基于Flex传感器的免耕播种机播深智能调节系统
2020-11-06周淑辉王增辉黄东岩
周淑辉, 王增辉, 黄东岩
(1. 吉林大学 a. 汽车工程学院; b. 生物与农业工程学院, 长春 130022; 2. 东北师范大学人文学院 理工学院, 长春 130117)
0 引 言
保护性耕作是采用机械化为主要作业手段, 通过少耕或免耕方式减少土壤的翻耕, 并将农作物秸秆、残茬保留在地表的一种耕作技术[1]。其可以有效地减少土壤水分的蒸发, 有利于增加土壤有机质, 使土壤结构得到改善, 并能减少土壤风蚀和水蚀, 有效缓解沙尘暴危害[2]。免耕播种机是实现这一耕作方式的理想装备, 其不同于传统播种机, 完全不必对土壤进行翻耕, 且可一次性完成开沟、播种、覆土、镇压等作业[3]。在实际播种工作中, 播量、株距和播深是衡量免耕播种机播种质量的主要指标, 因此, 精确地控制这3项指标可以确保种子在田间播下后的合理分布, 可有效地保障农作物增产增收[4]。
在保护性耕作条件下, 地表条件恶劣, 影响免耕播种质量, 尤其是对播深一致性的影响较大[5]。为应对保护性耕作条件下的地表状况, 保证种子的播深一致性, 免耕播种机设计了仿形机构。目前应用于免耕播种机的仿形方式可分为主动仿形与被动仿形两类。被动仿形因其结构简单, 成本较低, 仿形能力较好, 应用比较广泛, 但这种仿形方式无法根据土壤实际情况做出及时准确的响应, 存在仿形提前和仿形滞后的问题, 会导致种子播深不均, 甚至种子裸露, 影响最终的出苗[6]。由于动仿形机构仿形灵敏度低, 为此研究人员的研究目光转向主动仿形[7-10]。
通过超声波传感器检测地面起伏变化调整播种单体的上下浮动的方式是典型的主动仿形[11-13]。免耕播种的地表情况复杂, 土壤空间差异较大, 仅靠超声波传感器检测到的地面起伏变化调整播种单体的上下浮动, 很难使播种深度达到预期效果[14]。因此根据土壤的空间差异性, 实时调整播种单体的播种深度显得十分重要。
为此笔者采用Flex传感器检测播种机单体的对地压力, 以描述土壤空间差异性, 并确定传感器形变与播种单体对地压力的关系[15]。通过Mamdani模糊算法建立了深度调节机构----空气弹簧的智能控制模型。该模型以播种单体对地压力与目标压力的偏差、以及该偏差的变化率作为输入, 以播种单体的下压力增量作为输出, 通过调节空气弹簧内气压可以为播种单体一个可控的下压力, 使播种机的开沟器能深入到目标深度。
1 材料与方法
1.1 传感器

图1 信号转换电路Fig.1 The signal conversion circuit
Flex传感器是一款机电特性传感器, 可用于物件弯曲强度的测量, 其应用电路简单、输出信号易于处理, 目前在手指弯曲度检测、机器人、医疗器械和乐器等方面有广泛应用[16]。笔者研究所用Flex传感器型号为Flex2.2。在无弯曲状态下(即平坦状态)的输出电阻为25 kΩ, 正向弯曲(即导电高分子聚合物PEDOT:PSS所在的一面朝上弯曲)时, Flex 传感器的输出电阻增大, 反向弯曲时其输出电阻减小[17]。由于Flex传感器输出的信号为电阻, 在智能控制中不利于微控制器的采集, 常用的做法是将电阻信号转变为电压信号予以处理。笔者设计了如图1所示的信号转换电路。图1以串联分压法实现信号转换, 采用运算放大器LM358作为电压跟随器阻断信号损耗。
根据串联分压原理可得

(1)
其中R1是恒定值电阻,R2是Flex传感器,Vout和Vcc分别是输出电压信号和基准参考电压。可见,Vout与R2并非线性相关, 这对控制应用是不利的。为消除这种不利的非线性关系, 将R1设置成大电阻(3 MΩ), 使R1≫R2, 所以式(1)可写为
(2)
1.2 对地压力与传感器输出电压关系
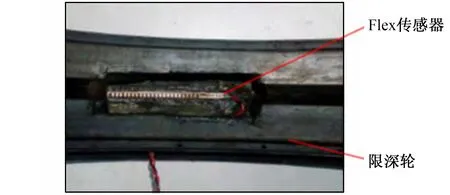
图2 Flex传感器安装模式Fig.2 The Flex sensor installation mode
为了标定播种单体的对地压力与Flex传感器输出电压的关系, 进行了载重测量试验。在试验过程中将40~100 kg的重物放在播种单体上, 观测播种单体对地变化。为监测播种单体对地压力, 将Flex传感器安装在限深轮上, 如图2所示。安装方式是使用聚氨酯胶水将Flex传感器无缝粘贴在限深轮内壁上。
为了测试播种单体在运行条件下, 传感器的输出信号变化情况, 以恒定的速度牵引播种单体均速运动, 并测量传感器的输出结果(见图3)。
测量结表明, 随着滚动传感器与地面的逐步接触, 其输出曲线先减小后快速上升, 当传感器与地面的接触长度达到最大时, 传感器的输出电压亦达到最大。随着传感器逐步离开地面, 传感器的输出电压开始回落, 回落趋势与上升呈相反态势。当传感器完全离开地面后, 其输出电压基本保持不变。此外, 随着负载的增加, 传感器的输出电压也相应地增加。这是因为轮胎与地面接触过程中产生了形变, 而未与地面接触部分几乎没有形变, 并且随着负重的增加, 形变也更突出。为了方便检测, 以 Flex传感器输出的峰值信号作为检测信号, 提取播种单体在不同载重下的Flex信号峰值, 并作线性拟合, 结果如图4所示。因此, 得到拟合度大于0.99的计算公式为
y=0.053 1x+73.44
(3)

图3 传感信号随轮胎滚动变化曲线 图4 传感器载重与传感器输出电压的关系 Fig.3 The sensor signal changing Fig.4 The relationship between sensor with tire rolling curve load and sensor output voltage
1.3 播深智能调节方法
免耕播种机的播种单体主要由平行四连杆仿形机构、清茬装置、橡胶限深轮、开沟圆盘以及覆土镇压轮等构成, 如图5所示。免耕播种单体通过平行四连杆机构安装在机架上, 并能随四连杆机构上下浮动以适应土壤表面的起伏变化。清茬装置主要包括一个波纹圆盘破茬刀和一对成“V”字型安装的爪轮。清茬装置安装在免耕播种机前端, 可以有效地扫除种床上的秸秆和残茬, 提高种床土壤温度和播种机的通过性[18]。橡胶限深轮以左右对称的形式安装在开沟圆盘两侧稍微靠后的位置。免耕播种机工作过程中, 由于播种单体自身重量使其对地表有压力(称之为对地压力), 使开沟圆盘的下部可以嵌入到土壤中, 而两个限深轮则压在地表上, 限深轮与开沟圆盘之间存在一个固定的高度差, 该高度差即为设定的目标深度h[19]。

图5 系统结构原理图Fig.5 The schematic diagram of system structure
当对地压力足够时, 播种单体的开沟深度可达到h, 但不会超过h, 这是因为限深轮的限制作用。当对地压力不够(包括无对地压力, 即限深轮悬空)时, 开沟圆盘的开沟深度将小于h。因此, 可以根据播种单体的对地压力间接判断播种深度。播种单体作业时, 会因为种、肥不断减少, 以及播种土壤的凹凸不平、坚实度不一致等空间差异性问题, 导致开沟圆盘插入土壤深度达不到适宜深度, 即播深不合格[20]。为使播种深度满足种植需求, 为播种单体提供一个智能可调的下压力机构是十分必要的。为此, 在播种单体的四连杆上增加了一个以空气弹簧作为下压力输出部件的气压传动系统。本研究中气压传动系统主要由空气压缩机、储气罐、过滤器、电-气比例阀和空气弹簧组成[21]。空气压缩机压缩气体用以提供初始气能, 储气罐储存气能, 过滤器吸附水蒸气起干燥作用, 电气比例阀控制空气弹簧的输出下压力。
将Flex传感器粘合在限深轮内壁, 可用于实时监测播种单体作业时的对地压力。根据设定的目标播深h, 可标定出对应的目标对地压力。之后, 采用播种单体的实时对地压力, 结合目标对地压力, 以空气弹簧产生的下压力为建模因子建立智能深度调节模型, 实现播种单体下压力的动态实时校正, 进而保证开沟深度与目标深度一致。
考虑到单一Flex传感器难以满足实时性要求, 将3个性能、型号完全相同的Felx传感器以120°间隔安装在限深轮的内壁上。为了有效确定Flex传感器在滚动过程中的位置, 在限深轮外侧相应地设置了3个霍尔接近开关, 每个霍尔接近开关均沿前进方向固定安装在Flex传感器的前端。
1.4 Mamdani模糊模型构建
空气弹簧所提供的下压力只能通过控制电气比例阀输入信号的大小调节。为了获得合适的下压力, 笔者以目标压力与实时对地压力的偏差ΔP以及ΔP的变化率dP作为输入量, 以空气弹簧下压力F作为输出量, 构建了一个Mamdani型的双输入-单输出模糊控制器。设计中, 将ΔP覆盖到7个模糊子集上, 即正偏差大(PDL)、正偏差适中(PDM)、正偏差小(PDS)、偏差为零(PDZ)、负偏差小(NDS)、负偏差适中(NDM)和负偏差很大(NDL)。将dP覆盖到3个模糊子集上, 即偏慢(DS)、适中(DM)和偏快(DF); 将空气弹簧产生的下压力F覆盖到4个模糊子集上, 即零下压力(FZ)、小下压力(FS)、中下压力(FM)和大下压力(FL)。选取ΔP、dP和F的论域分别为[-1, 1]、[-0.1,0.1]和[0,1]。采用高斯型函数作为两个输入量ΔP、dP的隶属度函数, 以三角函数作为输出量F的隶属度函数。根据田间播种深度调节经验, 制定了如表1所示的21条模糊控制规则。

表1 模糊控制规则

图6 模糊控制输入输出关系曲线Fig.6 The relation curve betweeninput and output of fuzzy control
根据模糊近似推理法则[22-23], 可获得模糊控制器的输入变量ΔP、dP与输出变量F之间的关系, 如图6所示。从图6中可以看出, 当ΔP大于零时, 空气弹簧下压力F随着ΔP的增大而增大。这表明对地压力越偏离目标压力, 空气弹簧给予的下压力越大, 并且随着dP的增大, 空气弹簧的下压力也随着增加; 当ΔP小于零时, 空气弹簧下压力F基本趋近于零。这表明对地压力大于目标压力时无需空气弹簧加载附加下压力。
1.5 智能调节系统设计
为了有效地实现免耕播种机的播深调节功能, 笔者基于Flex传感器和Mamdani模糊模型设计了一个智能调节系统。系统包括采集器和调节器两大部分, 如图7所示。采集器用于实时采集播种单体的对地压力, 调节器运行Mamdani模糊控制算法实现播种深度动态调节。鉴于限深轮是滚动的, 采集器和调节器通过无线模块NRF24L01通讯。采集器设计采用STM32F103RCT6芯片作为微处理器, 3个Flex传感器的峰值通过霍尔传感器的触发和爬山算法的比较予以采集。并且考虑Flex传感器输出信号经信号转换电路处理后是微弱的, 因此在设计中增添了信号放大电路。调节器包括1个STM32F103ZET6芯片、NRF24L01和输出控制电路。调节器通过NRF24L01接收采集器发送的对地压力检测信号。由对地压力检测信号与设定的目标压力求差可获得对地压力偏差信号。STM32F103ZET6是控制中心, 通过查询存储表的方式运行Mamdani模糊模型程序, 根据对地压力偏差信号及其变化率可查询到Mamdani模糊模型输出值。输出值由输出控制电路处理后作用于电-气比例阀, 以实现空气弹簧下压力调节, 进而保证播深达到设定目标。

图7 系统设计框图Fig.7 The system design block diagram
2 结果与讨论
2.1 仿真实验
为了模拟并测试系统的响应效果, 在Matlab软件中建立如图8所示的Simulink仿真模型。图8中kP、kdP分别表示对地压力偏差及其变化率的量化因子,kf为弹簧弹力输出量的比例因子。kP和kdP可根据播种单体的对地压力取值范围予以确定,kf则可通过空气弹簧输出下压力范围予以确定。

图8 Simulink仿真模型Fig.8 The Simulink model

图9 模型的正弦输入响应曲线Fig.9 The sinusoidal input response curve of the model
为了降低仿真复杂度, 以便观测仿真结果, 在仿真过程中对输入、输出变量进行归一化处理, 并令kP=1,kdP=0.05,kf=1。为了分析系统对播种深度变化的响应情况, 使对地压力偏差ΔP按正弦曲线ΔP=sin(2t)变化, 并对模型进行仿真试验, 结果如图9所示。
从图9中可以看出, 当ΔP>0时, 输出响应F随着h的变化而变化, 并且最大值接近于1; 当ΔP<0时, 输出响应F接近于 0。图9中, 输出响应曲线在平衡点(最小值或最大值)附近达不到极值(0或1), 这是由于模糊控制本身存在控制盲区所造成的。仿真结果表明, Mamdani模型的输出响应曲线的变化规律满足播深调控需求。
2.2 田间测试实验
系统安装在具有两行播种单体的玉米免耕播种机上(见图10a), 在田间地进行试验时设置目标播种深度为50 mm。为了便于测量, 试验前将其中1个单体的覆土装置卸下(见图10b)。田间试验地为黑钙土, 前茬为玉米保护性耕作, 测定0~5 cm深度土壤含水率为16.8%, 土壤容重1.1 g/cm3, 平均坚实度2.4 kg/cm2, 茬高12~18 cm, 田间有少量的植物残株、残叶覆盖。试验分块进行, 每块试验地的长度为50 m, 拖拉机作业速度分别设置为6 km/h、8 km/h、10 km/h。为了对比主动和被动两种调节方式的作业效果, 作业前对试验地表面修整, 使试验地表起伏变化高度差均控制在0.1 m。主动调节开启播种深度智能调节系统, 被动调节则将该系统关闭。作业时, 拖拉机速度稳定后匀速通过试验区。

a 系统安装 b 去掉一个单体的覆土轮图10 系统试验机具Fig.10 The test equipment
播种机通过后, 在未覆土的播种行中均匀随机测量沟槽深度作为播种深度。测量播深时, 将开沟器推出的松散土壤刮掉, 以地表的初始平面为测量基准。然而, 真实的播种深度, 应该是在覆土播种行内, 待种子萌芽生长出土后, 连根拔起植株通过测量土壤内下根茎获得(见图11)。因此, 在播种行内, 待种子发芽后, 以2 m为间隔掘出幼苗25株, 测量种子的播种深度。不同作业速度下所测量的播深结果如图11所示。

a 9 km/h速度下关闭调节系统试验响应 b 9 km/h速度下开启调节系统试验响应图11 播深响应结果Fig.11 The depth response results
从图11中可以看出, 随着作业速度的提升, 播种深度控制误差也逐渐增大。系统在9 km/h的作业速度下, 主动播深调节的控制误差范围在±9 mm内, 被动播深调节的控制误差范围在±15 mm内。由此可知, 被动调节和主动调节均能根据地表起伏进行播深调节, 但加载播种深度智能调节系统的主动作业比被动作业在播深控制误差上降低了40%。这是因为被动调节完全依赖于四连杆的浮动仿形, 其在土壤紧实度过大或有秸秆、残茬阻碍的行进区域, 播种机的圆盘刀也因切割力不足, 难以深入到设定深度。而笔者设计的调节系统在一定程度上降低了土壤空间差异性和播种单体自重变化对播深的影响, 提升了播种机的仿形、切割能力。
沟槽深度并不是真实的播种深度, 一方面是因为种子在机械掉落下很难保证正好落在沟槽内; 另一方面是因为播种机的覆土厚度与镇压力度也会影响播深。从试验结果可以看出, 真实的播种深度偏离目标播种深度的程度范围与沟槽测量深度的偏差并不大。
3 结 语
基于Flex传感器和Mamdani模糊模型开发了一套免耕播种机播种深度智能调节系统。应用Flex传感器与地面接触所产生的峰值信号检测播种单体的对地压力。播种机载重测试结果表明, Flex传感器输出的峰值信号与载重质量呈近似线性关系。在播深调节应用上构建了Mamdani模糊模型, 实现了播种深度的智能动态调节。系统仿真结果表明, 该模型具有良好的对地压力变化跟随性, 满足播深调控需求。田间试验结果表明, 笔者设计的播深调节系统在9 km/h作业速度下的播深控制精度均优于被动作业方式, 实现了播种机作业性能的改善。
