集成电子液压制动系统用永磁同步电机复合弱磁方法
2020-11-05李建涛杨继斌徐晓惠冉晓珂
李建涛 杨继斌* 徐晓惠 冉晓珂
(西华大学汽车与交通学院,四川 成都610065)
集成式电子液压制动系统(I-EHB)助力功能要求表贴式永磁同步电机(SPMSM)能够快速准确地响应驾驶员的踩踏动作,主动制动功能要求快速响应到目标压力。在紧急制动工况下,SPMSM在达到一定转速时无法继续上升[1],主动制动模式下会出现压力响应速度慢,汽车制动距离长。为解决这个问题需要采用弱磁算法,进一步提高SPMSM转速[2]。
弱磁控制算法分为依赖电机参数和不依赖电机参数的方法。依赖电机参数的方法有模型公式计算法、梯度下降法,存在计算复杂、获取准确电机参数困难、电机参数受工况影响的问题,难以用于工程中。不依赖电机参数的方法有查表法、电压反馈法[3]。查表法能提升电机的快速响应能力[4],但存在测量过程复杂和标定点不能涵盖所有的电机工作点的缺点。电压反馈法能保证电机一定运行在电压极限圆上,能够实现电机的最优运行,但是电机的动态响应速度很慢。
因此,本文针对I-EHB 对电机动态响应的需求,结合查表法和电压反馈法的优点,提出了一种查表结合电压负反馈的SPMSM复合弱磁方法。
1 弱磁控制在I-EHB 的应用
I-EHB 基本控制框图如图1 所示,制动助力&主动制动控制模块根据反应盘主副面位移差信号、SPMSM 绝对位置信号θr和主缸压力信号,计算得到SPMSM目标力矩Te*。弱磁控制模块根据目标力矩和电机转子机械角速度ωr计算得到目标d、q 轴电流。SPMSM采用矢量控制,静止三相坐标系上的电机定子电流经过ClarK 和ParK 变换得到同步旋转坐标上的d、q 轴实际电流,d、q 轴电流误差经过PI 控制器得到d、q 轴目标电压值,进行电机矢量控制,最后通过三相逆变电路实现对SPMSM动态转矩控制[5]。
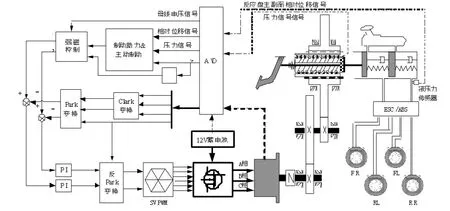
图1 I-EHB 整体控制框图
传统电压负反馈弱磁控制如图2 所示。当ΔV<0,电机反电动势高于逆变器所能提供的最大值,电流环PI 控制器进入饱和状态,需要进行弱磁控制,电压误差ΔV经过PI 控制器后得到目标电流i*dl。由于电压负反馈法只在电压饱和区域附近工作,当SPMSM迅速进入弱磁区或负载突然增加时,电压负反馈控制响应会出现滞后,d 轴电流上升慢,电机动态响应差,还会导致电流环PI 调节器在短时间内饱和,引起d、q 轴电流振荡,输出扭矩的变化,会影响驾驶员的制动感觉。
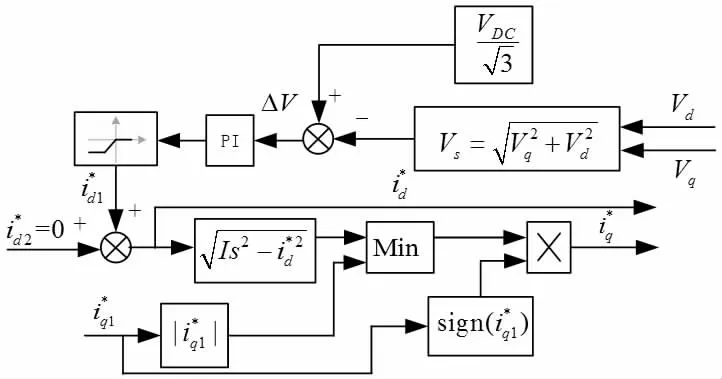
图2 传统电压负反馈弱磁控制框图
2 复合弱磁控制器设计


图3 复合弱磁SPMSM 控制框图
模糊控制器以反应盘主副面位移差误差及其变化率作为输入量,PI 控制器的参数KP、KI作为输出量。误差exr论域和误差变化率dexr论域采用7 个模糊变量,模糊集为{NB、NM、NS、ZO、PS、PM、PB},其中:NB、NM、NS、ZO、PS、PM、PB 分别代表较负大、负中、负小、零、正小、正中、正大。KP、KI参数论域采用5 个模糊变量,模糊集为{VS、S、M、B、VB},其中:VS、S、M、B、VB 分别代表较小、小、中、大、较大。模糊语言输入、输出变量采用三角形隶属度函数。据经验和知觉推理制定模糊控制规则,如表1、表2 所示,再通过面积中心法转化为清晰量。
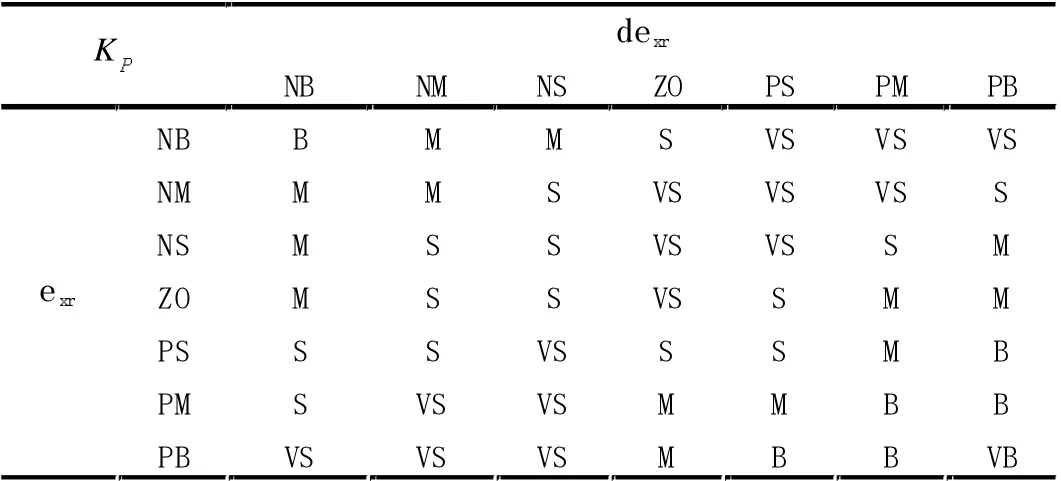
表1 KP 模糊规则表
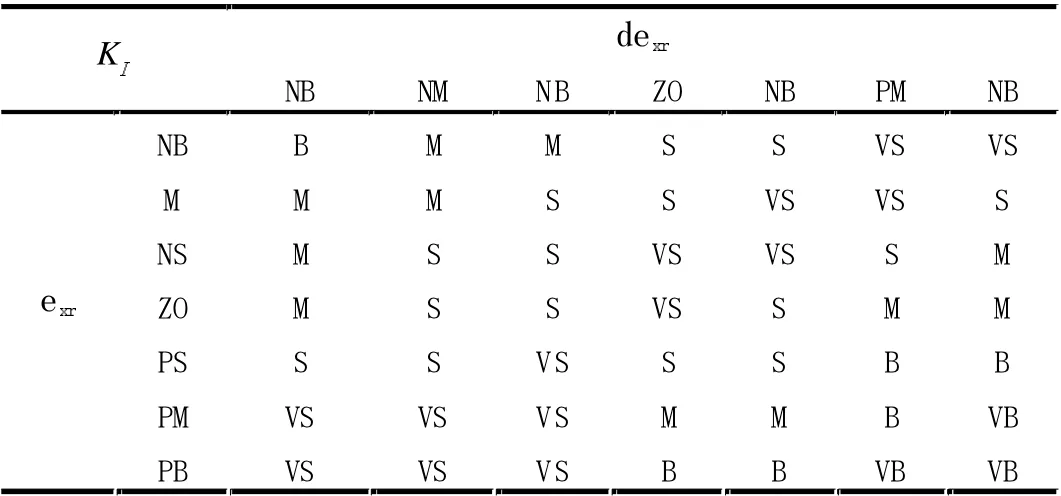
表2 KI 模糊规则表
3 实验
实验台架如图4 所示,主要参数如表3 所示,制动主缸与四个鼓式制动相连。
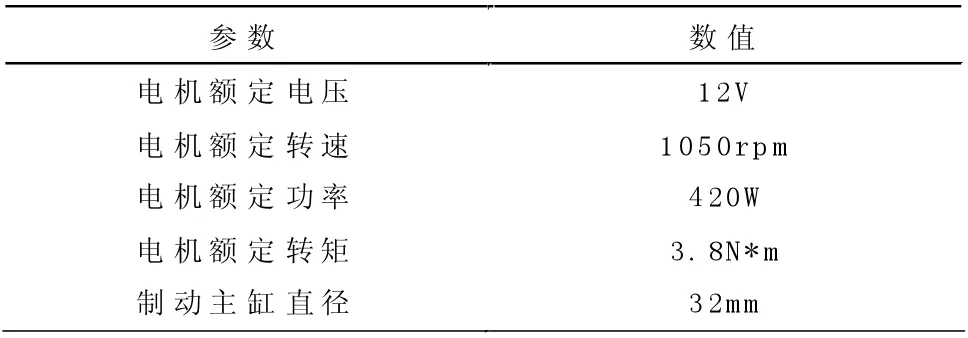
表3 I-EHB 台架主要参数
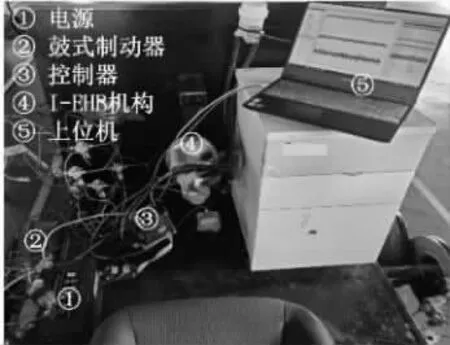
图4 I-EHB 实验台架
分别对传统弱磁算法和复合弱磁算法进行q 轴电流阶跃响应实验,结果如图5、图6 所示。复合弱磁方法速度响应更快,在高转速区域持续时间更长,压力到达10Mpa 的时间更短,约为310ms。复合弱磁方法在q 轴电流阶跃响应末端,id 绝对值减小的速度更加缓和,加上目标id 对目标iq 的微调整,实际iq 超调更小,避免对控制器和I-EHB 机构造成损坏。

图5 I-EHB 复合弱磁

图6 I-EHB 传统弱磁
4 结论
通过分析传统弱磁控制在I-EHB 机构上动态性能不佳的原因,提出了一种查表结合电压负反馈的弱磁控制方法。I-EHB台架测试表明复合弱磁方法方法压力响应更快,q 轴电流超调小,具有实用性。
