变风量空调系统的内膜解耦控制
2020-11-03倪再玥张九根
倪再玥,张九根,陈 哲,喻 锴
(南京工业大学 电气工程与控制科学学院,江苏 南京 211816)
0 引 言
变风量(variable air volume, VAV)空调系统由于其在控制效果和节能方面的优越性,已经在实际运用中受到了广泛的关注,逐渐成为国内外大型空调系统的主流选择[1]。但是VAV空调系统为多变量时滞系统,各输入输出量之间相互影响,而目前VAV系统的控制方法在设计阶段多为各个回路独立控制,没有考虑到各个回路之间的耦合关系。这样,在系统参数发生改变或者受到外界干扰时,VAV系统的各个回路将会因为耦合变得不稳定,除了影响控制品质外还会导致能耗的增加。
为了解决这一问题徐玮等[2]针对VAV空调系统耦合回路在前馈解耦的基础上进行改进设计了类前馈解耦补偿器与自适应PID控制器。实验结果表明,该控制方法对空调耦合作用有一定消除作用。陈大鹏等[3]建立了VAV空调系统送风温度和室内温度两个耦合回路,针对其采用解析法解耦并详细分析了其控制器的可实现性,在VAV系统双回路耦合问题上取得了不错的控制效果。冯增喜等[4]针对变风量空调各子系统回路耦合严重的问题将前馈补偿与模型自适应控制相结合,设计了MFAC控制器与前馈补偿解耦器。仿真结果表明,该控制方式解耦控制效果令人满意。葛懂林等[5]通过数学解析提出一种改进的对角线解耦方式,该方法能够简化解耦控制器的复杂程度,并通过对所建立的空调系统模型的仿真验证了该解耦方式的有效性。
本文针对内模解耦控制器存在高阶多项式加减运算的复杂形式,提出了改进的AI-PSO算法对广义模型进行降阶。改进的AI-PSO算法对常规PSO算法中的惯性权重进行优化,并提出了使其呈Sigmoid形式自适应下降的策略来提升其寻优效果,并进一步引入多粒子学习策略和人工免疫思想来拓展其寻优过程中粒子的多样程度,避免陷入局部最优解,从而保证降阶模型和原始对象的匹配度。
1 系统耦合回路建模
变风量空调系统是由VAVBOX、AHU及其传输通路、风机盘管与控制回路组成,其所要完成的控制内容主要包括送风温度控制回路、风道静压控制回路、室内温度控制回路和新风量控制回路。
VAV空调系统的各个系统通常都是单独设计的,但是在运行过程中这些单独的系统回路之间相互耦合干扰。本文建立送风温度控制、室内温度控制以及静压控制之间的数学模型。通过对学者的相关研究可以得到机理分析的结果,在南京工业大学建筑智能化研究所内VAV空调系统平台进行阶跃响应测试,得到表1为该系统在夏季工况下稳定运行的实验数据,结合表2的物理参数,可以得耦合系统的矩阵传递函数。
最终得到VAV空调系统的耦合矩阵传递函数G(s)为

表1 季工况下测的实验数据
表2 物理参数

(1)
2 改进的免疫粒子群(AI-PSO)算法
2.1 改进的自适应粒子群算法

(2)
(3)
其中,d=1,2,…D,为解空间的第d维;r1,r2为[0,1]之间的随机数;c1,c2是学习因子,是非负常数,ω是惯性权重。
PSO算法中不合理的惯性权重会导致算法陷入局部最优,并且后期会在最优解附近震荡。较大的惯性权重ω有利于全局搜索适用于迭代初期,较小的ω更有利于局部搜索适用于迭代后期[7]。迭代次数并不直接影响粒子速度的更新步长,粒子是否缩小或增大更新步长应当由其适应值决定。本文采用根据粒子适应度值来自适应调节惯性的方法如式(4)所示
(4)
(5)
N为种群个体数量,ωmin为权重最小值根据研究取0.4[8]。由于fi非负,ω的取值范围为(0.4,0.9)。利用Sigmoid函数的性质,算法初期大致呈指数下降。随着变量增大函数取值趋于饱和,惯性权重下降减慢。这种基于适应度值的非线性惯性权重下降策略能很好满足算法迭代对ω的要求。

(6)

2.2 人工免疫思想
上述改进自适应PSO算法虽然在更新速度和种群多样性上有了一定的改善,但是由于PSO算法缺少淘汰和选择机制,所以其收敛速率和寻优能力还需要进一步提高。因此将基于生物免疫机理的人工免疫(artificial immune)思想引入PSO算法可以加速算法收敛,提高算法寻优能力。
通过在自适应PSO算法引入免疫记忆、细胞死亡和免疫选择等行为,形成AI-PSO算法,具体方案如下:
(1)模仿生物免疫记忆行为:将群体最优粒子作为“免疫疫苗”,免疫疫苗不会被淘汰;
(2)模拟生物细胞自然死亡的过程,对粒子进行自适应筛选,从而对PSO算法加入淘汰机制,加快算法的收敛速度。依据粒子种群多样性γ,筛除M个低适应度抗体
(7)
种群多样性越低,γ越大,筛除的粒子越多,提高算法多样性,防止收敛于局部最优解。算法收敛时γ趋向于1
M=Nβγ
(8)
fi是粒子适应度值,fmax是粒子中最大适应度值,β是死亡因子,β取值范围为(0,0.2)。
(3)免疫选择:在免疫选择前随机生成M+Nd个新粒子,形成总数为N+Nd的群体,模拟生物免疫系统中抗原对匹配抗体具有激励作用和相似抗体之间的抑制作用。依粒子的适应度值和浓度对粒子进行选择。抗体与抗原的亲和度通过粒子适应度值来表示,适应值越大激励作用越大,由激励作用选择的概率为
(9)
抗体对相似抗体的抑制作用通过粒子浓度来表示,粒子浓度越大抑制作用越强。依粒子浓度选择的概率表示为
(10)
粒子被选择的概率为
Pi=μPi1+(1-μ)Pi2
(11)
μ∈[0,1]为权重系数,依概率Pi对N+Nd个粒子按照轮盘赌的方式选择N个粒子。
2.3 基于改进AI-PSO算法的内模解耦控制
将上述算法应用在其广义对象的模型建立中,由内模解耦的关键在于设计系统广义对象的模型,而对于多输入多输出系统H(s)=det[GM(s)]·KD(s)往往出现高阶对象的加减运算,那么针对广义对象求逆的内模控制器和解耦补偿器在实际过程中稳定性是非常差的,因此使用改进的AI-PSO算法进行模型降阶并验证降阶模型的匹配度。
根据上文我们得到研究对象的传递函数(式(1)),计算该模型传递函数det[GM(s)]行列式和伴随矩阵adj[GM(s)]分别为
(12)
(13)
根据上文设计要求,设计对角矩阵KD(s)为
(14)
由此得到:K′(s)=adjGM(s)KD(s);广义对象为H(s)=det[GM(s)]·KD(s)。

具体步骤如下:
(1)初始化粒子群:确定搜索域并随机生成N=100个粒子,其位置矢量X=[k,a1,a2,L],并确定参数取值范围;初始化迭代次数K=80、加速权重c1=c2=0.5;优秀粒子数m=10、死亡因子β=0.1,等参数;计算初始粒子适应度值fi;
(2)更新个体历史最优、选择全局历史最优的前m个粒子组成的优秀粒子库;全局历史适应度最佳的粒子成为“免疫疫苗”;
(3)根据式(3)、式(6)更新粒子的位置;
(4)计算新一代粒子适应度值,模拟生物细胞死亡的过程,根据式(7)、式(8)淘汰掉适应度值低的M个粒子;
(5)在搜索域随机生成M+Nd个粒子并获得其适应度值,设置Nd=10;模拟抗原对抗体的激励作用和相似抗体的抑制作用,依概率公式(式(11))重新选择N个新粒子;
(6)判断进化代数是否达到最大迭代次数或者全局最优解满足性能指标要求,继续步骤(7),否则转步骤(2);
(7)将步骤(6)中全局最优粒子的位置矢量解码成降阶模型参数。
经过上述改进的AI-PSO算法寻优后得到模型降阶后的近似模型det[GM(s)]′表达式为
(15)
选用Simulink作为仿真平台设置对比实验,通过单位阶跃响应验证近似模型与原模型的匹配程度,并与文献[9]次最优算法近似模型以及文献[10]的遗传算法近似模型对比。结果表明本文方法的降阶模型匹配度进一步提高,完全可以代替原始模型。降阶后的广义模型为(式(16))
(16)
因此针对广义对象设计的内模控制器GIMC(s)为(式(17))
(17)
3 仿真分析与实验验证
根据上述AI-PSO复合算法优化后的降阶模型及针对此设计而成的内模控制器搭建仿真结构图,并将上文计算结果输入到仿真结构图中。按照夏季工况为例,将送风温度设定在15 ℃,在1000 s时调整为12 ℃;室内温度设定为25 ℃,在1500 s调整为20 ℃;静压设定为250 pa。将仿真结果与文献[11]中的PID前馈补偿解耦方法进行比较。在模型匹配情况下,送风温度控制回路仿真结果如图1所示,送风温度控制回路动态性能见表3。
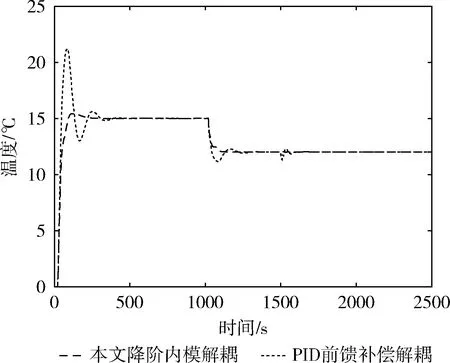
图1 匹配时送风温度控制回路仿真结果

表3 送风温度控制回路动态性能比较
在1500 s房间温度改变时,基于改进AI-PSO算法降阶的内模解耦控制的送风温度响应仅出现了轻微摄动,其解耦效果优于PID前馈补偿解耦。
在模型匹配情况下,室内温度控制回路仿真结果如图2所示,室内温度控制回路动态性能见表4。

图2 模型匹配时室内温度控制回路仿真结果

表4 室内温度控制回路动态性能比较
在1000 s送风温度回路发生改变时,基于PID前馈补偿解耦控制的室内温度控制回路出现了更加明显的波动,基于改进AI-PSO算法的降阶内模控制的解耦效果优于PID前馈补偿解耦。
在模型匹配情况下,静压控制控制回路仿真结果如图3所示,静压控制控制回路动态性能见表5。

图3 模型匹配时静压控制回路仿真结果

表5 管道静压控制回路动态性能比较
由机理分析可得,静压回路会受到风阀开度的影响,因此在1500 s室内温度设定值改变时,本文基于改进AI-PSO算法降阶的内模解耦控制策略使得静压响应波动较小,解耦效果优于PID前馈补偿解耦。
综上所述,在模型匹配的情况下,本文基于改进AI-PSO算法降阶的内模解耦控制的上升时间长于PID前馈解耦控制,但是降阶内模解耦控制的调节时间短,超调量小,具有更好的动态性能。在耦合回路设定值变化时,控制回路波动小,解耦效果更佳。
4 结束语
本文通过采用改进的AI-PSO算法来进行降阶模型的参数估计,使得控制器可实现。为提高算法寻优能力,使得降阶模型能代替原始模型。对常规粒子群算法中的惯性权重ω提出了使其呈Sigmoid形式自适应下降的策略来提升其寻优效果,同时利用多粒子学习策略增强算法的学习能力从而防止算法易陷入局部最优解的问题,并进一步引入人工免疫思想来拓展其寻优过程中粒子的多样程度,从而实现精准降阶。将时域和频域指标引入目标函数中,进一步提高了模型的近似程度,经过仿真验证算法降阶模型的匹配度更高。并将基于改进AI-PSO算法的内模解耦控制运用于VAV空调系统,通过仿真分析的方式与PID前馈补偿解耦进行对比,并通过实验验证,说明了基于改进AI-PSO算法的内模解耦控制具有良好的动态性能和解耦效果。
