大型高精度车载式施药机的伺服带宽研究
2020-11-05贾功流
贾功流
(安徽省康禾农林病虫害综合防治有限公司,安徽 合肥230000)
随着各行病虫害是导致农产品产量降低的主要原因之一,在施药机械中,系统控制能力起着决定性作用,它是施药机械自动喷施、提高农药利用率的关键性部件,也是实现多角度精准施药控制的核心部件。但是,从施药机械现状来看,采用纯手动控制、低精度控制的系统控制方式较多,所以,提升施药机械控制系统精度,使其控制效果及其实用化更符合用户要求成为关键性问题。
本文针对新型车载式大型施药系统,将三路闭环控制方法应用到施药机传动系统的伺服控制中,设计了伺服控制器,经仿真研究,该控制器具有较高带宽和响应能力。
1 结构设计及组成
系统由载车及施药机组成。施药机由转台及喷药筒组成。转台主要由电机、减速机、编码器,双片齿轮,驱动齿轮、扇形齿轮,等组成。电机经减速机带动小齿轮,从而带动扇形齿轮,实现天线座的旋转。材料选用铸铝ZL201。
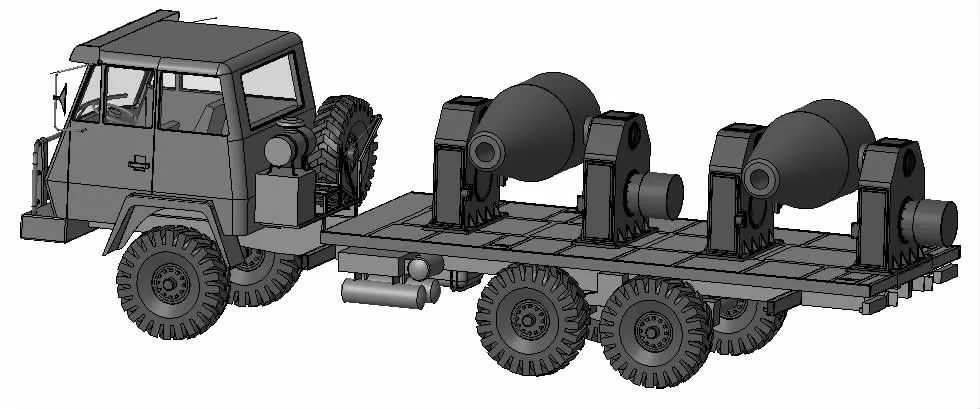
图1 车载式施药机结构布局图
设计的转台要求支座具有高的刚度,负载部分需要低的转动惯量,这样可以有效地降低轴系驱动电机的驱动力矩,同时可以进一步提高系统的动态响应指标,俯仰支座负责支撑喷药筒,负载及驱动电机,其设计的优劣直接关系到整个天线座的稳定性和精度。必须稳固扎实,因此要有较大的质量和较高的固定频率。转台内部结构如图2 所示。
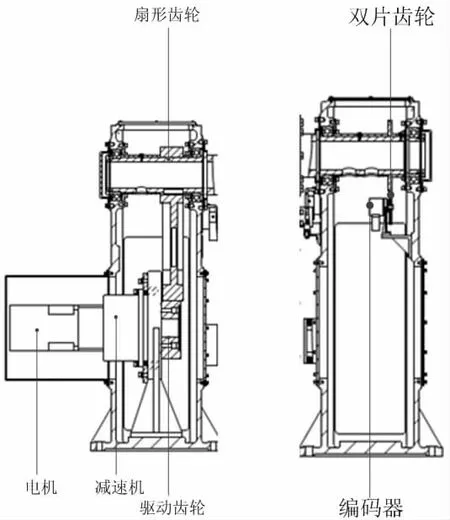
图2 驱动机构组成图
2 系统建模
首先建立系统的等效模型,在模型的基础上根据系统要求的性能指标对系统的电流闭环、速度闭环、位置闭环进行了设计与仿真。采用串联校正的方法设计雷达三闭环控制系统,通过三环各自的开环特性分析系统的稳定性能,在三闭环控制系统设计过程中,采用的从内环到外环逐步设计的方法,按照控制要求设计控制器,可以保证每个控制环都是稳定的,内环能够抑制电机电流和速度的扰动,减小对位置回路的影响。在由内环到外环的等效过程中,三个回路的截止频率由内到外逐渐减小,位置环的截止频率最低,这样设计会在一定程度上降低系统的响应速度,降低了位置回路的带宽。
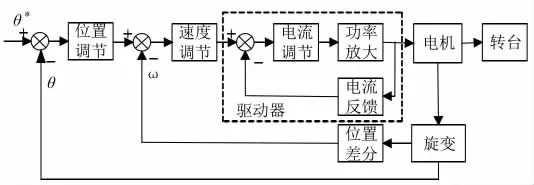
图3 伺服系统组成
本节首先通过机理建模方法,分别给出放大电路、直流伺服电机的数学模型,最后在机械系统动力学方程基础上建立整体的数学模型。
放大电路:
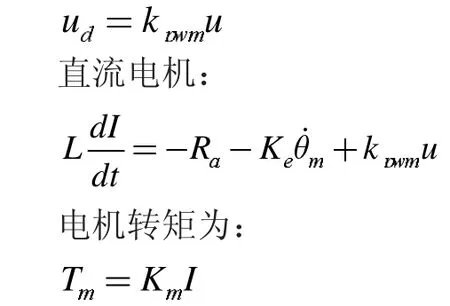
上式中,Ke为反电动势系数,kpwn为放大系数,Ra为电枢电阻,L 表示电枢电感,I 表示电枢电流,Km为力矩传递系数。
因此,先设计电流控制器,然后把整个电流环看作是速度控制环中的一个环节设计速度控制器,最后把整个速度环看作位置环中的一个环节设计位置控制器。并依据以下框图在SIMULINK 中建立系统仿真模型。
3 仿真分析
位置环的作用是通过给定的脉冲指令使电机准确定位,并且电机的转速与位置完全由给定脉冲来决定,通过设定的目标位置与电机的实际位置相比较,利用其偏差通过位置调节器来产生电机的速度指令,从而保证系统静态精度和动态跟踪的性能。则要求位置环定位精度要高且响应无超调。
通过位置环阶跃响应可以看出,超调量为9.8%,上升时间0.576s。通过闭环bode 图判定位置环闭环稳定,位置闭环带宽达到2.2Hz,见图4 及图5。也可以调整控制器参数,使带宽为0.5Hz 和1Hz,可满足宽范围带宽变化要求。
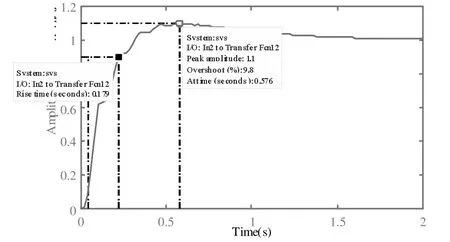
图4 位置环阶跃响应
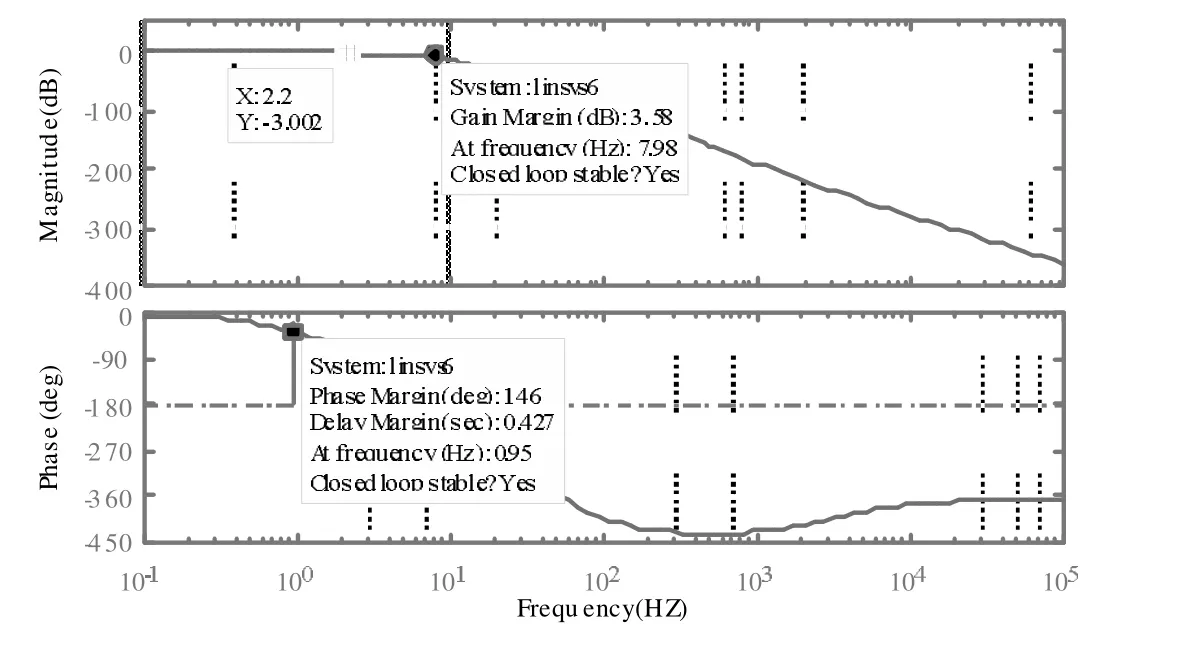
图5 位置环BODE 图
4 结论
本文描述了高精度闭环控制施药机的结构形式、组成及控制系统。根据系统要求的性能指标对系统的电流闭环、速度闭环、位置闭环进行了设计与仿真。通过阶跃仿真及BODE 图仿真,获得了可调带宽的传动能力,达到了理想的跟踪效果。该系统结构简单、可靠,在大型高精度车载式施药机的伺服系统中具有应用价值。
