舰载机着舰模拟训练系统设计
2020-11-05刘剑超林亚军
刘剑超,汪 节,林亚军,吕 游,穆 杨
(海军航空大学 教练机模拟训练中心, 辽宁 葫芦岛 125001)
舰载机着舰是航母作战能力形成的重要因素,着舰是具有高精度和高风险的飞行训练项目,着舰距离短且过程中还会受到舰运动、舰尾流等的影响。利用实装训练,不但受自然条件约束明显,而且训练风险极大和训练成本高昂。因此,采用着舰模拟训练系统,可有效提高飞行员的着舰操控技术水平,替代部分实装训练、减少事故率,具有非常现实的意义。于兴雷等[1]对舰船运动模型的视景仿真进行了研究,于凤全等[2]研究了舰载直升机飞行模拟器飞行仿真系统,田角荣等[3]研究了舰载机陆基FCLP训练模拟系统。国外在舰载机着舰研究方面进行的较早,尤其是美军,经历了惨痛的教训,也因此收获了丰富的经验。本文主要是借鉴国外相关技术经验,系统的对我国舰载机着舰过程进行了模拟仿真,研制了舰载机着舰飞行模拟训练系统。本文主要从着舰飞行模拟器的整体需求、分系统设计、飞行仿真验证等方面进行叙述。
1 整体设计
整体设计的功能需求为:
1) 模拟舰面与“空中”操作训练。模拟舰面座舱实习、通电检查;模拟在“空中”进行座舱设备的空中操作与使用程序的训练。
2) 模拟多种引导方式的着舰训练。完成LSO(Landing Signal Officer,着舰信号指挥官)引导、光学引导、仪表半自动引导、自动着舰引导下的着舰、复飞、逃逸、特情等科目的训练。
3) 模拟训练数据的记录与处理。系统可记录模拟着舰飞行训练中的有关数据,并载入着舰相关飞行状态数据,进行回放,并依据着舰规范、着舰飞行品质等标准,通过智能算法,完成着舰飞行训练的评估。
图1中各个子系统的组成和功能:教员控制台是模拟器的大脑,进行人机交互,输入输出信息。引导子系统包含人工、半自动、自动等引导方式,主要是根据舰载机位置偏差。座舱及操纵子系统,包括座舱人机接口系统和驾驶杆、油门、方向舵等操纵设备。飞行/推力控制子系统和飞行仿真子系统,是根据当前的任务设置和飞行状态,解算飞机模型和碰撞检测模型。视景子系统能完成三维环境仿真和平视显示器画面生成与叠加,提供多视角舰载机着舰情况;音响子系统完成模拟训练中的有关音响仿真;仪表子系统主要对舰载机仪表进行仿真模拟,采取图形仪表和实装仪表改装相结合的方式;振动子系统是模拟舰载机着舰过程中简单的触舰感觉;过载子系统主要是计算飞行员在着舰过程中各个阶段的过载情况;教员控制台完成任务管理、条件参数设置、故障设置、数据记录、仿真再现,数据输出及评估,模拟LSO指挥等功能。
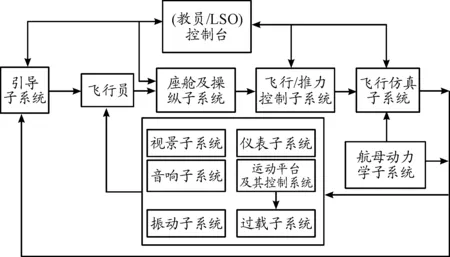
图1 系统框图
图1中系统的联动机制:引导子系统通过FLOLS光学信号或仪表数据,为飞行员提供着舰下滑道的高度误差信号和侧向偏差信号;飞行员根据此误差信号,通过模拟座舱的操纵装置(驾驶杆、油门杆、方向舵等),输入控制量;飞行/推力控制子系统采集和接收飞行员的操纵量,计算舵面偏转值和推力值;飞行仿真子系统接收舵面偏转值和推力值作为输入,并根据舰载机的动力学模型,实时计算着舰飞行状态,并将此状态反馈给飞行/推力控制子系统,形成控制上的闭环;航母动力学子系统计算航母的六自由度运动状态;舰载机飞行状态和航母运动状态,会共同输入到视景子系统、仪表子系统等中,驱动视景和仪表等的工作,进而为飞行员提供实时反馈信号;教员控制台,在着舰模拟飞行中,飞行教员能进行着舰模态的选择、着舰环境设置等操作,并根据控制台的实时着舰态势,通过语音与飞行员联系,模拟真实着舰中,舰面LSO等人员与飞行员间的指挥交流。
2 各子系统设计
2.1 引导子系统
模拟器中包含了上述4种着舰引导方式,分别是自动着舰引导、 ILS(Instrument Landing System,仪表着舰系统)引导、FLOLS(Fresnel Lens Optical Landing System,菲涅尔透镜着舰系统)着舰引导、LSO引导等,以模拟训练飞行员在各类引导方式下的操纵。一般实际中,会根据需要对不同引导方式进行组合使用,如美军的全天候引导系统有4种工作模式。模态I采用自动着舰引导;模态IA采用自动着舰引导至3/4海里处,切换为FLOLS引导;模态II采用ILS引导3/4海里处,切换为FLOLS引导;模态III为舰上控制进场,主要是LSO引导。模态I工作时,模态II、III处于监控和备用的状态;模态II工作时,模态III处于监控和备用的状态。
1) 自动着舰引导建模。主要是雷达引导建模和引导律建模。雷达引导建模包含4次坐标转换、平台数字稳定和雷达(测距/测角)噪声建模;引导律建模,采用工程基于α-β-γ滤波器的PIDD(Proportion Integration Differential Differential,比例+积分+微分+微分)引导律,用于滤除雷达主要工作频段的噪声,并根据高度误差和侧向偏离等,来运算引导指令(俯仰角指令和滚转角指令),指令经过数据链延迟模型,后传送给飞控系统模块。过程中,若飞行员操纵驾驶杆或油门杆,系统将切断自动引导方式,转入其他引导方式。
2) ILS引导建模。主要是仪表引导建模和平台数字稳定。ILS引导建模要完成两次坐标转换,并用数字稳定消除甲板运动的影响,最后生成偏差信号(下滑角偏差和方位角偏差),发送到模拟座舱中的仪表中。飞行员根据着舰误差的大小及极性,来操纵飞行模拟着舰。
3) FLOLS着舰引导建模。主要是FLOLS稳定模式建模、FLOLS稳定模式建模、工作逻辑建模、FLOLS视景建模。FLOLS稳定主要是消除甲板运动对FLOLS平台的影响,稳定模式包含惯性稳定模式、直线稳定模式和点稳定模式。工作逻辑建模,是根据飞机的高度误差/侧向偏离、飞机距离理想着舰点的实际距离、以及FLOLS平台稳定方式,来运算出纵向和侧向各偏离多少灯球,并将信号,传送给视景子系统,驱动点亮瞄准灯。
4) LSO着舰引导建模。 模拟器中,设置了两种LSO着舰引导模式,一个是自然人LSO语音引导和人工智能LSO语音引导。在引导控制方式中,LSO是最高权限。
自然人LSO语音引导:该模式下,LSO通过模拟器的教员控制台,观察着舰视景画面和中线摄像机信息,判断飞机在下滑道的偏差,利用电话语音系统,给模拟座舱中的飞行员下达飞行指令。
人工智能LSO语音引导:若无LSO在场,可选用计算机人工智能LSO代替。人工智能LSO根据飞行轨迹、舰载机特性、甲板运动和飞行员状态等,得出飞机所需的调整量,并映射为LSO指令,语音发送给飞行员,如图2所示。人工智能LSO开发时,会用大量输入输出进行训练和检验。
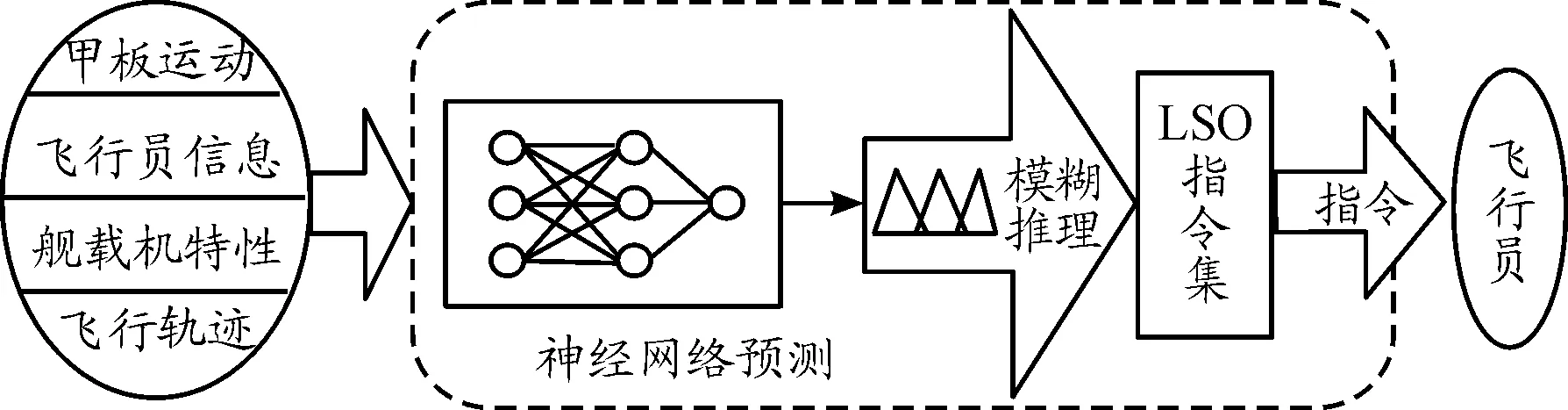
图2 LSO模型框图
2.2 座舱及操作子系统
模拟座舱系统舱内布局与真实飞机基本一致。所有操纵、控制、显示、指示设备均采用模拟件,满足要求:所有控制装置的控制方式、操控范围、力感、系统响应等与真实舰载机保持一致;控制设备的布局、外形要与真实舰载机一致;所有显示/指示设备的显示逻辑、显示方式等要与真实舰载机保持一致。
驾驶杆、方向舵等操纵采用弹簧载荷来模拟操纵特性。模拟仪表的外观和特性与实装一致。在具体分析仪表的结构和工作机理的基础上,设计接口和驱动电路。主控将模拟信号传递给仪表驱动板上的单片机,转换成频率和脉冲等参数,通过放大和驱动后,控制电机运动,仿真仪表工作。
2.3 飞行/推力控制子系统
1) 飞行控制系统。 飞行控制系统的实现,有两种方法:使用舰载机实装的飞行控制系统(飞控计算机和执行机构),缺点是成本太高;全数字化仿真,缺点是难以仿真固有的非线性环节,但能具有一定的精度。
可采用FLIGHTLAB软件中的CSGE模块,对飞行控制系统进行建模:
飞行控制律模型:着舰时三轴姿态控制/保持、三轴姿态角速率控制/保持、计算延时模型、应急机械操纵模型、自动着舰模态下飞控与舰上引导系统交联。
模态切换模型:着舰引导控制切换的的平缓处理。
执行机构模型:可建立具体液压助力模型等,也可用二阶系统加非线性环节来描述其动力学。
传感器模型:包含迎角、姿态角、风速、气压高度等传感器模型,以及误差和噪声模型,传感器故障模型。
2) 推力控制系统。舰载机着舰反区飞行,轨迹不稳定且动力学耦合复杂,飞行员常采用反区操纵方法来控制舰载机,或采用自动油门(常为速度保持)。需结合具体的油门、发动机、飞机的模型,设计推力控制律和控制系统等。
2.4 飞行仿真子系统
根据舰载机气动模型数据和舵面操纵输入,计算出飞行状态下的气动力、气动力矩;根据发动机模型及油门输入,得到飞行状态下的发动机推力;将力和力矩输入到动力学和运动学方程中,可以得出着舰状态输出。风场模型是通过气动学影响舰载机的力、力矩输出。拦阻情况关系着舰品质和安全,起落架模型和拦阻模型可以仿真出飞机触舰拦阻情况。建模需注意以下几个方面(图3)。
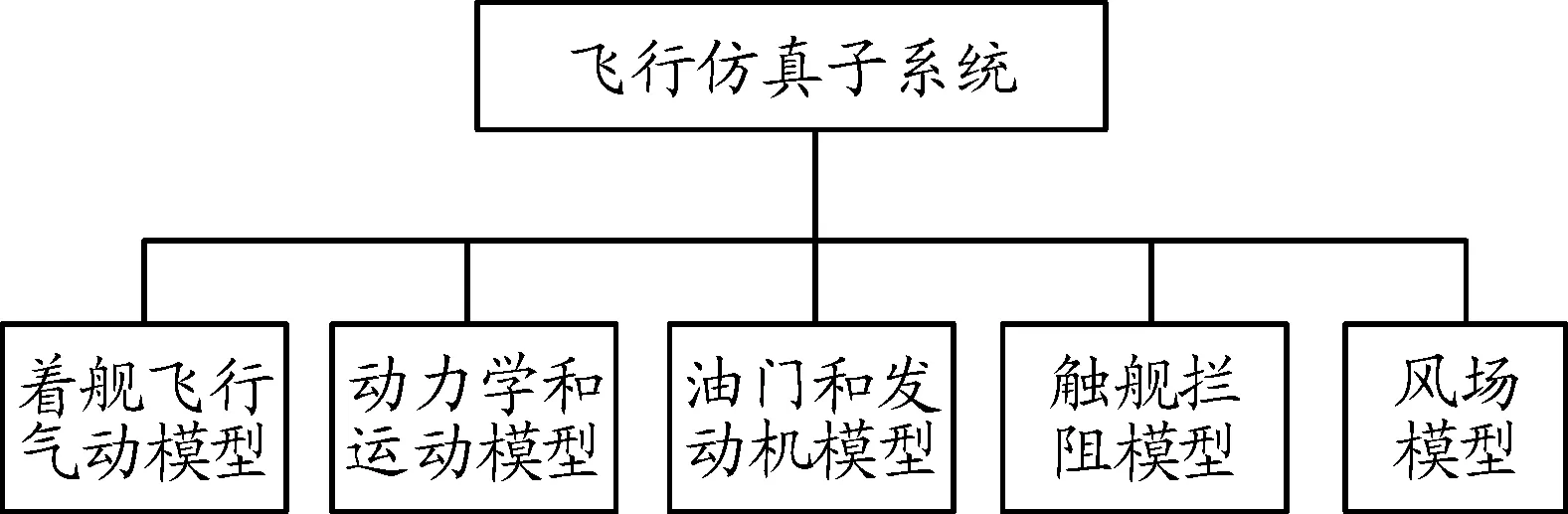
图3 飞行仿真子系统模块
1) 气动模型的精确性是飞行仿真的关键,气动模型中需包含减速板、增升装置、起落架、滑流、“舰面效应”等的气动数据。
2) 动力学和运动学模型。航迹轴系下建立模拟器质心运动方程如下:
(1)
机体轴系中建立绕质心转动的动力学方程:
区别于阿斯顿·马丁旗舰车型DB11,全新Vantage兼具了造型的美感和强劲的性能。这辆颇有GT感觉的运动跑车在听觉、美学方面所成就的造诣令人向往,飞驰的快感通过莱卡(Lycra)纤维材质制成的座椅传递至驾驶者的身体,配合着高亢的发动机声线,英伦品牌独到的魅力此时被彰显得淋漓尽致。
(2)
由式(1),通过矩阵转换,可得质心速度在地面轴系上的投影,再对各分速度进行积分,即可得到质心位置在空间中的变化规律,也就是质心运动学方程:
(3)
利用式(2)和式(3),采用欧拉角表示法建立转动运动学方程:
(4)
2) 发动机推力特性模型。舰载机在下滑阶段,处于气动反区上,轨迹不稳定,常采用“反区操纵”的方式,要求发动机的小油门响应好且延迟小。另外,发动机加速性能对舰载机的逃逸/复飞模拟训练很关键。
3) 精确模拟触舰拦阻动力学模型。起落架建模中仿真起落架缓冲器和轮胎的触舰受力情况;拦阻索采用柔性物体建模,模拟在不同形变下的状态;按照尾钩与舰载机相对位置关系,模拟尾钩与拦阻索之间的碰撞关系及相互动力学。
4) 风场模型。包括低空飞行大气紊流、舰艏上洗气流、甲板风、斜角甲板产生的侧洗气流、舰尾气流、剪切风等的模型。
2.5 航母子系统
1) 航母模型。建立航母六自由度运动学模型、动力学模型、航母减摇控制系统模型。建立航母的数据库,包括航母几何外形数据、惯性数据等。
2) 海浪模型。为了模拟海浪对舰运动的影响,应建立不同海况、不同等级海浪和不同形式海浪的数学模型及数据库。采用Gerstner模型实现了动态海洋,并且渲染碎波和泡沫效果。
X=X0+sin(KX-wt)
Y=Acos(KX-wt)
其中,K表示波浪向量,它是一个橫向量,用来表示海浪运动方向的点,另外有一个和波浪长度相关的度量k:
如图4所示,当kr>1∶0时,波形会出现交叉,当kr≤1∶0时,波形为正常的波形。再下一图表示某时刻下Gerstner波粒子的空间位置。由图4可知,Gerstner波具有波峰海浪粒子密,波谷海浪粒子稀疏,该特性在构建海洋表面网格时能够更好刻画波峰的细节信息。单独的Gerstner波模拟出来的海浪的效果并不是很好,因此可以累加不同参数的波来模拟出不同的海浪运动。
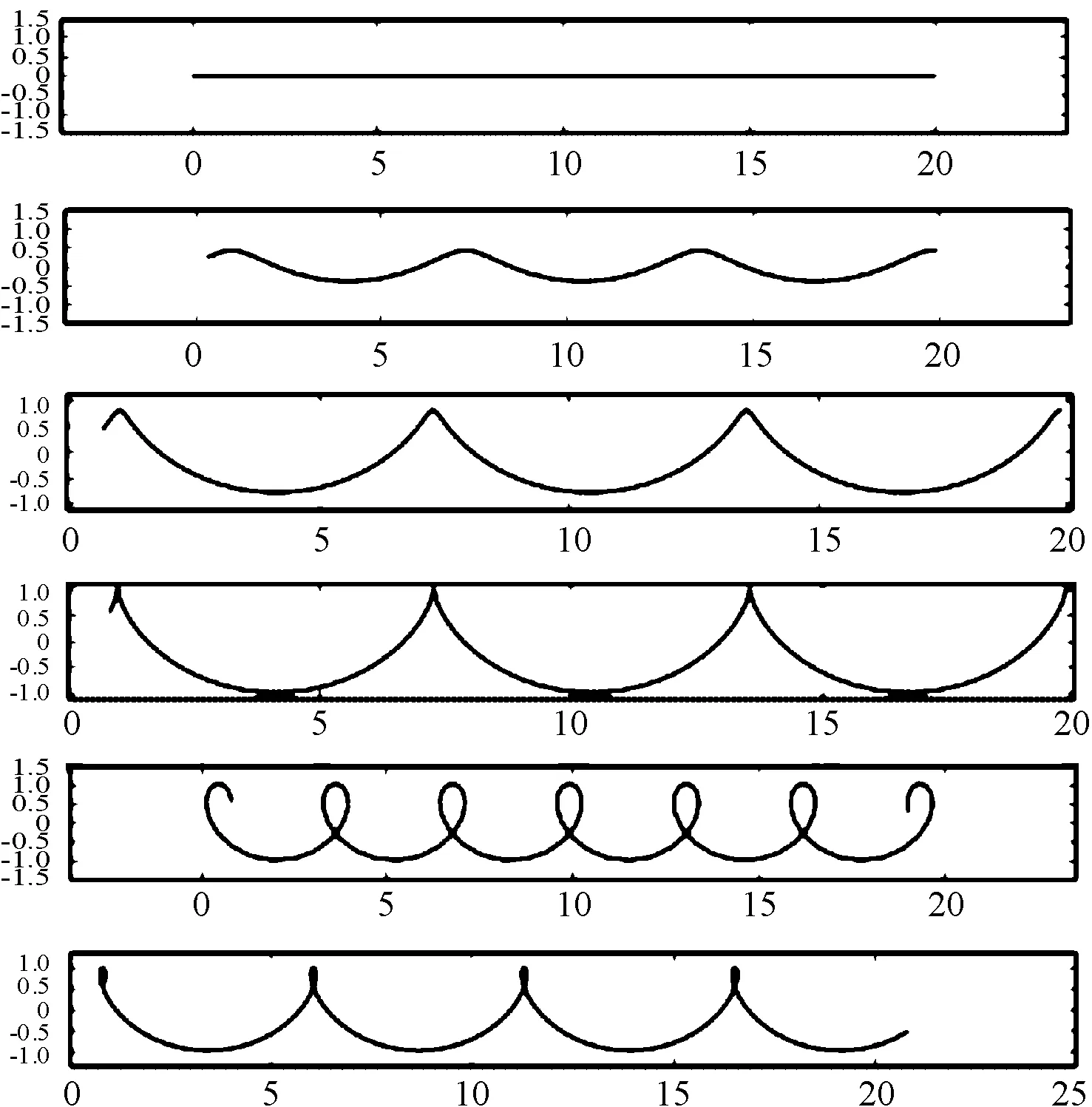
图4 海浪运动模拟曲线
2.6 视景子系统
视景子系统,须完成三维着舰环境仿真和舰载机平视显示器画面生成与叠加,对于其他视角(如LSO),也能提供相应的飞机和发动机画面。三维环境仿真通过实时渲染,产生座舱外景象,包括天空、大海、航母、助降设备、拦阻索等,并模拟气象条件、能见度、昼夜晨昏的景象,使飞行员有高的沉浸感觉。其中,对于光学助降设备FLOLS,必须能根据光学助降系统工作逻辑,并根据当前飞行状态、飞机位置、航母运动等相关参数驱动点亮光学助降系统的信号灯,提供给飞行员进行观察判断。并且,飞行员视角的肉球移动速度能符合与飞机相对运动的实际几何关系。
视景计算机接收舰载机和航母的位置、姿态和运动信息,以及教控台的控制信息,实时调用场景数据库和目标数据库。经过整套CGI的多边形处理和几何处理后,进行纹理像素的解算合成,形成实时的场景图像,经过视频处理后送出RGB信号,经投影显示出逼真的视景图像。为了以60帧/秒显示分辨率1 280*1 024像素,利用并行计算技术,采用6台工控机流水处理视景数据,其中1台作为主视景计算机(图5)。
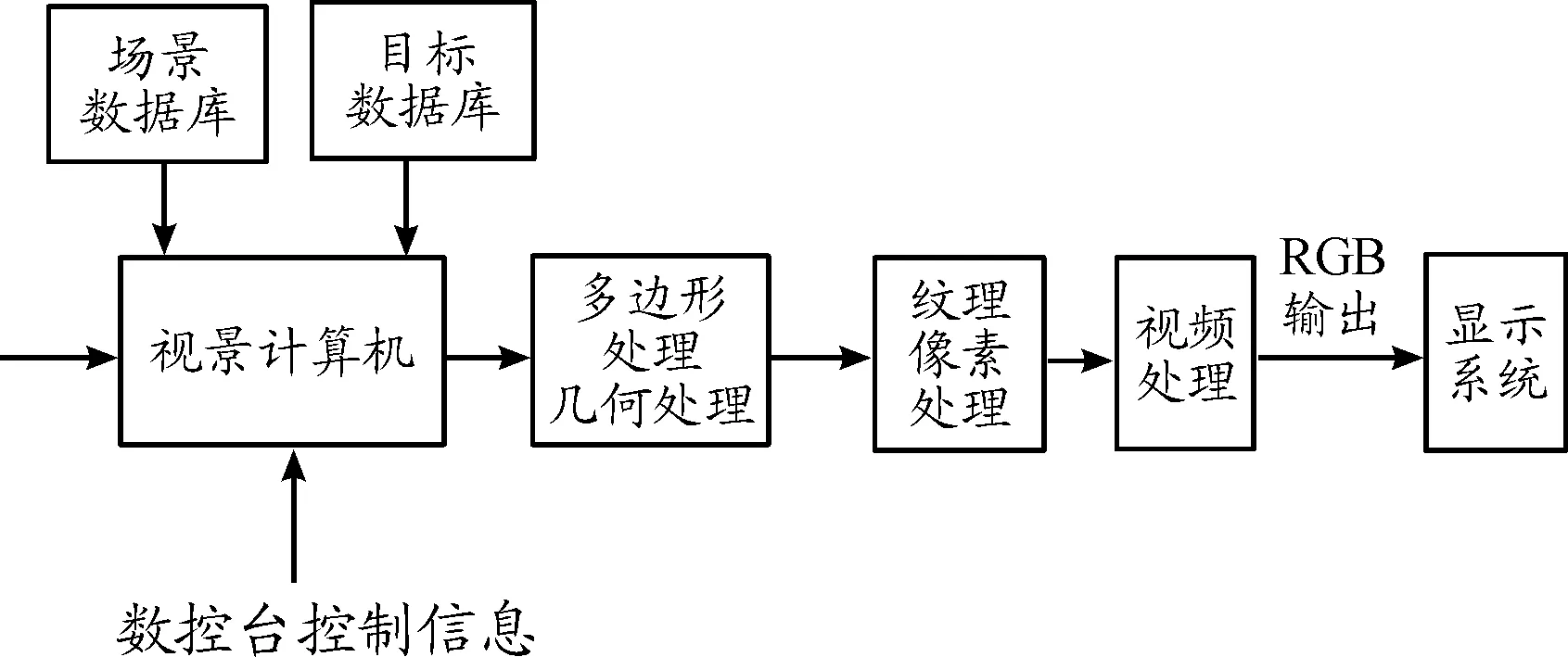
图5 视景计算流程框图
场景数据库的设计,主要是充分利用航拍数据,并采用Creator 3.0建模工具、Visual C++6.0与 Vega Prime视景仿真平台来实现虚拟场景。首先,虚拟场景中的虚拟三维实体在Creator中的建模;然后将三维实体模型在Vega Prime中生成虚拟场景,并通过Vega Prime 的交互函数对虚拟场景进行控制;最后在Visual C++6.0境下生成界面。
2.7 运动系统
运动系统用来模拟飞机的姿态及速度的变化,以使飞行员的身体感觉到飞机的运动。起飞/着舰时,舰载机在一些方向上存在大过载,而模拟这些过载对舰载机飞行员的训练非常必要。先进的飞行模拟器,其运动系统具有6自由度,即在三维坐标中绕3个轴的转动和3个轴的线位移。主要包括6个电动作动筒及其支撑平台。6个作动筒的协同运动,可驱动平台并使座舱模拟出飞机的运动变化情况。
2.8 音响仿真子系统
音响仿真子系统用于模拟相应设备的声响(如综合航电系统、发动机轰鸣、起落架收放、撞击式着舰等),以及外界环境的声音(机体与气流的摩擦声音、雷雨声)。根据当前的飞行状态,从数据库中提取音响素材,合成为环境声音信号输出。
建立音响的素材数据库和特征数据库。读取设置参数。 建立发动机噪声与发动机工作状态间的关系模型,如低速下滑的发动机慢车和复飞逃逸时的大油门响应等。 读取仿真模块数据后,进行模型解算,实时触发并模拟各种音响输出。
2.9 教员控制台子系统
教员控制台是飞行模拟器的监控中心,各子系统的任务控制信息都来自于控制台。主要用于控制、监控、评估飞行训练,以及实现作为LSO的着舰引导。
1) 着舰任务设置。一是飞行任务设置。如三类环境下进场航线及流程、标称/非标称着舰、复飞逃逸等,特情处置和引导方式切换等。二是飞机状态设置,如初始进场的位置、速度、油量等,着舰的位置偏离,空中飞行故障特情等。三是航母状态设置,着舰时航母航行速度和方向,海况级别和航母角运动参数等。四是飞行环境设置,如甲板风强度、空中风速风向,昼夜、日照、雾。最后是座舱初始化设置,如自检、归零等。
2) 着舰任务控制。任务的运行、暂停、重启动或终止。
3) 着舰态势显示。提供LSO视角的着舰视景和中线摄像机信息,以实现LSO引导。
4) 着舰结果记录、演示和评估。可以通过多视角的切换、快慢放等方法分析飞机着舰的状态变化,用于飞行讲评教学。利用着舰飞行数据与评分标准库,建立一个模糊评估模型,全面评估着舰训练的表现,智能评估系统功能如图6所示。
2.10 主控子系统
主控是整个系统的控制核心,运行实时管理软件,功能包括网络管理、数据交互管理、全局时钟生成与控制等。主控实时管理软件功能分解如图7所示。实时管理软件分主控端与从控端,主控端根据CPU晶振偏离计算精确的时间,用于设置实时网卡的中断以触发各个分系统运行;从控端接收实时网卡中的中断,从而触发应用程序。

图6 智能评估系统功能组成框图
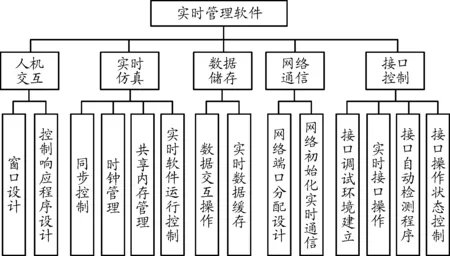
图7 主控实时管理软件功能分解框图
3 飞行仿真系统验证测试
图8是航母视景的运行效果图,正常运行时画面渲染基本流畅,不存在明显的卡、顿现象。
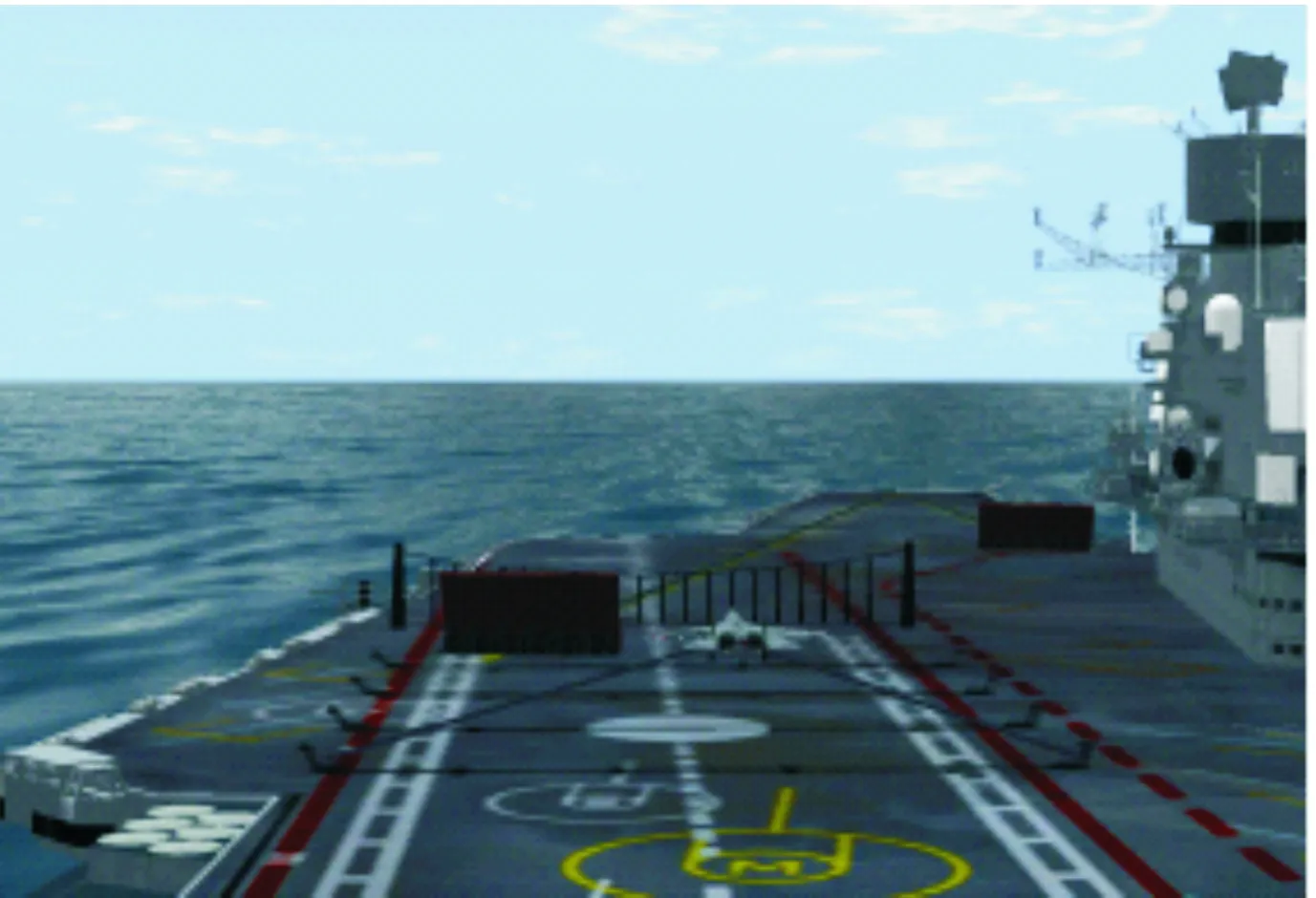
图8 母舰场景及着舰效果图
选择自动着舰引导模式下,设置舰尾流和舰运动的参数,并进行演示验证,且利用教控台生成的着舰飞行状态数据,用MATLAB绘制和分析舰载机着舰过程,如图9所示。
经过仿真对比分析,舰载机着舰系统比较真实的反映了舰载机在着舰过程中飞行姿态和飞行员过载情况。
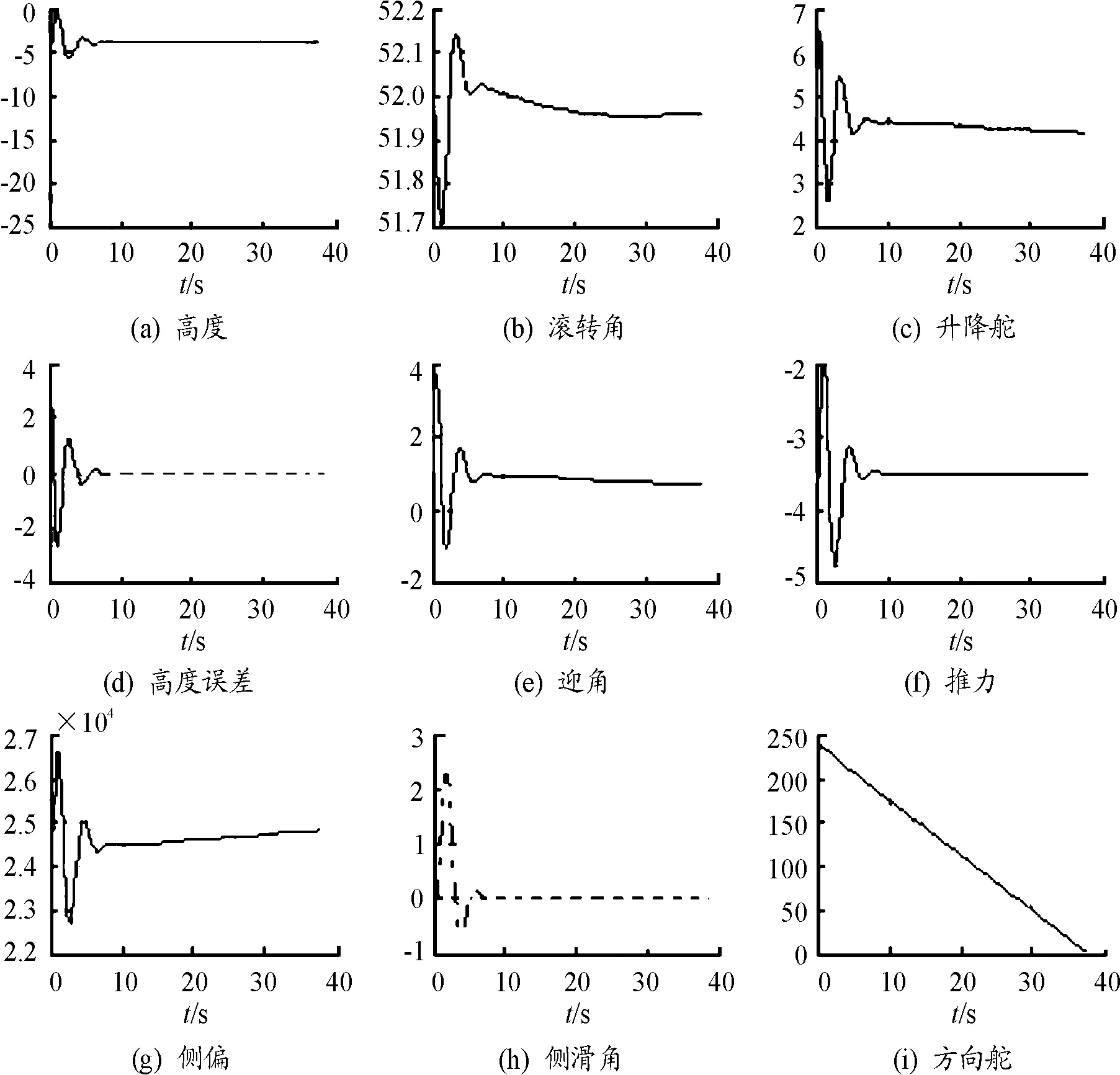
图9 着舰过程仿真曲线
4 结束语
本文针对着舰飞行的特点,从整体设计、子系统设计、着舰飞行仿真验证等方面,描述了着舰飞行模拟器的设计需求、结构配置、功能特点等,该着舰飞行模拟器注重标准化、模块化和层次化设计,便于维护、扩充和系统升级。
