浅谈H桥D类功率放大器在ADCP中的应用
2020-11-06李鑫金华冯雅忱
李鑫 金华 冯雅忱

摘要:本文从声学多普勒流速剖面仪(ADCP)简介入手,主要对其工作原理以及实现效果进行分析,ADCP能够满足各频率ADCP的功耗需求,确保测量深度,应该值得推广,希望本文给相关工作者参考。
关键词:H桥;功率放大器;ADCP;应用
1.简介
ADCP(Acoustic Doppler Current Profiler)是声学多普勒流速剖面仪的简称,是目前国际公认最主要的海洋流场测量仪器,常用于水下深海导航设备,可为载体提供相对海底的绝对速度、对水层的相对速度和载体距海底的高度等信息,它通过测量声波经水体散射产生的多普勒频率,得到被测水体的流速。
ADCP在工作时首先由发射机激励换能器向水中发射超声波。发射结束后,四只换能器分别开始各自接收海水反射回波,回波信号经接收机进行放大、补偿、滤波、混频等一系列处理后,最终变成了四路正交信号。这些模拟信号经过A/D采集系统后变成数字信号,经过高速数字处理板利用ADCP测速算法做分析运算后,由计算机显示结果和存盘。
2.原理
发射机采用高频宽带声纳发射机,接收由数字信号处理器产生编码的载频信号和发射脉宽控制信号,进行隔离后送到驱动级。驱动级驱动H桥D类功率放大器,将直流低电压大电流的功率信号HV,经过阻抗匹配变压器后得到高电压低电流型的功率信号,激励换能器向水中发射超声波。
3.实现
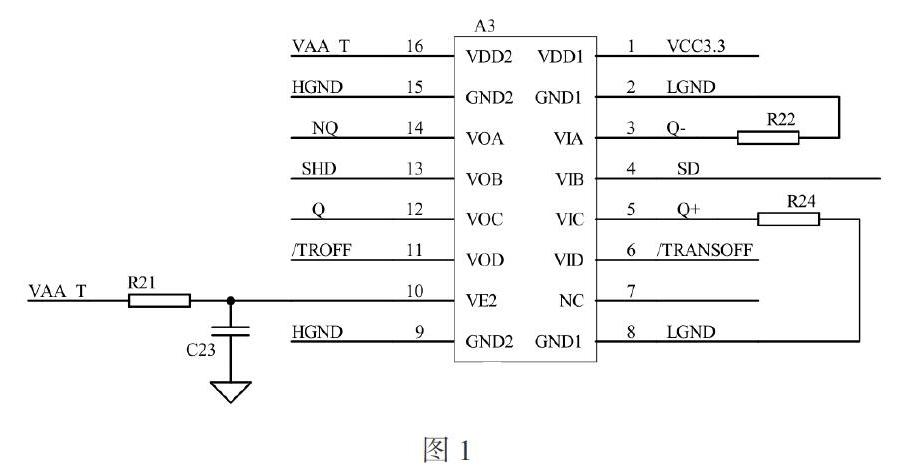
首先发射机接收来自处理器的载频信号Q+、Q-以及脉宽控制信号SD,Q+和Q-为对应频率ADCP设备的中心频率,SD为对应频率ADCP设备的发射脉宽,不同工作频率的ADCP的载频信号和脉宽控制信号频率各不相同,最大频率为1.2MHz。这3种信号经发射机的数字隔离器进行隔离后分别定义为Q、NQ和SHD,这里采用4通道数字隔离器,通过高速 CMOS 和单片空芯变压器技术,可提供出色的性能特征,优于光电耦合器设备等其他产品,最高数据速率10Mbps,最大频率10MHz,完全能够满足应用。原理图如图1。
经隔离后的信号被送至由H桥D功率类放大器组成的逆变电路中,该电路由2只驱动芯片驱动4只大功率高速MOS管实现。其中驱动芯片为双路栅极驱动器,并分为高低端,可同时驱动2只MOS管,最大延迟120ns,满足应用。MOS管采用N沟道MOS管,最大连续漏极电流57A,最大漏源电压100V,最大漏源电阻23mΩ,开关延迟时间最大45ns,远大于载频信号的频率,完全能够满足应用。原理图如图2。
其中Q被送至第1只驱动芯片的高端输入Hin和第2只驱动芯片的低端输入Lin,NQ被送至第1只驱动芯片的低端输入Lin和第2只驱动芯片的高端输入Hin;SHD作为控制信号端控制Q及NQ的输出,分别被送至驱动芯片的控制端SD。
在本电路中Q和NQ是频率相同相位差为180°、占空比为50%的方波信号,SHD为ADCP的发射脉宽控制信号。当驱动芯片接收到SHD發射脉宽控制信号后,4只MOS管将按Q和NQ频率开关,前半个周期第1只驱动芯片的Ho输出,Lo不输出,第2只驱动芯片的Lo输出,Ho不输出,此时MOS管M31和M42打开, HV将通过第一桥臂输出至变压器T1;后半个周期第2只驱动芯片的Ho输出,Lo不输出,第1只驱动芯片的Lo输出,Ho不输出,此时MOS管M41和M32打开, HV将通过第二桥臂输出至变压器T1。在脉宽控制信号SHD的时间内,HV将按照H桥路线运行,经变压器T1后完成逆变,激励换能器工作。
结语
本电路已在ADCP各频率产品中应用,实际应用效果良好,能够满足各频率ADCP的功耗需求,确保测量深度。
参考文献
[1] 鲁远征,吴加学,刘欢.河口底边界层湍流观测后处理技术方法分析[J]. 海洋学报(中文版). 2012(05)
[2] 蒋建平,朱汉华. 国产RIV ADCP长江流量测验适应性测试[J].水利信息化. 2019(04)
[3] 刘彦祥. ADCP技术发展及其应用综述[J].海洋测绘. 2016(02)
[4] 刘轲,商少平,贺志刚.国产自容式声学多普勒流速剖面仪(ADCP)的适用性评估方法及其应用分析[J]. 厦门大学学报(自然科学版). 2015(06)
