无人机影像采集技术研究
2020-11-06刘丹丹韩礼
刘丹丹 韩礼
摘 要:目前,无人机被广泛应用于摄影测量和遥感应用当中,其飞行性能灵活而稳定、具有良好的开发改装潜力、便于人们操作与控制。此前工作人员在倾斜摄影的时候需要使用多个镜头,无人机影像采集技术出现以后,进行倾斜影像采集的时候凭借单镜头相机就可以达成目标。文章详细研究了无人机影像采集技术,以慈溪市1:1 000航拍为研究对象,结合倾斜摄影的相关需求以及无人机的特点来进行,最终提出适宜的策略,确保其工作顺利开展。
关键词:无人机;影像采集;航拍
中图分类号:P237;TP751 文献标识码:A 文章编号:2096-4706(2020)12-0013-03
Abstract:At present,unmanned aerial vehicle (UAV) is widely used in photogrammetry and remote sensing applications. Its flight performance is flexible and stable,has good development and refitting potential,and is easy for people to operate and control. Before,the staff needed to use more than one lens in tilt photography. After the emergence of UAV image acquisition technology,the goal can be achieved by using a single lens camera. This paper studies the UAV image acquisition technology in detail,taking Cixi City 1:1 000 aerial photography as the research object,combined with the relevant needs of tilt photography and the characteristics of UAV,and finally puts forward appropriate strategies to ensure the smooth development of its work.
Keywords:UAV;image acquisition;aerial photography
0 引 言
目前我國正在开展第三次国土调查工作,而在国土调查工作中,主要凭借航拍影像采集技术来获得数据。浙江省慈溪市自然资源和规划局负责慈溪市国土调查工作,主要工作内容为:慈溪市1:1 000航拍影像采集制作。本次任务我院联合江西省地矿测绘院,共同利用航空摄影,采集并制作慈溪市全市范围的1:1 000比例尺精度的数字正射影像,影像分辨率优于0.1米。成果影像数据作为第三次全市国土调查的工作底图。在此项工作中,总结了前人经验,研究得出一些新的思路方法,供相关人员参考。
1 研究区域概况
本次研究的区域集中在慈溪市,从地理位置来看,此区域位于浙东杭州湾的南岸,东、东南等区域与镇海区、江北区接近,而浙东杭州湾的西、西南等区域与余姚市相接。从经纬度来看,本区域位于北纬30°02′~30°24′与东经121°02′~121°42′之间,本区域在沪、杭、甬三角地区中作为核心部分。其境总面积已经达到968.26平方千米。对于慈溪市土地调查工作来讲,主要凭借航拍作业,拟用无人机进行航空摄影,即对慈溪市整个区域使用无人机进行航拍,经过影像采集与制作最终得到了数字正射影像图(DOM),此项目涉及面积968.26平方千米,如图1所示。
2 技术路线
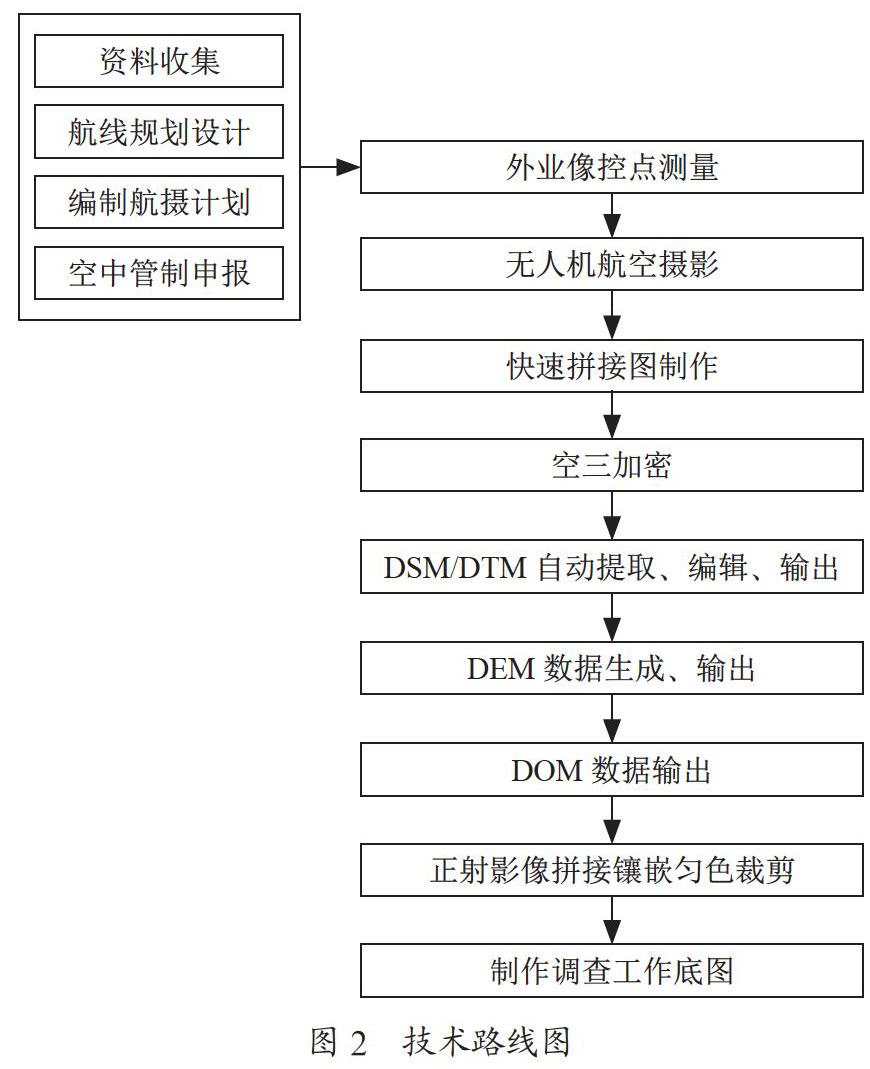
整体技术路线如图2所示。
(1)对测区已有的资料进行收集,对飞行航线进行规划设计,编制航摄计划,并向慈溪市所属空军部队进行空中管制申报;
(2)对测区实施1:1 000比例尺精度航空摄影,且使用无人机飞行平台,同时发挥尼康D810航拍摄相机的作用;
(3)凭借CORS系统的同时利用领先的GPS技术来进行像控点的测量,对研究区域进行航空摄影的时候主要发挥无人机的各种功能;
(4)对像控点进行布设的时候主要凭借Inpho摄影测量处理系统来完成,最终获得测区的自由网快拼总图。其中,像点中心坐标为高精度POS数据,而外方位元素能快速解算摄影测量中的自由网初步结果;
(5)针对测区进行加密分区操作,此操作主要使用航空摄影资料、后差分的像点坐标以及像控点成果等数据,同时使用Inpho摄影测量系统之中的MATCH-AT模块进行空中三角测量计算;
(6)为了迅速提取地形和地表信息,积极使用MATCH- T DSM;为了确保影像测区形成无缝模型,需要从立体像对中进行提取高精度的数字地形模型和数字地表模型,最终需要对DSM/DTM进行编辑,此时需要发挥DTMaster模块的作用;
(7)为了获得高质量的数字正射影像,需发挥OrthoMaster模块的作用,同时需要具备一定的源数据,包括空三成果、数字地形模型(DTMs)等,同时充分发挥OrthoVista模块自动补偿的功效,即对源于影像处理过程的影像亮度和改变的颜色,最终合并多个单模型正射影像完成一幅正射影像镶嵌图,此正射镶嵌图没有缝隙、具有平衡的色彩;
(8)为了快速提取自动地形和地表信息需要借助Inpho系统中的MATCH-T DSM模块,高精度的数字地形模型与数字地表模型等模型,需要从空三加密后的立体模型中提取,最终影像测区获得无缝模型。在这之后进行编辑操作,且凭借MATCH DTMaster模块,最终测区形成数字高程模型(DEM);
(9)为了进一步完成镶嵌、匀色等操作,需要发挥OrthoMaster模块的作用,然后进行分幅、裁切、输出等操作最终获得DOM成果;
(10)依据经过裁切操作之后DOM制作慈溪市国土调查工作底图。
3 慈溪市1:1 000航拍中重点技术环节
3.1 航线设计
在设计航摄分区之前,收集了慈溪市的数字化高程模型,在设计的重点突出以下两方面:其一,超过摄区和航路上最高点100.0米以上的高度为飞行高度,而航线总航程不能超过无人机续航能达到的最长路程;其二,对于分区内的地形高差而言,其数值小于等于1/6摄影航高,尽量增加分区航线跨度,保证整个拍摄区域均被覆盖。根据DEM分析出慈溪市的地势特点:北部平缓,南部多山,且平缓区约占区域总面积的2/3,山区约占1/3,依据该数据将研究区域划分为两部分,即平原测区和山地测区。慈溪市区域共规划布置59条基线,且规划按照相关原则来进行。其一,航向覆盖超出摄区边界线,应大于等于两条基线;其二,旁向覆盖超出摄区边界线大于等于像幅的一半。
3.2 像片控制点布设
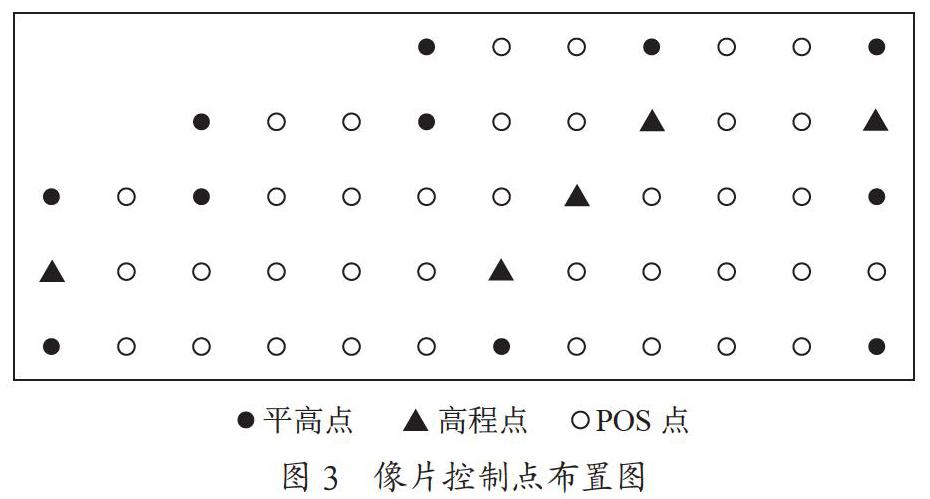
目前慈溪市区域网布点具有不规则的特点,主要受地形条件的影响,比如,布平高点于凸出处,而布高程点于凹进处,相比于两条基线的长度,凹角点与凸角点之间距离更长时,则布设平高点于凹角处,如图3所示。
3.3 航空影像空三加密处理
以制定的规范以及项目的精度要求为依据,详细分析此次航空影像与外业控制点信息,最终明确空三加密作业的具体要求,同时及时构建对应的加密分区工程,并对测区基本参数进行设置,最终构建相机与控制点的相应文件。在建立测区影像航线列表的时候依据加密分区来进行。通过软件对定向、全自动转点进行相关计算。当遇到大面积水域或大面积植被的时候,软件会做出必要的提示,最终采取人工干预的办法来完成计算。
为了顺利完成立体观测切准点位,需要以外业控制点刺点说明与点位略图为依据,同时结合刺孔对点位进行判定,最终把外业控制点引入,同时使用光束法对整个测区进行平差处理。除此之外,还要在满足单区网的加密精度要求的情況下,对区域网进行间接边处理操作。在这之后,需要在网间接边处选出同名点,依次进行计算与比较同一点位的具体坐标;对其误差进行比较分析,不符合要求的,需要对接边网的构网强度以及可靠性进行分析,然后经过反复修正达到要求。
3.4 数字正射影像生成
经过加密操作的空三数据需要使用Inpho航测处理系统中的OrthoMaster正射影像生产模块进行恢复测区的同时创建立体像的操作。在这之后需要导入已提取的DSM、DEM数据,进而获得单模型的正射影像,为了使整个测区的模型正射影像达到无缝拼接的效果需要利用镶嵌线来实现,镶嵌线生成于OrthoVista镶嵌匀色模块,最终经过一系列操作获得标准分幅DOM数据成果。具体分析如下:
(1)基于OrthoMaster,进行单模型正射纠正,以DEM为依据,同时进行采样操作,使用的方法是双线性内插或三次卷积内插法,最终得到正射单片;
(2)基于OrthoVista不断调整色彩,凭借快视图的作用,确保其颜色符合要求,同时进行导入操作,在这之后对正射影像成果进行全自动匀色处理,最终使DOM影像要达到要求即可;
(3)系统往往凭借DSM与DEM对地物是否优化生成镶嵌线,进行智能判断,及时躲避相关障碍物,使建筑物及其他要素更加完整的同时保证镶嵌没有缝隙;
(4)严格按照相关要求裁切输出DOM标准分图幅,经过裁切操作后的影像应避免有黑白边的情况发生。
4 经验总结
通过对慈溪市1:1 000航拍项目的研究与分析,总结了在进行无人机影像采集的过程中相关的方法与技巧,具体分析内容如下:
(1)针对测区来看,主要选择的是丘陵、山地等地区,这些地区具有茂盛的植被,导致目标点不是很多,尤其明显的目标点很少,极大增加了布设像控点的难度;一旦航向连续出现4条以上基线,或旁向连续出现2条以上基线的时候,工作人员没有办法在像片标准点位上找到最佳的目标,此时应该对基线跨度进行完善,或者布设像控点的时候应该选择在像片不是标准点位的位置;
(2)若使用CORS网络RTK模式对像控点的平面与高程坐标进行测定的时候,需要控制好时间,比如,初始化时间高于3分钟之后,依然得不到固定解的话,有必要对通信链接实施断开操作,同时把GNSS接收机重新打开,也就是对其进行初始化工作。若反复进行3次之后依然达不到初始化的目的,则应详细分析本次现场观测的环境与通信链接状况,然后选择较好的位置再进行测量;
(3)在进行空三加密时若出现自动挑点的现象,则需要对加密区的点位分布情况进行检查,这样做的目的是为了确保任何一张影像的连接点与其标准点对应。对于那些少点、没有点的影像应该添加连接点,以人工的方式,同时及时清除影像边缘点,使控制网达到一定的精度与强度;
(4)在制作DOM的时候,需要及时判断地物优化生成镶嵌线,即凭借DSM和DEM数据,最终获得完整的建筑物,同时接边达到自然过渡,无缝镶嵌的效果。
5 结 论
本文以慈溪市1:1 000航拍为研究对象,阐述了应用无人机对地表进行影像采集的工作流程,并详细总结了航线设计、像片控制点布设、航空影像空三加密处理及数字正射影像生成等工作的实践经验。希望对实践经验的总结和归纳,为使用无人机航拍技术来影像采集的同仁们提供参考和帮助。
参考文献:
[1] 赵涛.无人机航测在地形数据采集中的应用 [J].山西农经,2020(4):145+147.
[2] 张李平.基于无人机遥感影像的大规模地形变化动态监测方法 [J].黑龙江工业学院学报(综合版),2019,19(11):73-78.
[3] 吴熠文,余加勇,陈仁朋,等.无人机倾斜摄影测量技术及其工程应用研究进展 [J].湖南大学学报(自然科学版),2018,45(S1):167-172.
[4] 杨奎生.低空无人机大比例尺测图数据采集方式研究 [J].电力勘测设计,2017(S1):147-151.
作者简介:刘丹丹(1980.10—),男,汉族,浙江慈溪人,测绘工程师,本科,研究方向:测绘工程;韩礼(1976.10—),男,汉族,江西南昌人,测绘助理工程师,本科,研究方向:测绘工程。
