中央空调管道清洁机器人机构设计与结构分析
2020-11-02朱金金
朱金金
(南通理工学院,江苏 南通 226000)
1 中央空调管道清洁机器人设计的需求
1.1 具有灵活的结构特点
事实上,在不同的行业领域中所采用的中央空调管道系统型号并不相同,且空调内的管道系统结构也不相同。因此,所设计出的管道清洁机器人要具有较为灵活的结构特点,满足各种上下左右的移动要求。
1.2 具有较高的清洗清扫功能
中央空调管道具有大、数量多等特点,因此在管道内所滞留存在的不仅仅是体积质量较大的灰尘,还可能出现动物尸体等。因此,管道清洗机器人要具有强大的清洗清扫能力,能够满足各种清洗标准,甚至在绿色生活理念下,管道清洁机器人还需要拥有一些附加的功能。
2 中央空调管道清洁机器人机构设计与结构分析
2.1 中央空调管道清洁机器人系统分析
中央空调管道清洁机器人的机构性能设计归根结底是为了清洁管道而服务的,因此在设计中央空调管道清洁机器人之前,需要展开对空调管道装置系统的分析。不同类型大小的中央空调管道系统组成是不同的,因此所采用的清洗方案也是不同的。当前要想设计出一款具有普适性的中央空调管道清洁机器人,需要展开对管道系统结构的分析。基于对管道系统装置的分析,本文所分析的管道清洁机器人其工作的整体情况如下所示:①清洁机器人要进入到空调管道中进行管道内部环境的检查,因此,需要配备行走机构,满足空调管道上下左右前后的行走,在系统中还需要配备视频传感器,将管道内部环境卫生情况上报控制系统,制定清洗方案。②展开对管道的清扫。清扫过程中不可避免地导致灰尘四处散落,因此需要利用气囊将空调风口堵住,确保室内环境质量,之后驱动清洗机器人的清扫模块,完成对风管内壁的清洗,利用集层净化器吸收风管内的病菌等。最后,再利用传感器展开风管内壁清洗效果的监督判断。③恢复风口和工作区域。可以说采取管道清洗机器人具有巨大的优势和特点,如:能够实现控制的可视化,制定好清扫的档案资料,便于展开对中央空调系统的质量控制管理。
2.2 中央空调管道清洁机器人的各个机构设计分析
2.2.1 控制系统设计分析
控制系统是确保清洗机器人做好行走、清扫工作的重要环节。基于电气自动化技术的发展,空调管道系统的清洗机器人控制系统主要由视觉观测模块和清洗装置模块2个部分组成。其中,清洗装置系统同行走系统结合在一起,需要完成驱动、升降、转向以及清洗作业,而视觉观测系统则需要将空调管道内部的图像信息、图片拍摄传输到电脑系统中,由工作人员根据观测到的图像信息对清洗装置展开控制。在控制系统中的电机控制驱动模块主要是由步进电机驱动和直流电机驱动2个子系统组成,采用分组控制的方式,分别控制速度和运转方向,如此很大程度地提升了清洗机器人的行走机构和清扫机构的协调运作效率。
2.2.2 行走机构设计分析
行走机构设计需要满足各种特殊的空调管道的清洗需求。如:对于竖直管道的清洗,对于管道内有障碍物情况下的行走。在本设计中主要采用中心兑成的腿足型行走机构,具体如图1所示。该行走机构主要由电机座、滑轨、电磁铁脚等组成。工作原理是由电机驱动轮组带动曲柄连杆机构推动滑块在滑轨上实现往复运动,同时利用磁铁脚的吸附作用,当齿轮齿条传动时,则磁铁被推出,吸附在管道壁上,当需要移动时,就给电磁铁通电,取消吸附力。根据实际的清洗需求可知,该清洗机器人的行走机构需要满足爬坡、转向、升降以及越障等功能作用,以下对不同功能参数展开设计分析。爬坡,最大坡度为60°;转向,最大转弯角度为90°,且转弯半径可以为60mm;升降,最大高度可以达到300mm,最小高度为200mm,且管道截面尺寸高度随机处理;越障,最大高度尺寸为90mm。
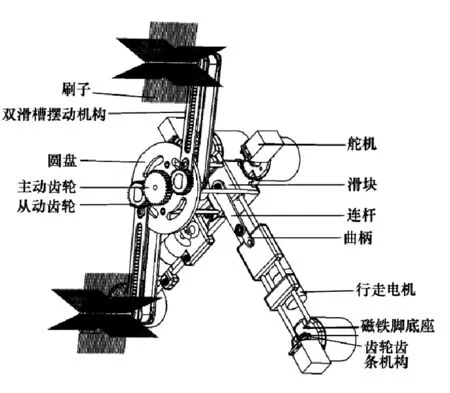
图1 清洗机器人的行走整体结构
驱动机构的设计分析。驱动机构为清洁机器人的行走提供动力,其是推动其前进的重要动力,同时驱动机构还具有灵活性,能够随着管道内部装置结构形状而作出改变。常见的驱动方式为履带式、螺轮式、脚足式等,本文采用的正是脚足式驱动机构,该方式具有适应能力强,越障能力强,对粗糙管道适应性较强,且具有较高的承载能力。
导向机构设计。清洗机器人的行走模块中必须具有导向功能,只有如此,才能够在各种矩形管道中,竖直管道中进行管道的整体清洁。常见的导向机构有差速式导向,由2个独立的驱动电机控制,本设计正是采用这种驱动导向机构,其设计方案图2所示。
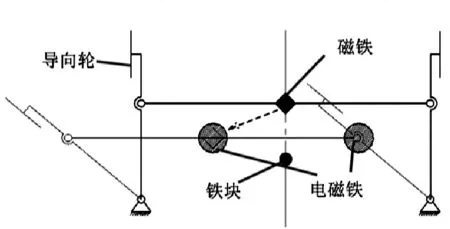
图2 清洗机器人的电磁导向机构设计原理
升降机构设计分析。常见的清洗机器人升降机构可以分为连杆结构和伸缩杆结构,本次设计所采用的连杆结构可以实现竖向方向和水平方向的转变,是一种自适应力极强的机构,且整体机构大小符合管道内的最小尺寸需求。在升降机构设计中,实现借助solidworks软件建立起连杆结构的模型,而后进行模型的仿真实验。
2.2.3 清洗机构设计分析
清洗机构模块是整个清洁机器人的重要组成部分,其决定着该机器人的工作效率,清洗有效性以及市场应用率和推广价值。通过对行走机构的设计分析之后,已经初步解决清洗机器人在空调管道内部的工作路径、工作方向,但是清洗方式则又需要对清洗下的杂质进行合理地回收,对各种顽固污渍进行全面清洗。因此,清洗机构需要具有清洗装置和回收装置。
清洗机构设计。清洗机构需要拥有清洗刷头、刷柄以及吸尘管。清洗结构的驱动机构主要原理是摆动,通过对吸尘管和刷头角度的控制,在一定时间内改变相对位置,完成对管道内部的全面清洗。因此,可以采用蛇骨结构,利用两端固定节和蛇骨骨节,根据所需要的长度规格进行相邻骨节的铰接,如此只需拽动一侧的金属线,就可以实现角度变化弯曲。具体设计方案如图3所示。
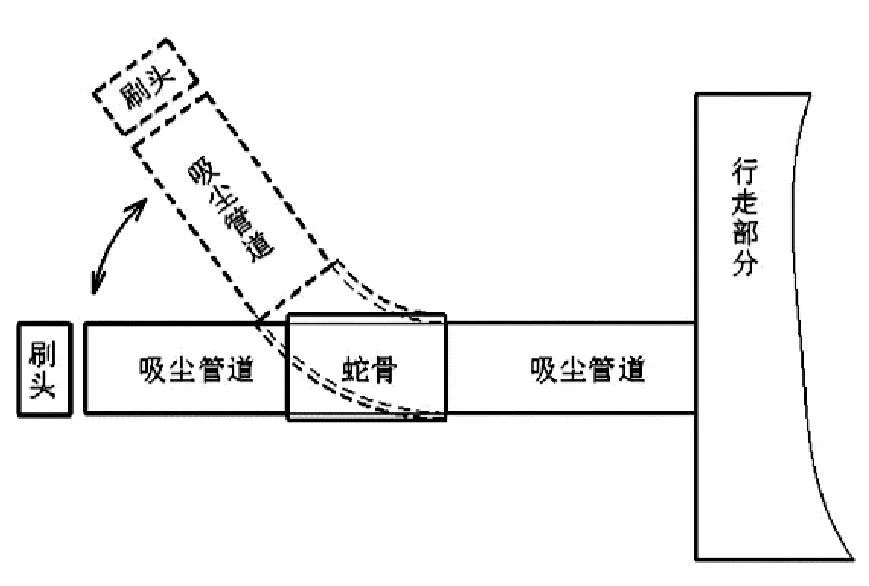
图3 清洗机构的整体方案设计
回收机构设计。将管道内的杂质回收带走是清洗机器人重要的工作内容,因此,需要设计回收机构,本清洗机器人主要是通过吸尘力效应来实现对灰尘等的回收。在本次设计中,通过建立模型的方式,对于所采用的吸尘管道的吸尘力变化参数的计算,基于该计算结果完成对吸尘口形状设计。
3 结语
综上所述,上述基于中央空调管道清洁的实际需求,完成对其机构和结构模块设计应用,所设计制作而成的清洁机器人具有较高的工作效率,在未来的研究探索中,仍旧需要不断地导入新的设计理念、设计思路进行管道清洁机器人的机构设计和结构的优化升级,为现代社会提供更加高质量、精细化的人工智能服务。