基于贝叶斯网络的水下目标识别∗
2020-10-30
(武汉市江夏区藏龙北路1号 武汉 430205)
1 引言
水下目标识别是水面舰艇编队遂行水下作战的关键技术,需要情报处理系统在获取到监视区域内探测的目标信息后,根据声纳等水下传感器探测信息对目标的类型、真假或属性等做出判断,进而对目标进行分类,以便能区分出潜艇、鱼雷、水雷等目标,进而辅助指挥员进行水下作战指挥决策,使之能根据准确的信息施行有效的应对[1]。因此,水下目标识别技术是各涉海军事强国发展的重点。随着水下目标隐身技术和水声对抗技术的发展,特别是安静型潜艇的出现,水下目标识别面临了极大的挑战,发展水下传感器网络多源信息协同识别技术是当前水下目标识别的主要方向,因此研究如何利用多源信息进行综合建模,形成准确的多证据目标识别推断结论是当前研究的热点。目前,国内外关于目标识别的方法很多,主要涉及空中、水下、水面等不同目标的识别,所用的方法主要包括多属性决策理论、模糊逻辑法、神经网络、支持向量机方法、深度学习等[2~11]。本文借鉴贝叶斯网络在不确定性信息处理方面的优势,结合水下传感器网络获取的目标多源异类信息进行目标识别,可得到较为准确的目标识别信息[12]。
2 贝叶斯网络基本理论
贝叶斯网络是一种利用概率分布来表达事物之间联系的数学网络模型,以网络图形的模式将构成事物关联的节点连接到一起,通过概率分布的形式从经验数据、样本中获取先验知识,并用于推理,可以很好地表达专家知识和、经验,很方便地进行事物推理。与规则库、决策树、人工神经网络等其它知识推理工具相比,贝叶斯网络具有图形化表征形式、局部及分布式学习机制、直观推理等特征,被广泛应用于因果推理、不确定性知识表达、模式识别和分类、聚类分析等多个方面,本文即利用贝叶斯在不确定性推理方面的优势,推广到多源异类信息的目标综合识别分析[12]。
如图1所示为一个典型的贝叶斯网络,其组成是由N个节点构成的贝叶斯网络图,图中每个节点表示一个随机变量,节点之间的连线称为有向边,可以用来描述节点之间的因果关系。在具体贝叶斯网络模型中,用条件概率表来表示不同节点之间的联系,一般来说条件概率描述的是父节点与子节点不同证据之间的联系,通过节点之间先验概率与证据之间的联合概率计算就可以进行多证据推断,即进行网络推理。
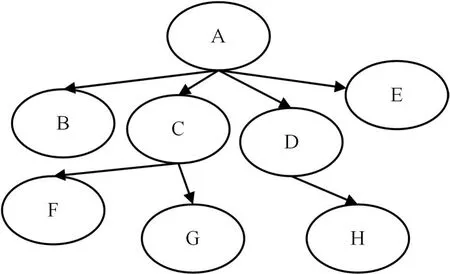
图1 典型的贝叶斯网络结构图
3 水下目标识别
3.1 水下目标识别问题
水下目标识别主要是对目标的类型、真假或属性等做出判断,进而对目标进行分类,以便能区分出潜艇、鱼雷、水雷等目标,是进行水下作战目标威胁估计和指挥决策的重要参考依据。水下目标识别是基于不同传感器得到的目标属性数据形成一个组合的目标身份说明。信息源可以是动态信息,也可以是静态信息,可包括位置、速度、加速度、回波强度、机动类型等,图2为水下目标身份识别结构图。假设有n个传感器用于水下目标观测。每个传感器的观测数据经过处理后形成观测说明,设H1,H2,…,Hm为所有可能出现的m个目标,Di表示第i个传感器对于某个目标身份的说明信息,则有下面的关系:

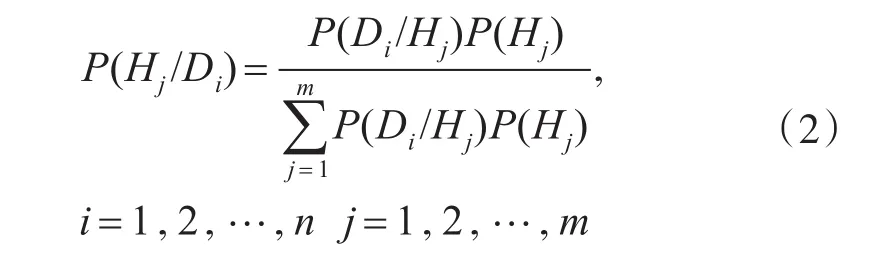
利用贝叶斯网络进行水下目标识别即利用式(2)进行推理计算,主要步骤如下:
1)对各传感器观测信息进行处理,形成目标身份说明D1,D2,…,Dn。
2)计算每个传感器对于目标身份说明的条件概率,即P(Hj/Di),i=1,2,…,n j=1,2,…,m。
3)计算目标身份的联合概率分布:

如果D1,D2,…,Dn为相互独立的观测说明,则

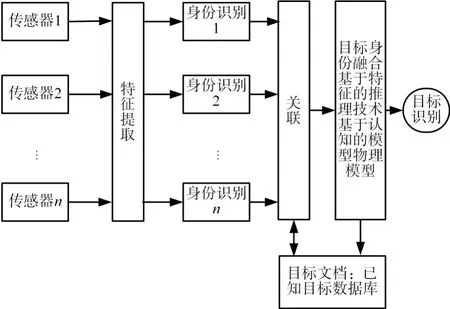
图2 目标身份识别结构图
3.2 目标识别贝叶斯网络模型
目标识别贝叶斯网络模型是将众多与目标身份相关联的观测信息利用贝叶斯网络进行表达,在贝叶斯网络图中将目标身份与众多的因素联系起来。本文研究的主要影响水下目标识别因素包括:目标距离、目标速度、回波强度、机动类型等。利用贝叶斯网络进行水下目标识别主要包括三个步骤。
1)确定节点及节点状态,本文主要考虑的节点包括5个,分别为目标类型、目标距离、目标速度、回波强度、机动类型;五个节点离散化的状态如下:
(1)目标类型A:1常规潜艇、2隐身潜艇、3鱼雷、4水雷
(2)目标速度B:1低速、2高速
(3)目标距离C:1近、2中、3远
(4)回波强度D:1强、2中、3弱
(5)机动类型E:1强机动、2弱机动
2)确定节点之间的关系,本文建立的5个节点之间的关系如图3所示,父节点为目标类型,子节点为目标距离、目标速度、回波强度、机动类型。

图3 水下目标识别贝叶斯网络结构
3)节点概率分配
本文设计的贝叶斯网络模型中的条件概率包括 P(B/A)、P(C/A)、P(D/A)和 P(E/A)。一般来说,通过对大量样本的统计分析,可以得到条件概率,这对于样本足够多时较为方便。当然,对于大多数训练样本数据不充足的情况,可由领域专家通过人工分析来得到条件概率。作为研究,本文可假定通过专家人工分析的手段来获取条件概率,假定专家指定的目标识别贝叶斯网络各节点的条件概率如表1、表2、表3、表4所示。
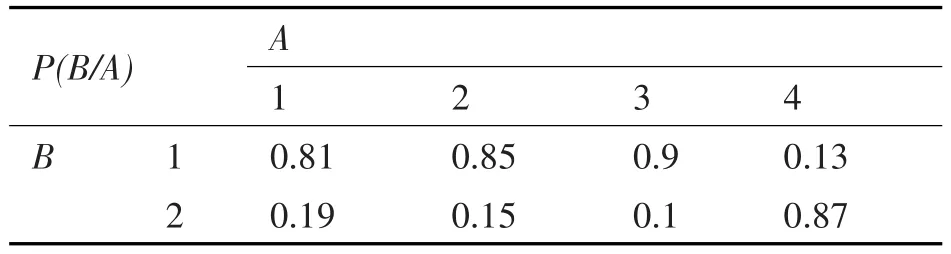
表1 目标身份识别的贝叶斯网络各节点的条件概率表

表2 目标身份识别的贝叶斯网络各节点的条件概率表
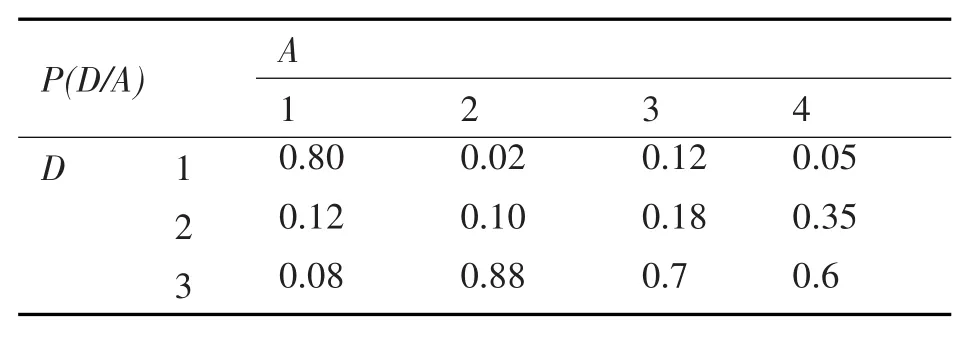
表3 目标身份识别的贝叶斯网络各节点的条件概率表
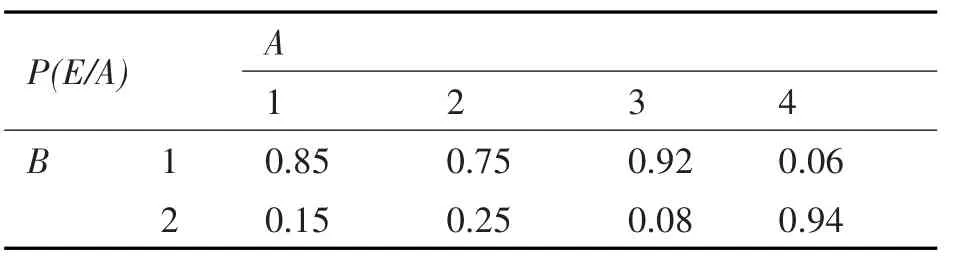
表4 目标身份识别的贝叶斯网络各节点的条件概率表
3.3 目标识别求解流程
如图4所示,用贝叶斯网络进行水下目标识别包括以下步骤:首先是对贝叶斯网络进行初始化,即指定先验概率和条件概率;其次是水下传感器网络进行水下目标观测,并对获取的信息进行处理,形成量化的状态特征信息;然后是进行推理,即当量化的状态特征信息发生变化时利用贝叶斯公式进行逐层的节点概率推理计算,从而得到所有节点后验概率分布,当推理计算遍布了整个网络时就完成了整个网络所有节点概率信息的更新,最后通过根节点概率分布信息的判断来得到问题的解,最终完成目标的身份识别。
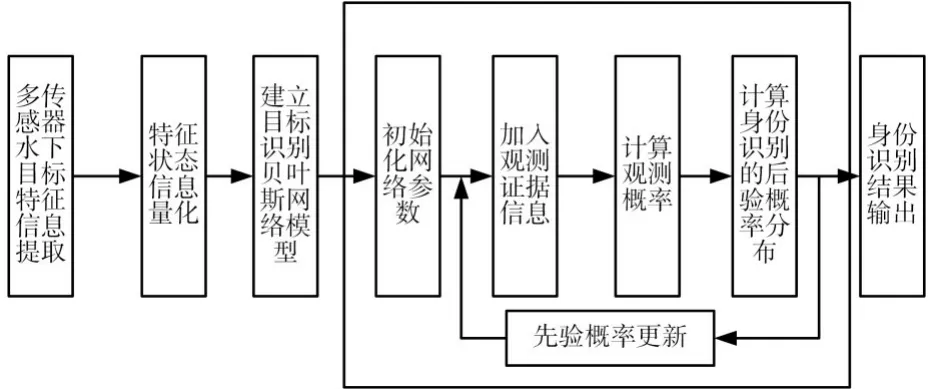
图4 贝叶斯网络水下目标识别推理过程
4 仿真分析
为了验证本文提出的贝叶斯网络目标识别模型及计算方法的可行性,我们设计了两个目标观测信息的仿真分析试验进行仿真验证。假设我水下传感器网络探测到2个水下目标,经过多源信息融合后,我方舰艇指控系统显示两个目标的信息分别为
目标1:低速运行,声呐回波显示强度大,即B=1,D=1。
目标2:高速运行,声呐回波强度低,机动类型强,即B=2,D=3,E=1。
表5给出了根据水下传感器网络处理后的观测证据信息对探测到的两个目标的识别推理结果,经过推理计算对于目标1,为常规潜艇、隐身潜艇、鱼雷、水雷的概率分别是 0.8313、0.0218、0.1386、0.0083,因此,该目标为常规潜艇的可能性大;经过推理计算对于目标2,为常规潜艇、隐身潜艇、鱼雷、水雷的概率分别是 0.0622、0.4768、0.3102、0.1508,因此目标2为隐身潜艇和鱼雷的可能性较大,根据结果为隐身潜艇的可能性更大,可进一步供指挥员决策。图5给出了试验中两个目标经过推理的后验概率分布图。从图5中可以看出贝叶斯网络能够很好地利用目标类型、目标距离、目标速度、回波强度、机动类型等不同的因素进行水下目标身份的甄别,能够将专家经验知识反映到模型中,能够较准确地反映目标的类型信息,可为指挥员水下作战指挥提供决策支撑,具有一定的合理性和科学性。
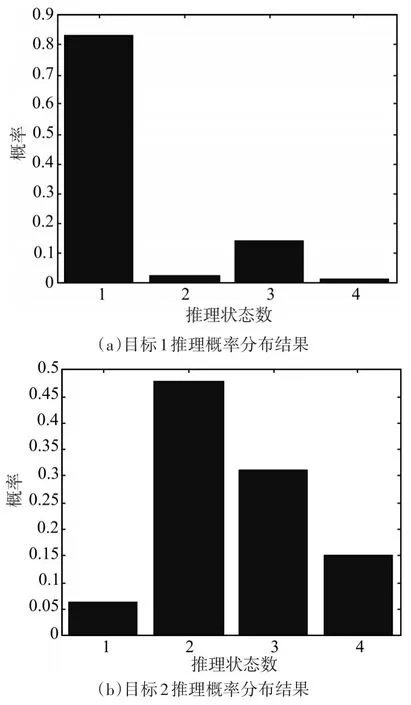
图5 目标识别推理后验概率分布图
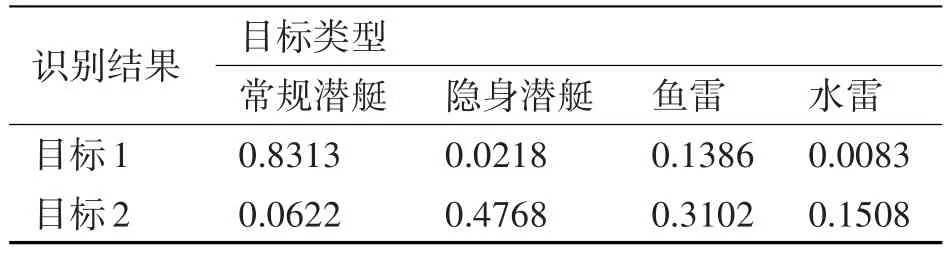
表5 两个水下目标识别推理身份概率分布表
5 结语
针对现有的侦查手段有限,收集到的战场多源信息不完备性和不确定性突出,使得传统的确定性理论已无法描述复杂的海战场水下环境,无法有效地进行水下目标识别的问题,文中引入了基于贝叶斯网络的不确定性知识表达方法,对贝叶斯网络在水下目标识别中的使用和实例仿真都进行了详细分析。本文的内容尚处于理论研究和仿真试验阶段,具体算法的工程应用还有待于后续的装备试验,本文的研究将为水面舰艇编队水下战辅助决策提供理论和技术支撑。
