航拍方式对实景建模影响的研究
2020-10-29谈里宾孙亮
谈里宾,孙亮
(中国建筑第二工程局有限公司)
1 背景知识
现阶段常用的航拍方式有环绕式拍摄、纯俯视拍摄、点全景拍摄、倾斜式拍摄。使用大疆精灵4 系列无人机,有效像素2000 万;对后期建模也使用相同的处理软件,整个研究过程建模软件使用Bentley 系列软件中的contextcapture模块[1]。
建模对象:静态物体
辅助信息:传感器属性、照片位置姿态参数、控制点等
计算过程:空三、重建阶段的参数设置
输出结果:带有真实纹理的三维格网模型(实景真三维模型)
2 实施过程
2.1 环绕式拍摄
建模区域为广场观光单体建筑,高度约25m,结构为异形结构,包括有5m 深的地下部分,整体的占地面积约为100 ㎡。
1)航拍无人机采取环绕拍摄方式
以某建筑物中心为原点,无人机以半径30m 的画圆方式拍摄,航拍照片注意航向上重叠度不小于80%,旁向重叠度不小于50%[2]。值得注意的是对物体的拍摄可以通过调整相机焦距以满足最佳的拍摄效果,但Smart3D 实景建模软件对变焦、广角、鱼眼照片较难计算,很难生成最终的实景模型,所以整个航拍过程必须保持相机焦距一致[3](见图1)。
2)拍摄效率
目前大疆精灵4 无人机单节电池续航能力约15min,航拍人员的无人机操作能力较好,能完成大多数航拍任务[4]。完整拍摄建筑物大约需要50 张~70 张照片.由于建筑物有部分地下结构,需要进行环绕拍摄外的局部补充拍摄,使整个建筑物被完整拍摄,最终整体消耗时间约30min(耗时包括人员移动时间、无人机电池更换时间等)。
3)模型制作效率
整个阶段电脑硬件全部使用的是Alienware17 R3 系列,保证后期渲染能力一致,进而实现建模能力的均衡。
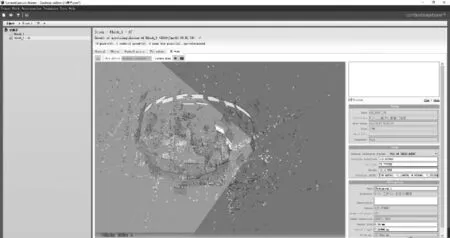
图1 航拍方式
实景建模制作过程中的关键点是空中三维测量,软件对导入的照片必须准确的获取每个影像组的属性以及影像挚爱信息,如果存在信息缺失,或者不够精确,软件会自动计算这些信息[5]。
在空三运算开始前,需要设立预算渲染区域,将无效或本次测试内容以外的区域删除,提升项目制作效率。在较大的场景中,还需要进行原点分割,根据项目本身所需区块大小以及渲染电脑性能进行区块划分,将渲染区域分割为多个区块,使用相应的坐标系来定义所有区块的坐标系,建模区域形成多个相互衔接的半透明立方体,最终生成模型为统一坐标系的整体[6]。
4)优缺点分析
优点:航拍效率高,模型生成效果好。
缺点:该种方式适合单体建筑,在大场景中应用困难,效果差。
2.2 纯俯视式拍摄
1)拍摄对象记录分析
对某公园平面进行纯俯视拍摄,公园特点如下,整个航拍区域标高变化小、基本无高大建筑、区域面积中等,约500 ㎡。
2)拍摄方式
航拍人员已选定飞行高度60m,无人机飞行路线呈现蛇形,镜头垂直向下间隔拍摄;拍摄硬件及人员均与“环绕拍摄方式”保持一致,航拍照片数量180 张~200 张,耗时约2h(耗时包括人员移动时间、无人机电池更换时间等)。
整个建模处理流程均与上面的流程一样,全部采用Smart3D 实景建模工具进行,这里不再赘述。点位数据分析和最终的渲染模型耗时6h。
3)优缺点分析
本种航拍方式存在问题,不能在实景建模中使用,由于没有其他角度照片对模型进行校正,最终生成模型往单一方向倾斜,不能满足使用要求。
2.3 点全景式拍摄
1)拍摄对象记录分析
拍摄方式地形为5km 道路地形,取路线的局部进行拍摄测试(路线长度约500m),地形特点,建筑构筑物少,90%区域为戈壁滩,地形起伏大,无人机换点拍摄耗时长。
2)拍摄方式
在路线上找关键点,确定拍摄点位间隔距离,在关键点位进行360°拍摄,保证对整个地面部分拍摄照片;无人机飞行路线与道路路线保持一致,整个航拍的硬件及人员与前面的保持一致,航拍照片130 张~150 张,耗时1h(耗时包括人员移动时间、无人机电池更换时间等)。
整个建模处理流程均与上面的流程一样,全部采用Smart3D 实景建模工具进行。最终在建模阶段的效率记录如下:点位数据分析和最终的渲染模型耗时2h。
3)优缺点分析
优点:航拍效率极高,生成模型效果优秀,能满足应用要求。
缺点:对模型漏洞修补采用二次航拍方式效率低。
2.4 倾斜摄影式拍摄
1)拍摄对象记录分析
拍摄方式地形为城市地形,存在较大的高差,且存在大量的构筑物,选取城市中的一个区域进行拍摄测试。
2)拍摄方式
拍摄方式使用倾斜摄影方式,拍摄区域选取适当的飞行高度,飞行路线为蛇形,在间隔的每一点都进行5 个方向上的拍摄,每张拍摄衔接度60%~80%,侧面的倾斜角度在15°左右。拍摄面积25000 ㎡,照片数量250 张,拍摄时间2h。
整个建模处理流程均与上面的流程一样, 全部采用Smart3D 实景建模工具进行,这里就不在赘述。最终在建模阶段的效率记录如下:点位数据分析和最终的渲染模型耗时4h(见图2)。
对各项对比参数设立分析数值,最高为5 分,最低0 分,通过数值分析各项影响程度,对单点撒式摄实景建模分析如表1:
3)优缺点分析
优点:拍摄方式简单,可以利用无人机路径设定后自动拍摄,对大场景拍摄效率高。
缺点:对无人机续航能力要求较高。
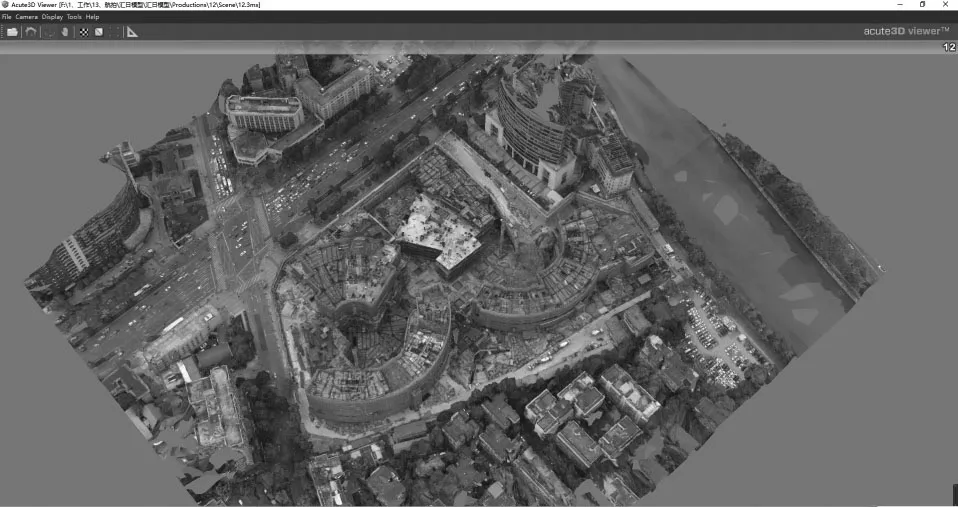
图2 建模效果

表1 单点撒式摄实景建模分析
3 结语
针对不同的建模情况选择不同的航拍方式可以最大限度的提高无人机航拍效率以及实景建模效率。
第一类:单体建筑或者小场景场地。采用全环绕拍摄效率极高,在1h 内能完成拍摄,一般照片张数在150 张左右,建模效率在2.5h 内。
第二类:只需要路线及周边情况,不需要其余区域的模型。采用点全景拍摄方式航拍效率极高,在不受行走路线的影响前提下,完成5km 拍摄耗时在3h 左右,建模效率5km 在5h左右。
第三类:大场景的城市级别建模。采用倾斜摄影将是最方便,效率最高的方式。20 万㎡拍摄耗时4h,照片数量约1200 张,处理时间8h。
