Impedance control of multi-arm space robot for the capture of non-cooperative targets
2020-11-01GEDongmingSUNGuanghuiZOUYuanjieandSHIJixin
GE Dongming,SUN Guanghui,ZOU Yuanjie,and SHI Jixin
1.Beijing Institute of Spacecraft System Engineering,China Academy of Space Technology,Beijing 100094,China;2.Research Institute of Intelligent Control and Systems,Harbin Institute of Technology,Harbin 150001,China
Abstract:Robotic systems are expected to play an increasingly important role in future space activities.The robotic on-orbital service,whose key is the capturing technology,becomes a research hot spot in recent years.This paper studies the dynamics modeling and impedance control of a multi-arm free-flyin space robotic system capturing a non-cooperative target.Firstly,a control-oriented dynamics model is essential in control algorithm design and code realization.Unlike a numerical algorithm,an analytical approach is suggested.Using a general and a quasi-coordinate Lagrangian formulation,the kinematics and dynamics equations are derived.Then,an impedance control algorithm is developed which allows coordinated control of the multiple manipulators to capture a target.Through enforcing a reference impedance,end-effectors behave like a mass-damper-spring system fied in inertial space in reaction to any contact force between the capture hands and the target.Meanwhile,the position and the attitude of the base are maintained stably by using gas jet thrusters to work against the manipulators’reaction.Finally,a simulation by using a space robot with two manipulators and a free-floatin non-cooperative target is illustrated to verify the effectiveness of the proposed method.
Keywords:multi-arm space robot,impedance control,noncooperative target,capture.
1.Introduction
With the merit of enhanced efficiency and reduced risk for astronauts,robotic on-orbit servicing will play an increasingly important role in future space activities, such as satellite repairing,spacecraft docking,refueling and orbital debris removal[1,2].One of the most important phases of such satellite servicing operations by a space robot is the contact phase.During the contact between the end-effector and the grasping point,there is a risk that the target and the robot can be pushed away from each other by the contact force.A variety of capture schemes have been proposed,such as space net robot[3],tethered space robot[4–6]or rigid space robot with the manipulator[7].Because rigid capture has the advantage of stability,maneuverability and operability,it is still the main solution in engineering.Onorbit demonstrations for cooperative target capture via the rigid manipulator have been carried out,such as Engineering Test Satellite-VII(ETS-VII)[8]and Orbital Express[9].In fact,a malfunctional satellite or an orbital object usually does not have special docking mechanism,and may have a tumbling or spinning motion.Robotic servicing of such a non-cooperative target is still an open research area facing many technical challenges.Comparing with a single-arm space robot,a multi-arm robotic system has much more dexterity,and can provide better contact stability to complete capture tasks.Dynamics and motion control of the multi-arm robotic system have been widely studied by various researchers[10–14].However, coordination and control of the spacecraft and its multiple manipulators during the capture stage or manipulation of objects has not attracted adequate attention.
Regarding the base spacecraft, there are two types of operation.The first type corresponds to the free- flying case where the base is actively controlled.Hence,the entire servicing system is capable of being transferred and orientated arbitrarily in space.The second type is the freefloating case where the control of the base is inactive.Thus,the base is completely free to translate and rotate in reaction to the manipulator motion.The motions of space manipulators will generate reaction forces and moments on the spacecraft platform due to the dynamic coupling between manipulators and the base,which would complicate the kinematics and dynamics analysis for the system.A precise and efficient dynamics model is important for the model based dynamic controller to achieve a better performance while executing space missions.Using a tree topology to describe open chains of multi-body systems,the multi-body systems can be described by Newton-Euler,Lagrangian formulations and Kanes method[15–19].These approaches are mainly used to complete multibody dynamics analysis for space mechanisms.The usual recursive dynamics formulations are not very useful for design and development of model-based control algorithms.The early modeling approaches that can be applied to the dynamics modeling of space robotic systems are mainly concerned on the free- floating mode operation.The kinematics and dynamics of a free- floating space manipulator system have been described by using the virtual manipulator approach[20].The generalized Jacobian matrix has been presented and employed to present solution algorithms to the inverse kinematics of a space manipulator mounted on a free- floating spacecraft[21].However,the workspace of free- floating systems is restricted by the inability to have the system center of mass translated.Especially when capturing a moving target,the system stability is problematic by the existence of workspace dynamic singularities[22].Moosavian and Papadopoulos[23]developed the explicit dynamics model of multi-manipulator free- flying space robots.Their analysis showed that the explicit dynamics model was well-suited to model-based control algorithms with reduced computational burden.Inspired by this idea,this paper will also study an explicit dynamics modeling method for multiple-arm systems.
The main purpose of a non-cooperative target capture operation is to catch the moving and tumbling target without undermining the attitude of the base spacecraft.Also,the interaction with environment should be considered during the impact phase.As for contact control methods,active compliance control has become a big research topic in robotics.Hybrid position/force control strategy,which was proposed by Raibert and Craig,has been a considerable control method[24,25].However,control mode switching is requiredat many points during most space tasks.In[26],Hogan investigated the impedance based control scheme to handle the physical contact between the end-effector and the target.In the area of impedance control,many efforts have been made to deal with the case of a free- flying space robot.Moosavian et al.presented a multiple impedance control to manipulate space objects by multi-arm spaceflying robots[27,28].On the contrary,Swain and Morris studied another control structure with force compensation for the disturbances on the base spacecraft[29].However,these methods need perfect control of the base while the base position cannot be controlled accurately by gas jet thrusters.Also,mass and geometric properties of the manipulated object are assumed to be known,which is an unreasonable assumption for non-cooperative targets with unknown physical properties.For single-arm space robots,Nakanishi and Yoshida presented an impedance control method without precise base control[30].Therefore,it may be a more appropriate approach for impedance control of multiple-arm systems,which is studied in this paper.
This paper studies the dynamics modeling and impedance control of a multi-arm free- flying robot during capture operations.Firstly,using a general and a quasicoordinate Lagrangian formulation,an explicit modeling approach is developed to obtain the kinematics and dynamics equations.Derivation of the equations of motion results in explicit formulations of the systems mass matrix,nonlinear velocity terms and Jacobian matrix.Unlike recursive dynamics formulations,the obtained model is very useful for dynamics analysis,design studies,and development of model-based algorithms.Then,the impedance control method for free- flying space robots proposed in[30]is extended to the case of multi-arm free- flying robot.Based on the derived kinematics and dynamics equations,the impedance control method is developed for distinct cooperating manipulators to capture a target.The impedance control enforces a reference impedance on the manipulator end-tips such that the end-effectors behave like a massdamper-spring system fixed in inertial space in reaction to any contact force between the capture hands and the target.Meanwhile,the position and the attitude of the base are maintained stably by using gas jet thrusters to work against the manipulators’reaction.Finally,a capture simulation is conducted with the two-arm space robot carrying a load.Numerical simulation results indicate that the presented impedance control of the multi-arm space robot is effective even in the case of capturing a target with fast or complicated motion.
2.Explicit modeling of free- flying space robot with multiple arms
This section develops the kinematics and dynamics equations of a rigid multiple arm free- flying space robotic system,as shown in Fig.1.For the sake of simplicity,the effect of elastic deformation and gravity are neglected.B0in Fig.1 represents the base of the space robot,which is connected bynmanipulators.Each manipulator hasnactive joints andNmlinks.Bidenotes theith link of themth manipulator,andJiis the joint which connectsBi−1andBi.

Fig.1 Space free- flying robot with multiple arms
The joints are revolute and have only one degree of freedom(DOF).The equations pertaining to the kinematics and dynamics are represented with respect to the local coordinate systemCiattached to the link.
The kinetic energyTifor the givenith link of themth manipulator is written as

whereandare the 3×3 inertia tensor and the first moment of mass about its body fixed frameCi,is the mass and 1 is the 3×3 identity matrix,andare the linear velocity and the angular velocity with respect to the inertial frame,respectively.Wheni=0,(1)will be reduced to the kinetic energyT0for the space robot baseB0with the form

For simplicity,the 6×6 extended mass matrices are defined as

The velocity constraint between theith linkBiand the(i−1)th linkBi−1(m=1,...,n;i=1,...,Nm)is given by


and


where diag(0,0,1)denotes the diagonal matrix.
For thekth link of themth manipulator,the kinematic equations of motion can be assembled as

Now,all of the intermediate terms can be put together and written in a more compact form as

Thus,(9)can be rewritten as

By settingk=Nm,the end-effector velocity of themth manipulator is described as


From(13),the kinetic energyT(m)for themth manipulator is obtained as




According to the dimensions of[v0,ω0]Tandq(m),partition the matrixM(m)(q(m))as

Therefore,the total kinetic energy for the space robot system is given by


whereq=[q(1),q(2),...,q(n)]T,and

Note here that the matrixM(q)is the well-known generalized inertia matrix(GIM)[21].Similarly,according to the dimensions of[v0,ω0]Tandq,partition the matrixM(q)as

Unlike the recursive Newton-Euler dynamics formulations,Lagrange’s equations of the second kind applied to the total kinetic energy of the system result in a minimal set of ordinary differential equations with independent variables.To develop an explicit dynamics model of such complex systems,the Lagrangian formulation is applied.Note that the angular velocityω0of the base is not generalized coordinate, because the attitude angle of the base cannot be obtained directly by integrating through the angular velocity. Therefore, the classical Lagrangian formulation based on generalized coordinate becomes quite intricate to derive for the rotational motion of the space robot base directly.To overcome this limitation,the quasi-Lagrangian(25)is preferred to describe the base motion.

whereτis the generalized force in the general sense,and here is the joint torques of the manipulators.F0andT0are the external force and the moment applied on the base,respectively.
Using the expression for the kinetic energy given by(21),and by applying Lagrangian(24)and quasi-Lagrangian(25)to the DOFs of the manipulators and the base respectively,the dynamics model can be obtained as


3.Impedance control of multi-arm space robot
This section will extend the impedance control method to the case of multi-arm space robot for the target capture.The control objectives include the compliance of the tip of the manipulator in the inertial space,and the dynamic stability of position and attitude of the base.As shown in Fig.2,all of the manipulator end-effectors are controlled to behave like a mass-damper-spring system fixed in inertial space in reaction to any contact force between the capture hands and the target.Meanwhile,the position and the attitude of the base are maintained stably by using gas jet thrusters to work against the manipulators’reaction.

Fig.2 Impedance control for multi-arm space robot
Availability of the system kinematics and dynamics is always helpful in the design of the impedance control system.To distinguish between the motion of the base and the manipulators,the complete variableηis broken down intoxbandq.xbis the position and attitude of the base with ˙xb=[v0,ω0]T.Adding the external force and moment applied on the manipulators and according to the partition,(29)can be further decomposed as follows:

whereHbis the inertia matrix of the base,Hmis the inertia matrix of the manipulators,andHbmis the coupling inertia matrix between the base and the manipulators.Cbis the nonlinear term of the base,andCmis the nonlinear term of the manipulators.Fbis the external force and moment applied on the base withFb=[F0,T0]T.Fhis the external force and moment applied on the end tips of the manipulators within whichis the external force and moment on the end tip of themth manipulator.Jbis the Jacobian matrix for the base withJmis the Jacobian matrices for the manipulators with
By canceling out the base accelerationin(30),the equations of motion can be reduced to the joint space formulation:

whereis the generalized Jacobian matrix for the base withis the generalized Jacobian matrix for the manipulators with
The momentumP0∈R3and angular momentumL0∈R3of the whole system with respect to the base body fixed frame are

The relationship of the velocity of the base,the angular velocity of the joints,and the end-effector velocity of the manipulators∈R6nis

Substituting(32)into(33)leads to


For capturing a non-cooperative target, the motion of the target after contact depends on the apparent momentum of the contact point of the manipulator end-effectors.Since the target to be captured is noncooperative,its mass and geometric properties are unknown in advance.One of the most reasonable methods to control the apparent inertia is impedance control of the manipulators.It should be noted that an important premise of the above theory is that the impedance characteristics of the manipulators are realized under the inertial coordinate.However,in case of a freeflying space robot,such characteristics cannot be obtained by the conventional impedance control method[26],because the motion of the base interferes with the impedance characteristics defined by the control.In this paper,the control objective is the dynamic stability of the tips of the manipulators in inertial space.The tips of the manipulator can be the mounting positions of the capture hands,because the force measurement here is more convenient and stable.As is shown in Fig.2,the desired dynamic characteristics are assigned in a compact form as follows:

By differentiating(34)with respect to time,it turns out that

According to(31),(36)and(37),the impedance control for the multi-arm space robot is derived as follows:

When the base is uncontrolled as the free- floating case,(38)decreases to the control law for the free-floating mode.By applying the control input to actuate the joints,the tips of the manipulators can behave like a mass-damper-spring system fixed in inertial space.
In(38),Fbis the force and moment control signal from the base thrusters,which is used as a feedforward term to compensate the disturbance from the base control.The pseudorate modulator is used as the pulse signal generator,shown in Fig.3.The modulator produces a pulse command sequence to the thruster valves by adjusting the pulse width and pulse frequency.In the linear range,the average torque produced equals the demanded torque input.

Fig.3 Derived-rate modulator
Under slowly varying signals,the dynamic characteristics of the derived-rate modulator can be approximated as 1+Tms.A proportion integration differentiation(PID)controller is designed as follows:

whereuis the control command input to the modulator.Δxbdenotes the deviations of the base position in inertial space.According to the pole assignment method,the control gainskp∈R6×6,ki∈R6×6,kd∈R6×6can be computed for certain bandwidth requirement.
The compliance capture and coordinated control of the base and its manipulator are shown in Fig.4.Traditional methods usually assume the manipulators’reaction as a disturbance force on the base,and use the feedforward momentum or torque to compensate for the manipulators’reaction.The presented method does not clearly distinguish the interface between the base and the manipulators.The space robot is considered as a whole dynamic system.The derived compliance control uses dynamics decoupling and kinematics matching to realize the desired dynamic characteristics precisely.The reaction jet based control of the base works against the manipulators’reaction,while compensating the extra momentum imposed by the impact forces on the space robot system.
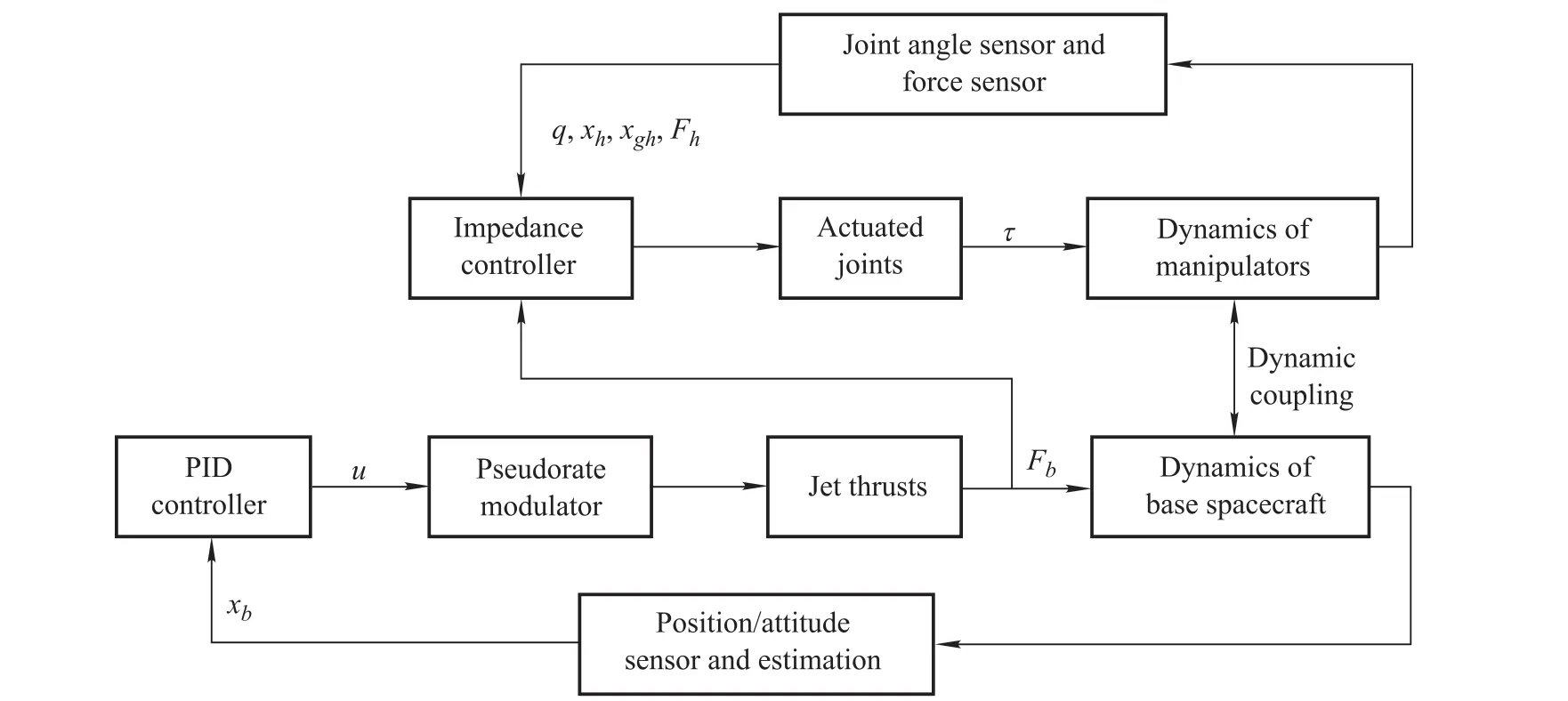
Fig.4 Compliance capture and coordinated control system
4.Applications to a tumbling target capture mission
To verify the effectiveness of the proposed method of the impedance control of the multi-arm robot,this section will consider a simulation based on a space robot with two manipulators and a free- floating space target.The system dynamics model of the two-arm space robot is a critical element in the control system simulation code.The computing code for dynamics(30)and Jacobian matrices in(37)are obtained by the explicit modeling method presented in Section 2 to realize the control code simulation.The simulation dynamics model of the space robot capture system is set up by Adams including space robot dynamics,target dynamics,and contact dynamics between the capture hands and the target.The control model of the space robot is constructed in Matlab/Simulink.The two models are integrated together using Adams&Matlab cosimulation.The space robot system consists of a 400 kg satellite base,two 2 m and 6 DOF manipulators.The mass of the target is 100 kg.The same impedance characteristics are selected for the two end-effectors with the values of inertia,damping and stiffness matrices chosen asMi=I12×12,Di=10I12×12,Ki=100I12×12.The magnitudes of the force and moment components ofFbin(38)are assumed to be 10 N and 10 N·m.
The responses of the end tips of the two manipulators to static load input are examined.Two 10 N static forces are applied in the−xdirection for the two end-effectors.The robot is set to be the free- floating mode with the base uncontrolled.The deviations of the end-effectors of the manipulators are shown in Fig.5(a).As shown in Fig.5(a)and Fig.5(b),the responses of the positions of the endeffectors coincide with the analytically obtained responses with(36)precisely.In spite of the base motion by the input forces and reaction forces of the manipulation, the manipulators make adjustment to maintain the desired impedance characteristics with respect to the inertial space(see Fig.5(c)and Fig.5(d)).



Fig.5 Simulation results of static load response
However,the cost is that the manipulator configuration needs to make large regulation to maintain the stability of the position and attitude of the end-effectors in inertial space.Meanwhile,the base is moving backward in the−xdirection due to conversation of momentum,and the attitude is disturbed to increase larger and larger,as shown in Fig.5(e)and Fig.5(f).Large changes of manipulator configuration may lead to dynamic singularity and system instability,as is pointed out in[30].Therefore,the jet based control of the position and attitude of the base is very necessary to maintain the stability of the capture configuration during the contact phase.
In the capture simulation,it is assumed that prior to the contact,the target is tumbling around the capture axis at a constant angular velocity of 5◦/s.During capture,the end-effectors of the two manipulators follow the grasping points in the spin axis with the same velocity.The robot is set to be the free- flying mode with the base controlled.Based on the above setup,the obtained simulation results are presented in Fig.6.



Fig.6 Simulation results of capture operation
As shown in Fig.6(a)and Fig.6(b),the tips of the two manipulators are maintained dynamic stable in inertial space during the whole capture operation.The position and attitude perturbations of the base are effectively suppressed by the jet control to compensate for the manipulators’reaction(see Fig.6(c)and Fig.6(d)).As a result,the manipulator configuration just needs to make small adjustment to maintain the stability of the tips in inertial space(see Fig.6(e)and Fig.6(f)).The control torques of the manipulators are shown in Fig.6(g)and Fig.6(h).The presented impedance control of the multi-arm space robot is effective even in the case of capturing a target with fast or complicated motion.
5.Conclusions
This paper introduces a general model of multi-arm space robot for the capture of non-cooperative targets by using a general and a quasi-coordinate Lagrangian formulation.Unlike the classical recursive dynamics formulations,the proposed model is very convenient for dynamics analysis and model-based control algorithms design.Based on the proposed model,the impedance control strategy is generalized to get a good performance of the multi-arm collaborative capture of non-cooperative targets.By introducing a reference impendence on manipulator end-tips such that end-effectors behave like a mass-damper-spring system in reaction to any contact force between the capture hands and the non-corporative target,the proposed impendence method has a good control performance.Numerical simulation results also indicate that the method is very effective even in the case of capturing a target with fast or complicated motion.
杂志排行

Journal of Systems Engineering and Electronics的其它文章
- Multi-target tracking algorithm based on PHD filte against multi-range-false-target jamming
- Design,analysis and optimization of random access inter-satellite ranging system
- Parity recognition of blade number and manoeuvre intention classificatio algorithm of rotor target based on micro-Doppler features using CNN
- Uplink NOMA signal transmission with convolutional neural networks approach
- A transceiver frequency conversion module based on 3D micropackaging technology
- Renormalization:single-photon processes of two-level system in free space