等级评分算法(Elo Rating System)计算每个街道场景的最终得分。这一方法由美国物理学教授埃洛(Elo)创立,是当前对弈水平评估的公认权威规则,已被广泛应用于国际象棋、围棋、足球和篮球等体育运动以及游戏中,可通过两两比较的结果来评估各选手或样本的优劣程度[29]。由于这一算法可将两两比较结果有效转化为线性的定量分值以便于后续分析。故本文也使用其来处理一系列街道场景的比较结果,从而得到每个街道场景的量化分值。相较于让被试者直接给场景打分,该算法更为准确,目前已逐渐应用于环境行为学研究[27]152。
在计算中,一系列两两比较结果CR会被记为一系列数组Ti:CR={T1,T2,T3…},T1=
其中PA是对场景A较之场景B为优的预测;SA,SB则是场景A和B在比较前的分值。
在每次两两比较后,相应场景的分值会基于预测结果和实际比较结果被更新:

其中ŚA为场景A的新分值;K为一常数,经验值取32;RA则根据比较结果计为1(场景A比B好),0(场景A比B差),0.5(场景A和B难以判断)。
随后相关的比较结果会被逐一带入计算,直至最后的结果趋于稳定,届时各个场景的各自分值即为最终的实际分值。
随后基于决策树算法进行特征参照因子提取,获取要素对于步行适宜性的影响权重。决策树是一种根据原数据中目标变量和预测变量特征,以树型结构表示分类或决策集合,产生并识别决策规则并进行新数据预测的方法。决策树能较好地适用于样本量相对较小的数据,从中提炼出树形的分类模型,非常适宜于本文样本量小且各空间要素影响复杂的分析需求。具体来说,决策树中的每个非叶子节点记录了使用何种特征来进行类别的判断,每个叶子节点则代表了最后判断的类别。根节点到每个叶子节点均形成一条分类的路径规则。常用的决策算法包括ID3、CART(分类和回归树算法,Classification And Regression Tree)和C5.0等,其中CART不仅可以进行分类预测,还可以用于解决非线性的回归计算问题,较为适宜于本文。由于本文的预测对象是场景宜步行水平评估数据而非传统的二元决策结果,因此选取了最小化均方误差(MSE)作为分裂和确定特征参照因子的计算标准[30]。算法需要遍历所有的切分变量和切分点,通过选择切分变量和切分点,选出使得叶子节点 MSE之和最小的那种情况作为划分。
CART最小化MSE公式如下:

其中,xi与yi代表被分析数据集,m表示回归树的叶子数量,Cm表示m片叶子的预测值。
本文基于Python计算机语言,运用决策树CART算法,以对街道场景图片的Elo评价分数作为目标变量,以不同街道的形态特征为评估因子对预测变量的重要性进行评估,在保证决策树模型正确性不下降的情况下,对其预测变量进行筛选,从而明确决策树的特征参照因子,即对街道空间步行适宜性起关键影响的特征要素(见图8)。
4.2 分析结果
4.2.1 愚园东路
愚园东路街道形态特征中,有休息座椅(0.596)、街道共享(0.361)、高绿视率水平(0.044)对于街道场景高适宜性评价影响最大,而是否有咖啡座椅及其摆放位置贡献则不显著。决策树结果显示,没有座椅(≤0.5)且绿视率水平较低(≤2)的街道场景普遍适宜性评分较低(702.61),而有座椅且街道共享的场景图在这一实验中获得评分水平较高(1 099.132)(见图9)。
4.2.2 愚园路
愚园路街道形态特征中,广场简化(0.878)、街道底层界面简化(0.122)对于街道场景高步行适宜性评价影响最大,而自行车及其停放设施贡献则不显著。决策树结果显示,广场及街道均较为简化(≥0.5)的街道场景普遍适宜性评分较低(846.5),而广场和街道囊括要素较为丰富的场景则获得评分水平较高(1 115.13)(见图10)。
4.2.3 陕西北路
陕西北路街道形态特征中,街道同侧底层界面透明(0.380)、异侧底层界面透明(0.368)、同侧街墙高(0.251)对于街道场景高步行适宜性评价影响最大。人车流量及异侧街墙高度贡献不显著。决策树结果显示,同侧及异侧透明度均高(>1.5)的街道场景普遍适宜性评分较高(1 042.741),而透明度均低且同侧街墙也较低的场景图在这一实验中获得评分水平较低(673.630)(见图11)。
4.2.4 乌鲁木齐路
乌鲁木齐路街道形态特征中,人行道较宽(0.930)、同侧底层界面多店(0.049)、异侧底层界面多窗(0.020)对于街道场景高步行适宜性评价影响最大。同侧多窗和异侧多店贡献不显著。决策树结果显示,人行道较宽(>0.5)以及异侧窗墙比较高(>0.5)的街道场景普遍适宜性评分较高(1 155.372),而人行道较窄(≤0.5)以及同侧店铺较少(≤0.5)的场景图在这一实验中获得评分水平最低(611.570)(见图12)。

图8 基于决策树方法的特征参照因子提取示意图Fig.8 Feature factors extracted from decision tree model
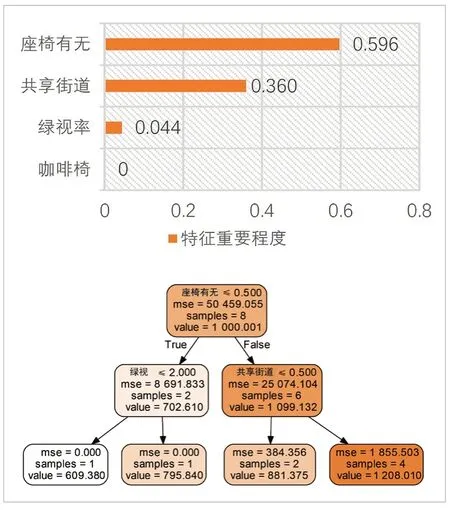
图9 愚园东路特征重要程度示意图及决策树图Fig.9 The relative importance of street elements revealed by decision tree diagram in East Yuyuan Road experiment
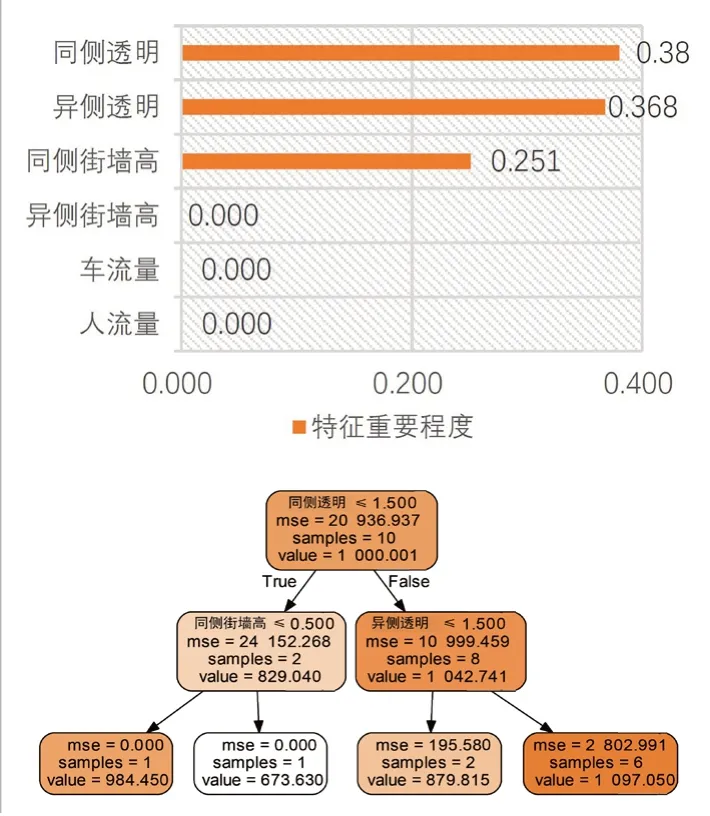
图11 陕西北路特征重要程度示意图及决策树图Fig.11 The relative importance of street elements revealed by decision tree diagram in North Shaanxi Road experiment
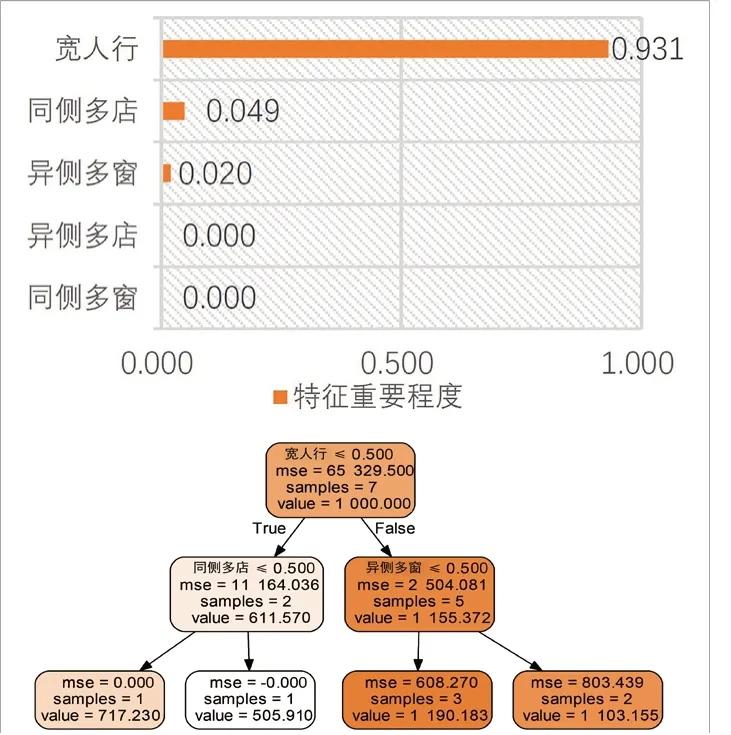
图12 乌鲁木齐路特征重要程度示意图及决策树图Fig.12 The relative importance of street elements revealed by decision tree diagram in Urumqi Road experiment
5 结论与讨论
5.1 结论
研究基于宜步行街道的构成要素理论以及虚拟现实技术的街道场景呈现技术手段,通过实验对象两两场景比选的方式,准确获取行人对于街道步行适宜性感知要素的评价及偏好,并通过场景评分及机器学习算法拟合数据结果,确立旧城中心区街道空间步行适宜性评价标准。研究结果显示,经由统计分析的数据结果与被试者的主观评价偏好基本一致,模型拟合度较高。
5.1.1 不同类型街道步行适宜性感知结果
通过对上海市旧城中心区的4条街道进行相应要素步行适宜性感知实验发现:交通支路型街道(愚园东路)行人适宜性评价关注街道家具提供可休憩的座椅、能够降低车速的共享街道和较高的绿视率水平;商业型街道(愚园路)沿街广场空间设施丰富,逗留人数较多,街道底层界面多元有活力最能影响行人的步行适宜性;生活服务型街道(陕西北路)行人步行适宜性感知取决于街道两侧底层界面透明度是否较高,行人同侧的街墙是否较高从而形成具有围合感的街廓空间;综合型街道(乌鲁木齐路)中较宽的人行道,较高的街道同侧店面密度和异侧窗墙比都有益于行人的步行适宜感。
5.1.2 行人对街道多样性构成指标感知度不同基于各街道分析结果,行人对于街道适宜性的主要感知要素以近人界面为主。因此,场景视角处于同侧的街道底层界面的窗墙比、街墙高度、店铺密度相较于异侧对行人步行适宜性评价的影响更加显著。除此以外,行人对于街道的适宜性评价也扩展到街道空间以外的区域,可以被行人感知到的沿街广场空间丰富程度也起到了影响作用,显示了视线可达性对于步行适宜性评价的重要作用。整体实验结果显示,行人普遍对于街道多样性构成指标例如街道底层界面的丰富程度、设施分布,以及人性尺度的街道家具和绿视率等要素感知度较高,容易产生较为明确的步行适宜性评价偏好;而街道交通流量、街廓、界面透明度、店面密度等要素在场景中的差异则不易被识别。这一方面可能是由于VR设备呈现的街道场景主要以视觉感知为主,屏蔽掉了其他感官信息,例如店铺及机动交通造成的噪音,所以行人难以识别其微观差异;另一方面显示出,相较于沿街建筑立面和交通干道上的车流活动,人行道及其两侧的指标调试更能影响步行适宜性评价及感受。
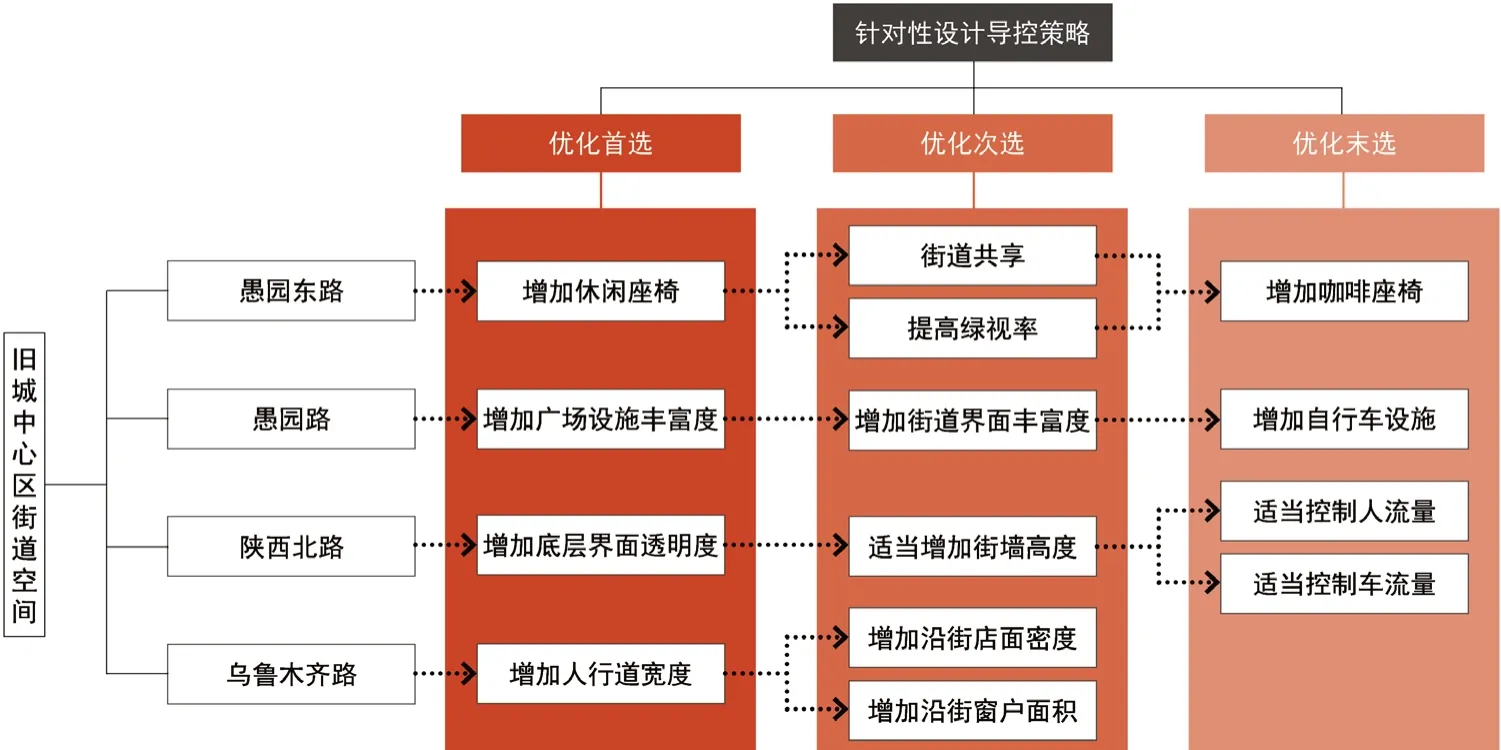
图13 针对性设计导控策略示意图Fig.13 Design control strategies
5.1.3 旧城中心区不同类型街道空间微更新设计导控策略针对各街道的研究结论,我们为4类旧城中心区街道空间的微更新设计导控制定了3个层级的策略。针对交通支路型街道愚园东路,微更新优化设计策略宜首选增加街道的休闲座椅,其次可通过使街道共享和增加植被或改变树木的种类,增加叶片面积来提高绿视率水平。商业型街道愚园路则首先增加沿街广场空间的丰富程度,其次可优化街道底层界面,通过增加底商密度来提升界面的丰富程度。生活服务型街道陕西北路首先为增加底层界面的透明度,增加行人与室内空间的交流程度,其次可适当增加街墙高度,形成具有围合感的街廓空间。综合型街道乌鲁木齐路则首先增加人行道的宽度以提升街道的步行适宜性,其次应关注街道底层界面的多样性和透明度(见图13)。
5.2 讨论
5.2.1 技术创新及研究意义
本文通过搭建旧城中心区街道空间的VR场景,以可视化SP实验获取步行适宜性感知要素的评价,并使用决策树这一机器学习算法分析多维度街道空间要素的影响阈值,回应在不同的街道特征和有限的空间下,采用何种导控方法能实现最小投入下的街道空间微更新的步行适宜性最大化问题,并基于相应的量化指标制定精细化的有针对性的设计导控策略,兼具研究意义与实践价值。
本文运用新分析技术与算法实现步行适宜性这一具身性感受的量化测度,实现了对以往难以测度的品质感知的精准分析,为当前街道空间品质研究提供了一个聚焦人本视角的新方向。
5.2.2 研究局限及展望
由于本文所涉街道的VR场景搭建是基于街道的真实环境建立基础模型并进行要素调适,因此研究实证了各街道相应要素对于步行适宜的影响权重。然而,考虑到其他旧城中心区街道空间环境要素组合方式的差异以及部分要素之间可能存在的共线性问题,街道空间关键品质维度包含的全部要素对于步行适宜性评价的综合影响作用还有待进一步探索。同时,在实验过程中已经发现行人对于部分要素的视觉感知力较差的问题,这对未来满足行人多感官体验的VR场景搭建提出了新的挑战。