新型SAR实时成像光学系统设计
2020-11-05蔡志鹏张星祥毕国玲王洪钧
蔡志鹏, 张星祥, 陈 哲, 毕国玲, 王洪钧
(中国科学院 长春光学精密机械与物理研究所,吉林 长春130033)
1 引 言
合成孔径雷达(SAR)具有全天时、全天候以及适应各种复杂恶劣天气工作的能力,是非常重要的遥感成像技术,可以用于目标识别、跟踪等任务。星载SAR数据实时成像系统是星载SAR系统在许多先进应用中的关键技术。图像的机载分析可以提供有效的特征识别线索,选择适当的图像进行传输,可以降低对数据传输系统的要求。光学系统由于其并行的处理能力,使得SAR数据实时成像成为可能[1-2]。
SAR第一个光学处理器由球形、圆柱形和锥形透镜串联组成,称为锥形透镜光学处理器,该系统从1957年至1964年被广泛使用。然后开发出斜平面光学处理器,其在多功能性和灵活性方面得到显著改进,并且还生成了像质较好的图像[3-5]。锥形透镜的光学处理器可以从信号处理的角度解释,作用效果为互相关或匹配滤波,而斜平面处理器通常用全息术来理解,利用了菲涅尔近似。
传统的光学处理器系统庞大,很难适用于小型载机或者无人机。但光学处理器的优势随着空间光调制器(SLM)和CCD等器件的发展应运而生,就新一代SAR光学处理器而言,加拿大国家光学研究所(INO)的研究人员在该领域做了大量的研究,并且已经有样机投入使用,有效证明了SAR光学处理器的可行性和发展前景,该样机使用了先进的光学元件SLM转换SAR原始数据,被用于实时处理ENVISAT卫星上的ASAR产生的SAR原始数据,但不能进行其他提高分辨率的复杂处理,比如距离多普勒算法(Range Doppler Algorithm, RDA)中的距离徙动校正(Range Cell Migration Correction, RCMC)和二次相位压缩(Secondary Range Compression, SRC)[6-8]。上海交通大学对SAR光学处理器也进行了研究,提出了一种区别于加拿大光学实验室提出的光学处理器,该处理器采用4f光学结构进行傅里叶变换处理,利用频谱面上的SLM完成SAR相关成像算法[9]。目前,国内使用的SAR实时成像方法在功耗、体积、处理速度和稳定性方面都不能很好地满足SAR在轨实时成像需求,也没有适用于星载使用的SAR数据实时成像光学处理器模型。
本文在利用SLM的基础上,以斜平面处理器为依托,设计系统长度更小的SAR数据实时成像光学系统。有效缩短了系统的长度、口径和重量,从而可以实现星载或无人机等探测的实时成像。
2 SAR成像光学处理器原理模型
2.1 SAR数据记录
SLM本质上是二维透射(或反射)的波前调制器件。SLM由很多小液晶盒组成,它们在空间上排列成二维阵列[9-10]。每个小液晶盒由各自的电信号或光信号控制,由于液晶的电学性质,这些信号的变化会影响盒内液晶的排列,从而改变小盒的光学性质。这样照射在小盒表面的激光就受到相应的幅度或相位调制。利用该特性转化SAR原始信号后,代替传统光学处理器中的胶片。但是不能在同一块SLM上同时实现相位和幅度的调制,因此需要两块共同作用。现将SAR数据的幅度信息调制到第一块SLM上,第二块在相位模式下运行,利用平行光将第一块SLM上的幅度信息调制到第二块SLM上,使其具有完整的SAR数据,作用和胶片的作用此时完全相同,但调制时间为SLM光电转化的时间,可视为实时转化,以此作为SAR数据实时成像光学系统的输入。利用CCD或CMOS相机作为SAR图像的接收装置。
星载SAR的工作原理如图1所示,载机的飞行方向称为距离向,与飞行方向正交的测量方向称为方位向。

图1 SAR系统的几何关系图Fig.1 Geometric relationship of SAR system
SLM经过调制携带完整的SAR数据,即地面上的点目标散射的回波生成的二维线性调频信号,其作用相当于一个全息干板。经过平行光照射时会发生聚焦作用。对于距离向信号,聚焦焦距fr:
(1)
对于方位向信号,聚焦焦距fa:
(2)
式中,λl为光波波长,Kr为发射信号的调频率,q为SLM距离向缩尺比,λl为光波波长,R为测量点和接收点之间的距离,p为方位向缩尺比。
2.2 SAR数据光学处理
由式(1)和式(2)可知,两个方向的聚焦情况有很大的不同,其中距离向聚焦焦距为一常数,即距离焦平面为一垂直平面,方位向聚焦焦距和R成正比,并且R随着载机的运动是不断变化的,因此方位焦平面是一倾斜平面。一般来说,这两个平面的位置是不重合的。同时,原始数据是来自多个目标的信号在SLM上重叠得到的,为了区分这些目标,提高分辨率并生成最终的图像,需要对距离向和方位向压缩原始数据,在光学处理器中为傅里叶变化。针对以上问题,提出了SAR数据光学处理器的理论结构。SAR数据实时成像光学处理器原理模型如图2所示。主要解决的问题是:
(1)对不重合的距离焦平面和方位焦平面成像位置的校正;
(2)对方位焦平面倾斜角的校正;

(4)实现距离向信号压缩,即对信号执行傅里叶变化。

图2 SAR数据实时成像光学系统原理图Fig.2 Principle of SAR data real-time imaging optical system
在光学处理中,两个球面镜为焦距相等的球面镜,用来对距离向信号进行压缩,成像的同时还需要具有傅里叶变换功能。柱透镜部分和球面镜共同作用,对方位向进行压缩。两个方向的作用效果不同,将不重合焦平面校正到同一位置的同时,利用望远系统横向放大率和纵向放大率不同的能力,校正方位焦平面的倾斜角。两个焦平面同时进行互不干扰的处理过程,像平面对应相机,即CCD或CMOS。又由于望远镜校正倾角的能力有限,不能将倾斜平面校正到完全直立的状态,需要将SLM引入一个较小的倾斜角度,使得两个焦平面成像后的像面完全重合。
3 新型SAR数据实时成像光学处理器
3.1 球面镜设计
球面镜部分处理距离焦平面时,由于距离焦平面为一垂直的平面,不需要对其进行倾角的校正,因此选择焦距相同的双镜望远系统,又因为想对距离向进行信号压缩和空间滤波,提高成像质量,因此球面镜还具有傅里叶变换的功能。由于傅里叶透镜与传统的成像透镜不同[11-12],设计时需要注意以下几点:
(1)傅里叶变换透镜必须对两对共轭位置校正除畸变以外的全部像差,一对是以输入面处衍射后的平行光作为物方(相当于物在无穷远),对应的像方是频谱面;另一对是以输入面作为物体,对应的像方为无穷远处。
(2)傅里叶透镜必须满足正弦条件,即在设计时需要令平行入射后经过傅里叶透镜折射后输出光线的主光线平行于光轴。
(3)为了避免相干噪声,在设计时应该尽量减少镜片的数量,结构紧凑。
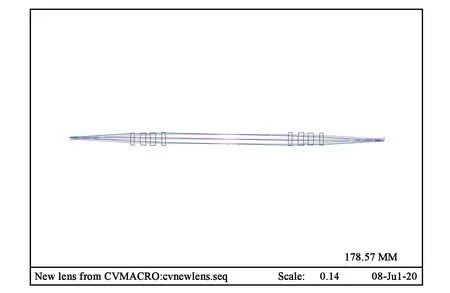
本文在设计时采用了四组元全对称的设计方法,设计时要注意入瞳的直径要略大于SLM的斜直径,否则方位向由于方位焦距过大,光束较为发散,容易造成口径不够的情况。在反复多次的尝试后,选择入瞳直径为30 mm,焦距为350 mm,视场角为2w=6°的傅里叶透镜结构,设计结构参数见表1,光学系统结构和成像质量如图3所示。
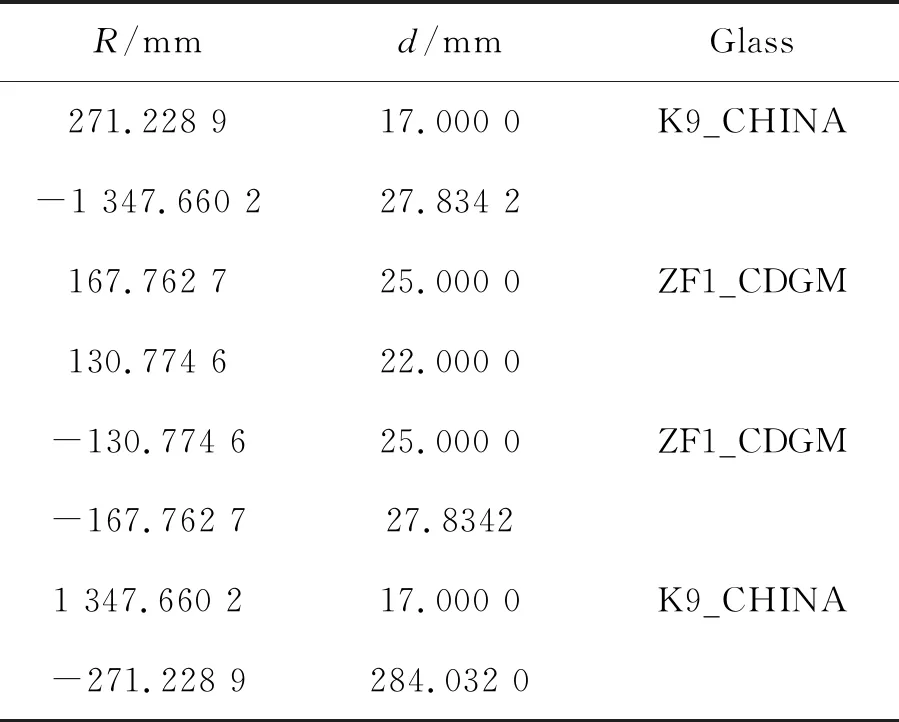
表1 傅里叶透镜结构参数Tab.1 Structure parameters of Fourier lens

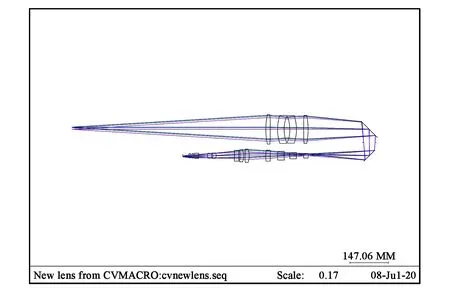
(a)傅里叶透镜结构(a)Structure of Fourier lens
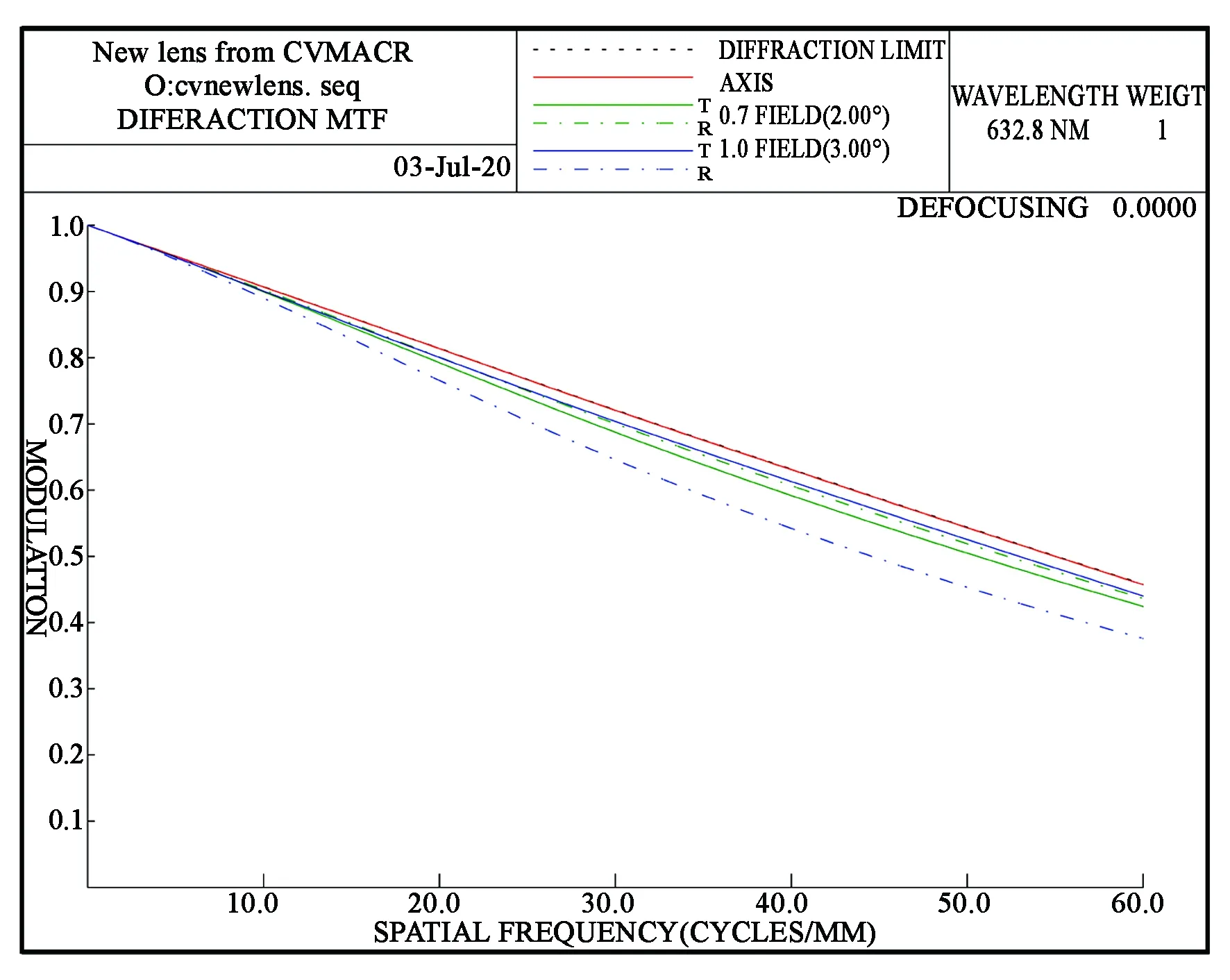
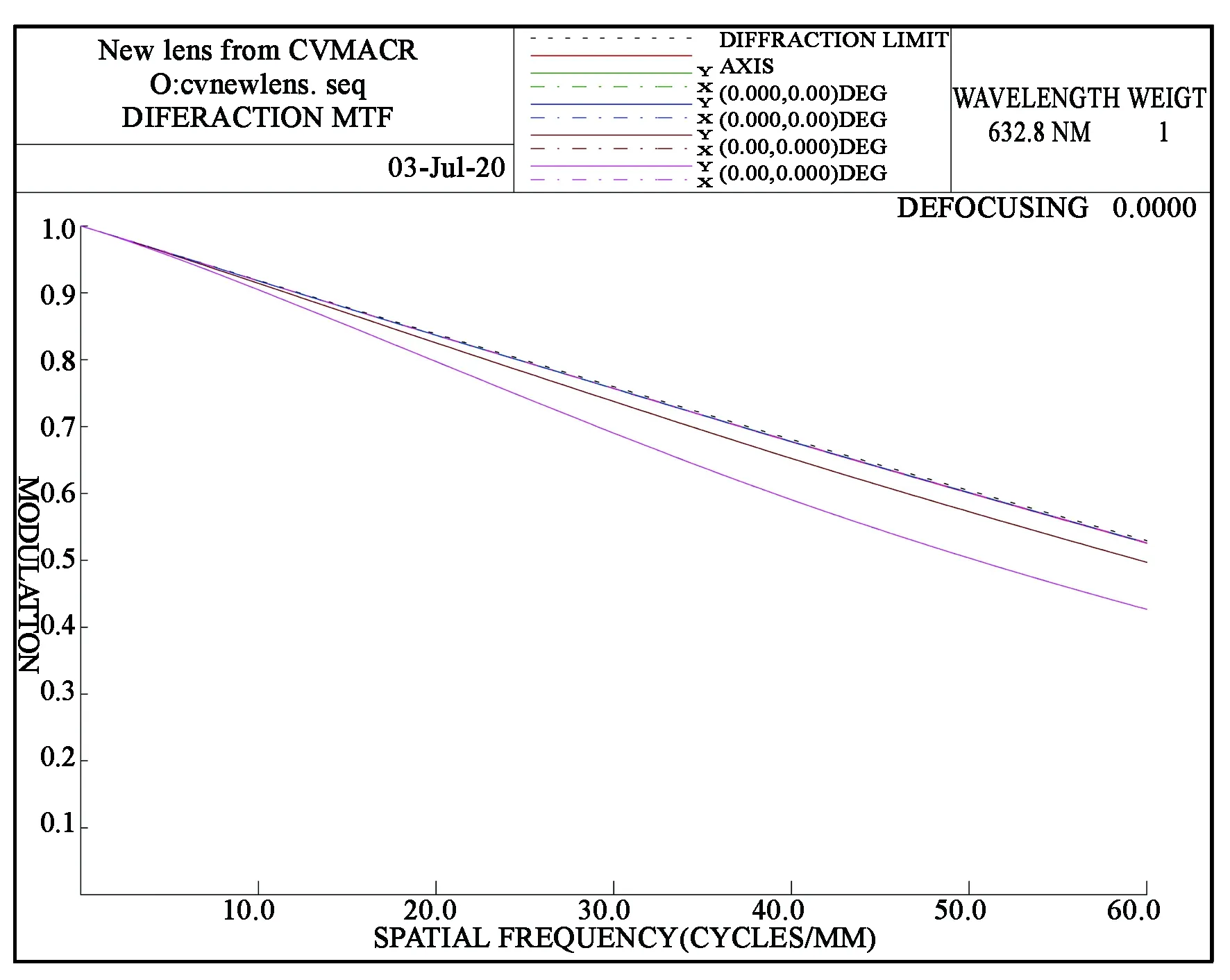
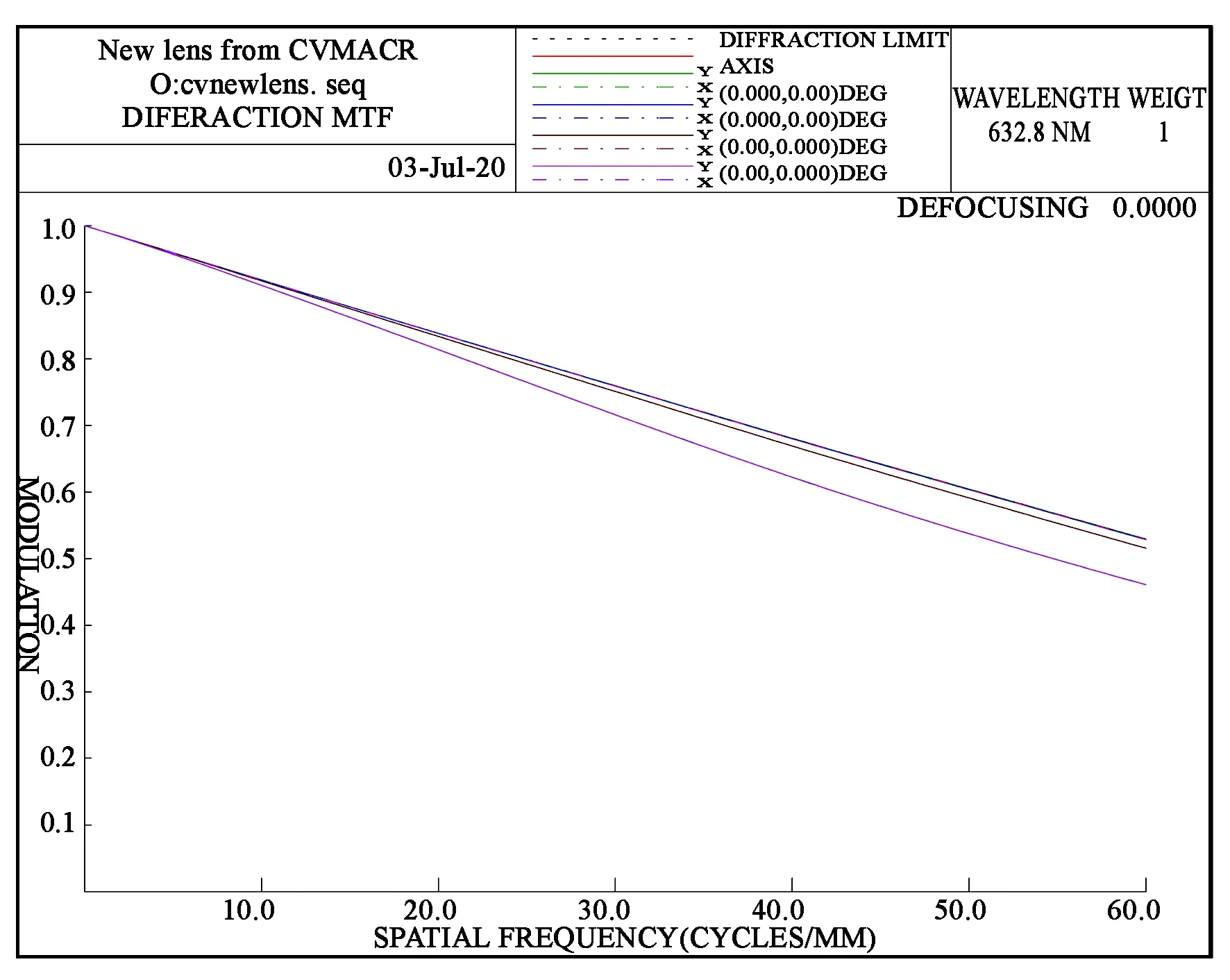
(b)傅里叶透镜MTF(b)MTF of Fourier lens图3 傅里叶透镜结构和MTFFig.3 Structure and MTF of Fourier lens
(a)球面镜结构(a)Structure of spherical mirror
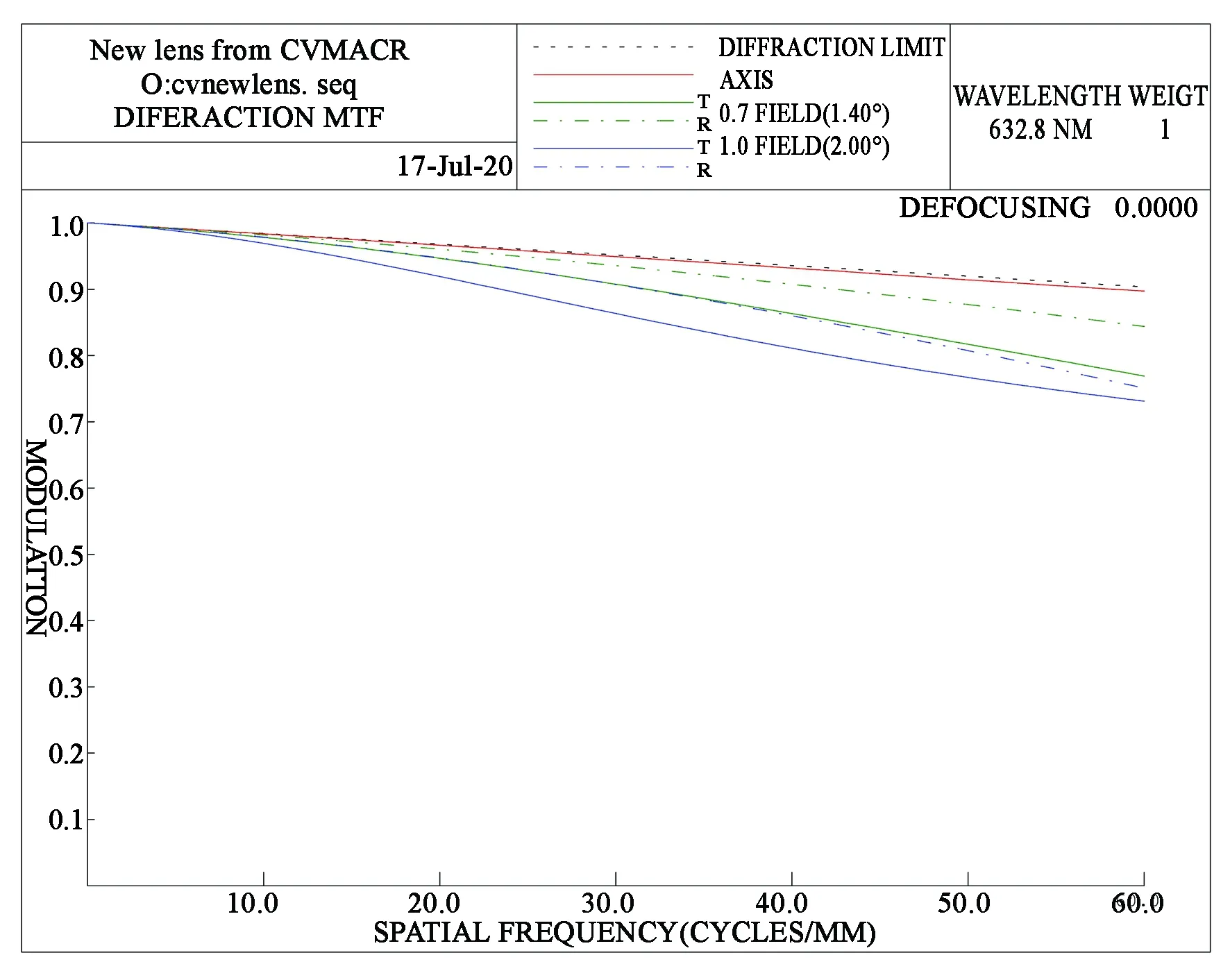
(b)球面镜MTF(b)MTF of spherical mirror图4 球面镜结构和MTFFig.4 Structure and MTF of spherical mirror
设计结果满足使用要求,因为需要焦距相等的望远系统,为了设计和制造简单,球面镜部分使用设计好的四组元全对称结构,此时光阑放置在频谱面。球面镜部分设计结果和成像质量如图4所示。
3.2 柱透镜设计
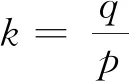

表2 柱透镜结构参数Tab.2 Structure parameters of cylindrical lens

(a)柱透镜结构(a)Structure of cylindrical lens
(b)柱透镜MTF(b)MTF of cylindrical lens图5 柱透镜结构和MTFFig.5 Structure and MTF of cylindrical lens
3.3 合成优化
该系统相对于传统的成像系统略有不同。该系统是对一个二维分开的物体成像,因此在合成后的成像质量要分成两个方向分别优化评价。其中,距离向可以看作是球面镜和平行平板作用共同成像,平行平板只会造成成像位置的偏移,不会对像质造成大的影响,也不会因为平行平板位置的改变而改变像质和成像位置。所以距离向不需要太多的调整就可以达到较好的成像质量。因此先考虑方位向成像优化。
对于方位向成像优化,我们将SLM放置在球面镜的前焦距上,且经过处理,可以令距离向焦距fr=0,方位向焦距fa=457 mm,即聚焦后的方位向焦平面距离球面镜的前焦平面(即SLM前)457 mm处,聚焦后的距离焦平面与SLM重合,优化结果如图6所示。

(a)方位向结构(a)Structure of azimuth
(b)方位向MTF(b)MTF of azimut图6 方位向结构和MTFFig.6 Structure and MTF of azimuth
在此,为了获得较好的成像质量,采用两块非球面进行辅助优化。优化时选择第四块柱透镜的第一个面和第五块柱透镜的第二个面作为非球面。且优化后,球面镜和柱面镜之间的间隔为63.682 4 mm,该间隔在方位向成像质量优化好的基础上不可以再改动。非球面系数见表3。
距离向即相当于物在球面镜的前焦平面上,球面镜和平行平板共同作用成像,只需要将方位向结构中柱透镜部分曲率半径设置为无限,非球面变为球面即可,其结果和MTF如图7所示。
经过优化设计,已经得到较好的成像系统,该系统在不加光源的情况下总长约为1 400 mm,需要较大空间,不便于使用和机载,因此在空间上应该对其进行光路偏折,减少空间占用体积。反射镜选择放置在球面镜关于光阑对称位置。因为球面镜之间的光线相对其他位置而言,主光线入射角度小,可以更好地控制反射镜的角度。另外,球面镜之间的距离较长,除了在光阑处进行滤波外,不进行任何操作,这一部分空间利用率不高,且占据大部分系统长度。综合以上两点,偏折光路的反射镜以光阑为中心对称放置,放置距离以透镜之间上下不重叠为设置依据。本文设置为平面反射镜距离光阑50 mm对称放置,偏心角度均为45°。由傅里叶透镜设计可知,主光线经过傅里叶透镜作用后主光线平行于光轴,因此偏心角度设置为45°即可。但是对于方位焦平面,这样偏折会影响成像质量,需要对方位向进一步优化,以提高成像质量。优化时还是只将原来的两个非球面的非球面系数作为变量进行优化,但优化不能达到成像要求。因此考虑再加一片非球面进行优化。经过考虑,选择第七块柱透镜的第二个表面作为非球面参与优化,优化约束条件仍然是球面镜第一个面到像面之间的总长,优化后系统满足成像要求。设计优化结果如图8所示。3个面二次曲线系数见表4。

表3 非球面系数

(a)距离向结构(a)Structure of range
(b)距离向MTF(b)MTF of range图7 距离向结构和MTFFig.7 Structure and MTF of range

(a)距离向结构 (a)Structure of range
(b)方位向结构(b)Structure of azimuthal

(c)距离向MTF(c)MTF of range

(d)方位向MTF(d)MTF of azimuthal
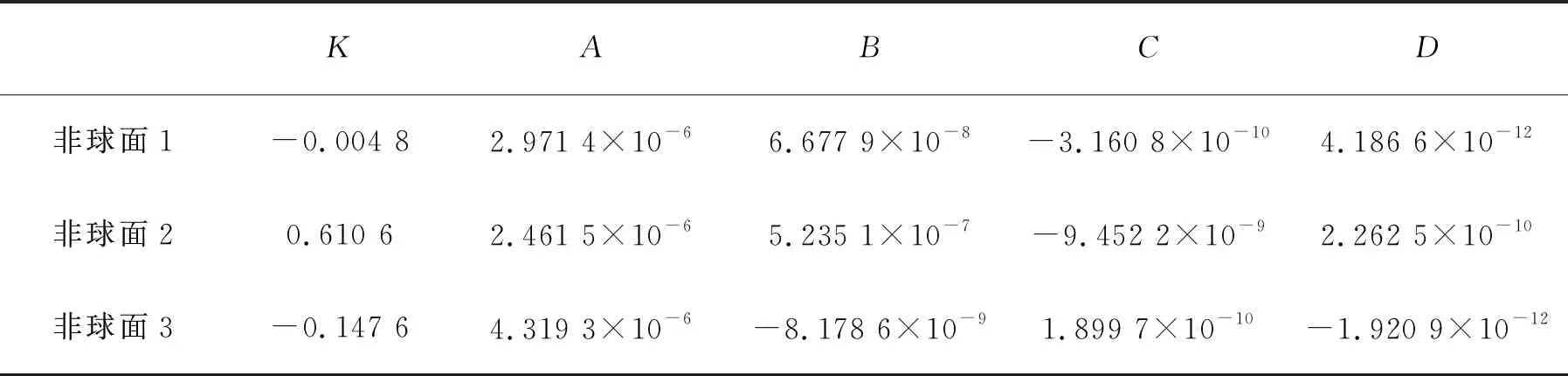
表4 非球面系数Tab.4 Coefficient of aspheric
优化后,系统的长度由规划前的1 400 mm,变为700 mm左右,大大缩短了系统所占长度,有利于SAR成像系统机载使用。
3.4 倾角校正
令方位焦平面和SLM之间的夹角为β,由于望远系统横向和纵向放大率不同,具有校正倾斜平面的能力,但校正能力有限,不能将倾斜的平面完全校正到直立状态,因此将SLM倾斜α°,此时,方位焦平面与垂直方向的夹角为βα,如图9所示。
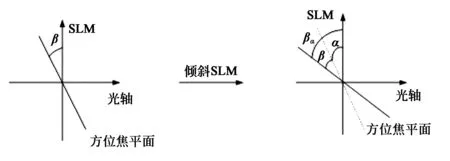
图9 SLM倾斜示意图Fig.9 Diagram of SLM
由于在方位向,望远系统的横向放大率为-1,纵向放大率为-1/k2,所以经过该望远系统后,倾斜角会有改变,想要校正倾斜角重合,则应该使具有βα倾斜角的方位焦平面和具有α′倾角的SLM的像面重合,且由于球面镜部分放大率为1,则α=α′。由图8的几何关系可知βα和α′的关系为:
(3)
(4)
根据式(3)、(4)、(5)可知:
(5)
带入SAR相关参数,求得α=0.011 37″,此时倾角非常小,对像质不会产生很大影响。
4 像质分析
4.1 波像差
一个完善成像的光学系统可以实现点物成点像,物像对应的均为球面波。而一个有像差的系统的实际波面和理想球面波之间存在差异,这个差异就是波像差。当光学系统最大波像差低于1/4波长时,就可以说该系统是完善成像系统。在系统设计中,波像差(系统设计的残差)会直接影响系统的装调和测试,因此一个好的光学系统还必须要对波像差严格控制。优化后系统波像差如图10所示。
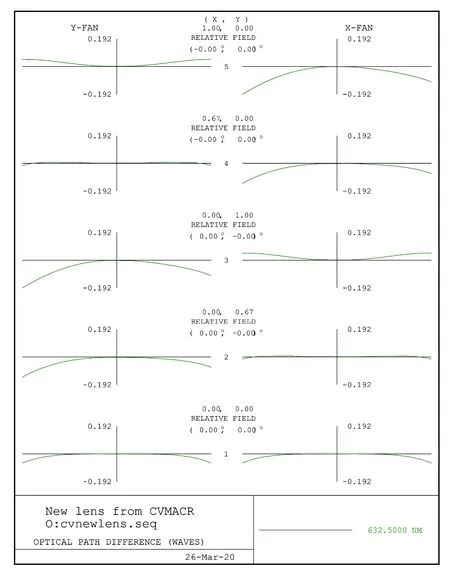
(a)距离向波像差(a)Wave aberration of range
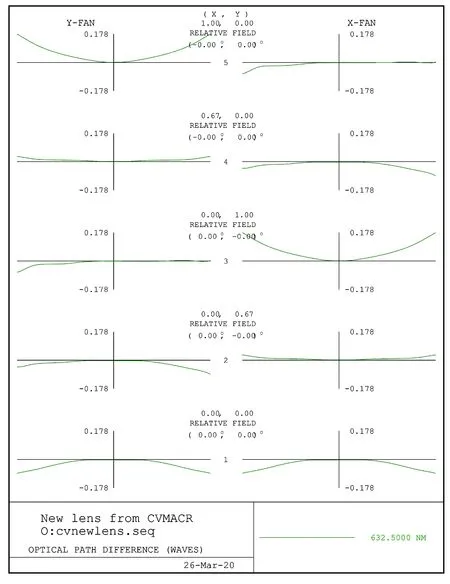
(b)方位向波像差(b)Wave aberration of azimuthal图10 波像差Fig.10 Wave aberration
由图10可以看出,距离向和方位向波像差均小于1/4波长,其中距离向波像差小于0.192波长,方位向小于0.175波长,则可视该系统成完善像,满足设计使用要求。
4.2 公差分析
SAR数据实时成像光学处理器公差主要考虑技术指标要求以及现加工能力,选择在60 lp/mm空间频率处,以允许的MTF下降量为准则来制定光学系统公差。系统公差分析图如图11所示。

(a)距离向公差(a)Tolerance of distance
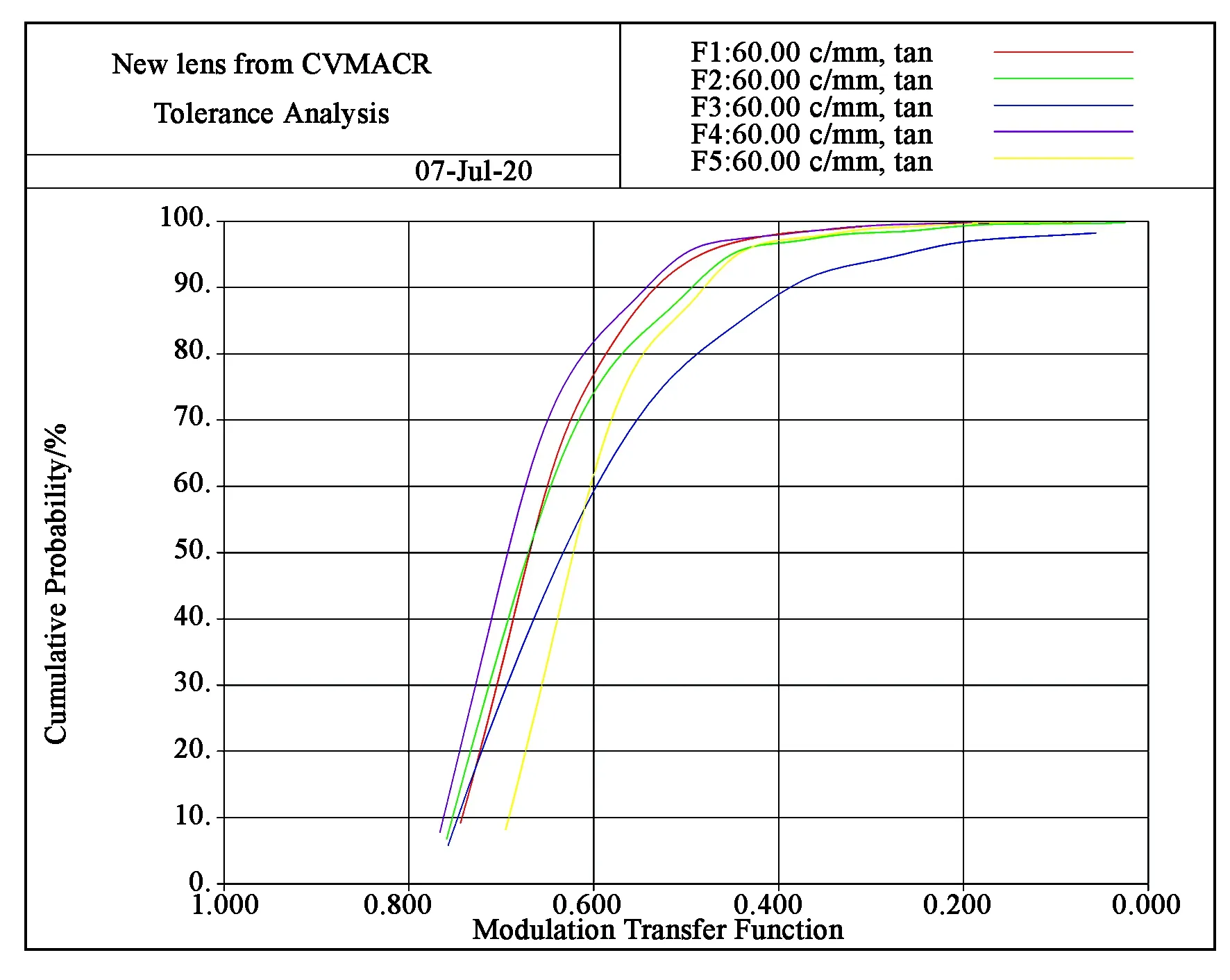
(b) 方位向公差(b)Tolerance of azimuth
由公差分析图的结果可知,距离向和方位向在截止频率处,都有超过90%的概率装调到MTF大于0.4以上,满足装调要求。
4.3 非球面加工可行性分析
非球面相对于球面镜来说,加工难度相对较大,而非球面度可以较为直接地体现非球面加工的可行性。在code V中利用加工数据表设置非球面最大高度计算非球面的非球面度。系统中3个非球面的非球面度部分结果见表5所示。
由表5的非球面度可知,3个非球面的非球面度均小于9 μm,且非球面系数也较小,具有实际加工的可行性。
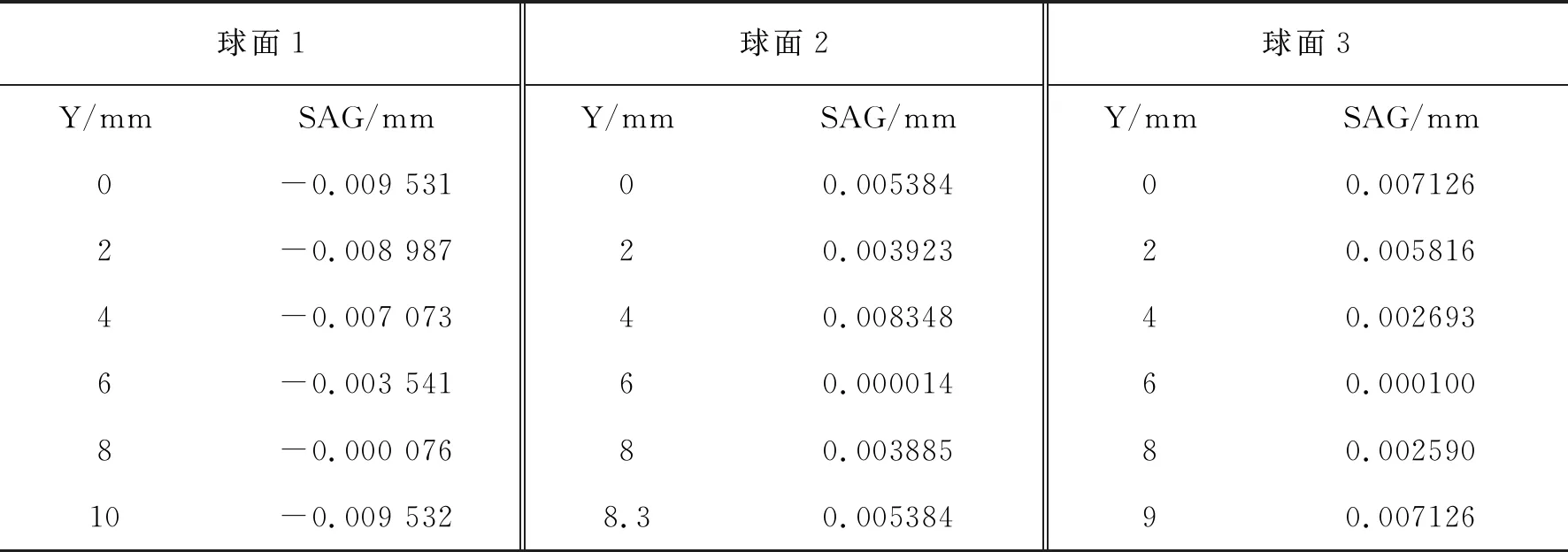
表5 非球面度Tab.5 Results of asphericity
5 结 论
针对现在SAR实时成像的需求,在利用先进光学元件的基础上,设计了SAR数据实时成像光学处理器。本文在倾斜面光学处理器中应用SLM作为SAR数据的输入,真正意义上实现了光学处理器并行处理和实时处理的能力。由于SLM的体积也小于传统的胶片,系统在一定程度上变得轻巧。成像速度近似等于SLM的转化信息的速度。同时对系统进行了规划,将系统的长度从1 400 mm缩减到700 mm左右,有利于实现星载或机载使用,且系统成像质量较好,系统MTF在截止频率内大于0.4,波像差小于1/4波长。