鄱阳湖物理模型尾门控制系统的研制及应用
2020-10-28杨楠
杨 楠
(江西省水利科学研究院,江西 南昌 330029)
0 引言
鄱阳湖模型试验研究基地湖区模型主要模拟范围包括鄱阳湖湖区(指湖口水位站防洪控制水位22.50m(冻结吴淞高程)所影响的环鄱阳湖区)、五河尾闾、湖口及部分长江段(武穴至彭泽河段,长约100km),鄱阳湖湖区实体模型示意图见图1,模型平面比尺 1:500,垂向比尺1:50,变率为10。模型采用露天模型,最大长度346m,最大宽度140m,最小宽度6m,模型占地面60 000m2,其中模型水面面积约 为18 000m2,模型平均水深约17cm。模型尾部口门在长江彭泽段。长度9m,高度6m。水深变化范围25cm,由于尾门水位控制影响因素很多,人工调节响应速度慢,无法满足试验需求,因此本文设计模型尾门控制系统,通过改变横拉隔栅尾门开度来调节尾水位变化,使模型河道水位达到了较理想的调节控制效果。
1 方案设计及其工作原理
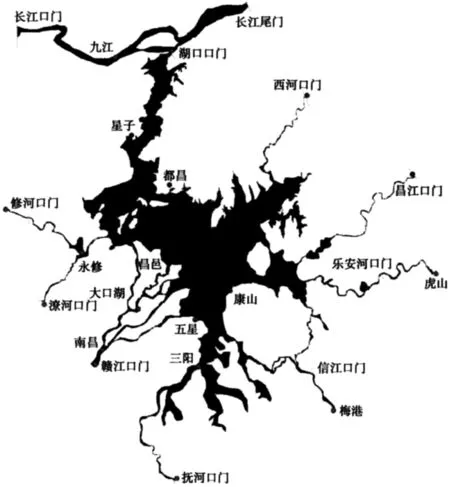
图1 鄱阳湖湖区实体模型示意图

图2 尾水控制系统原理框图
鄱阳湖物理模型尾门控制系统是通过自动调节尾门开度的方式来达到控制模型水位的目标,主要由嵌入式工控机(下位机)、跟踪式水位仪、伺服电机及传动机构和推拉尾门等组成。在模型尾门附近安装跟踪式水位仪实时采集模型的实际水位,将采集到的水位数据传输到下位机中,再与从上位机下传的给定水位值相比较,把得到的偏差值通过PID控制算法计算出输出控制量,将输出控制量送到步进电机以控制执行机构带动尾门移动,控制量的正负变化实现了尾门的打开与闭合,通过改变尾门开度的大小,从而改变尾门的泄水能力实现模型水位高低调节,不断检测出水位的偏差值来修正控制电压大小和方向,使水位逼近给定值,实现模型试验水位的自动控制[1~5]。控制系统原理如图2所示。
2 系统设计
系统包括硬件系统和软件系统,硬件系统主要由精密数字跟踪式水位仪、推拉尾门及尾门控制器构成。精密数字跟踪式水位仪主要完成实时水位的采集,尾门控制器接收上位机发来的开度命令,再转换成步进电机正转、反转步数,从而带动尾门连杆前进与后退,实现尾门的打开与闭合。软件系统主要是上位机计算机监控软件构成,主要完成控制水位与实际水位的PID算法控制计算输出控制量[6~9]。
2.1 硬件设计
2.1.1 精密数字跟踪式水位仪
精密数字跟踪式水位仪由传感器、主控电路、电源三部分所构成,主控电路以AT89C52单片机作为主控芯片控制步进电机,以步进电机旋转带动精密丝杆转动,使丝杆上的滑块做上下运动,进而测针作上下运动。步进电机每走一步,带动精密丝杆和测针直线上下运行0.05mm。步进电机正转,测针上行,步进电机反转,测针下行,以某一定点为基准,测针向下寻找水面,测针触水,立刻上行,脱水后又下行,这样反复跟踪水面,以基准点减去步进电机测针的行程,得到水面高度H,即水位。图3为JS-C型精密数字水位仪主控电路硬件框图,图4为JS-C型精密数字水位实物图。
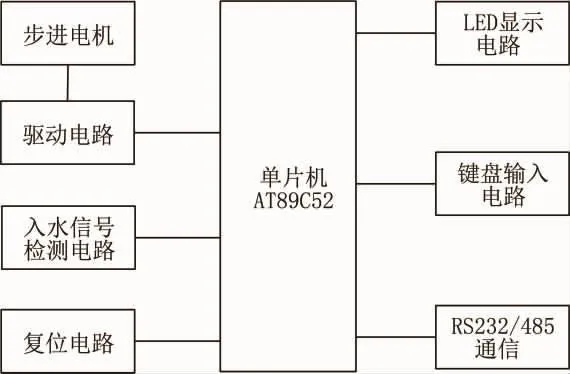
图3 JS-C型精密数字水位仪硬件框图

图4 JS-C型精密数字水位实物图
2.1.2 尾门系统
为保证模型尾水位过程的相似,需要选择合适的尾门形式。常见的自动控制尾门形式有格栅式横拉门和卧倒式翻板门两种。当模型水位变化不大时,格栅式横拉门出流量与开度几乎成线性关系,因此水位调节振荡小、精度高。鄱阳湖物理模型尾部口门的长度9m,高度0.6m。设计采用推拉式尾门结构,由活动门、固定门及其传动机构组合构成,两门的开孔互相错开,安装时两门重叠,图5为鄱阳湖物理模型尾门制作简图。工作时控制电机带动活动门左右运动,从而改变组合门开孔的大小,使之改变泄水量以达到调整水位的目的。由于电机受给定的水位变化规律控制,故尾门的动作也按给定的水位曲线变化规律而改变并达到模拟天然水位的目的[3],详见图6。

图5 鄱阳湖物理模型尾门制作简图

图6 鄱阳湖物理模型尾门工作简图
尾门泄水孔可设计成矩形薄壁堰形式,尾门开孔个数以n表示。据伯努里定律导出矩形堰的流量公式为:

式中,Q 为流量,m3/s;C 为流量系数;B 为堰宽,m;△h为堰顶水头,m。
模型要求最大泄水量为Qmax,水头为△h时,尾门开孔的总宽度可由下式表示:

式中,Qmax为流量,m3/s;其余符号意义同前。
当B确定后,单孔宽b的大小就取决于开孔个数n,b=B/n。n的大小直接影响到整个控制系统的工作状态。根据(1)式,尾门在工作时若B在单位时间△t内的的变化为△B,则引起的流量变化△Q的值为[2]:

式中,△Q为流量变化量,m3/s;△B为尾门开孔宽度变化量,m。
模型要求单位时间内流量变化的最大值△Qmax/△t,求得试验要求B值变化的最快速度为:

式中,△t为单位时间,s;其余符号意义同前。
因此,要求尾门移动的最大速度应为:

式中,V1为尾门移动最大速度,mm/s;△Bmax为尾门开孔宽度变化最大值,m。
若电机的转速为N,它拖动尾门的速度为V2,则

式中,V2为尾门可达到的移动速度,mm/s;β为丝杆螺距,mm;α为变速箱减速比;N为电机转速,r/min。
根据模型的实际要求与尾门控制器的参数选择计算,尾门选用三段格栅式横拉门,即有效长度l为2.7m一段的格栅式横拉门,孔宽b为0.16m,门高A为0.57m。同时,为适应露天的环境,整个尾门采用不锈钢材质加工而成。固定门与活动门之间采用上下滚轮结构,以减小活动门受重力和水压力作用而产生的摩擦力,安装效果见图7。
2.2 软件设计
尾门水位测控软件采用亚控公司的组态软件组态王KingView5.31。该软件作为新型的自动化监控软件,适应性强、开放性好、易于扩展、可以大大减少软件人员开发周期。

图7 尾门安装图
主控软件作为实现尾门水位实时调节的总控人机界面,软件设计时要求操作界面的设计人性化,具备简洁大方、形象美观等特点;操作界面应该突出重点,能够显示出量测控制系统的主要功能,让人一目了然,一些无用繁杂的后台界面应该省去。尾门水位测控软件操作界面如图8所示。
3 试验与应用效果
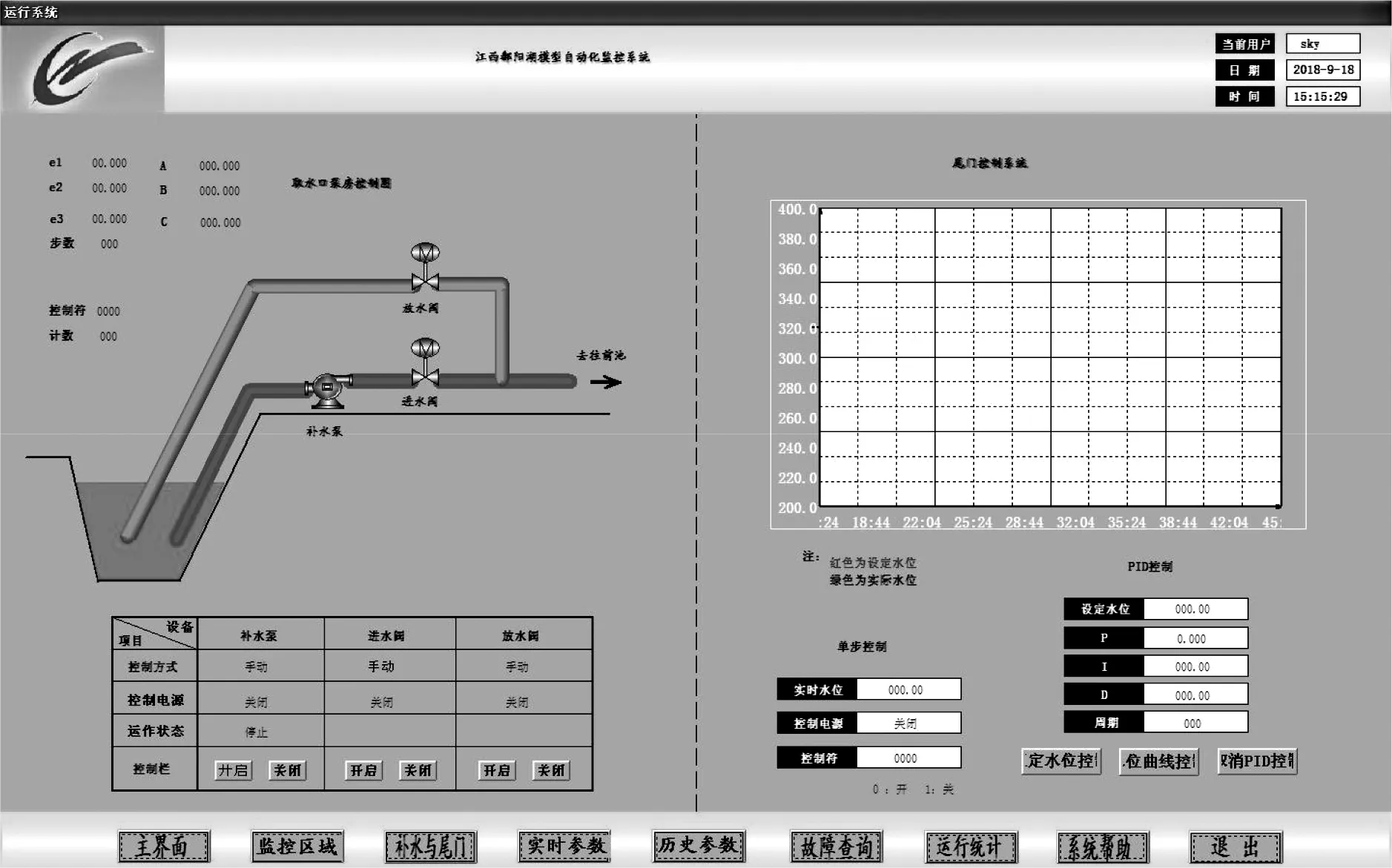
图8 软件控制界面
试验调试中,通过经验试凑法对比例放大系数Kp、积分时间常数Ti、微分时间常数Td三个参数的调整整定,得到系统较为满意的效果。将设定水位由原来的280mm设定为300mm后,通过PID运算控制,得到的曲线见图9。由图9可知,尾门水位控制系统响应迅速,达到平衡的调节时间较短,查看数据库记录,调节时间小于20min。
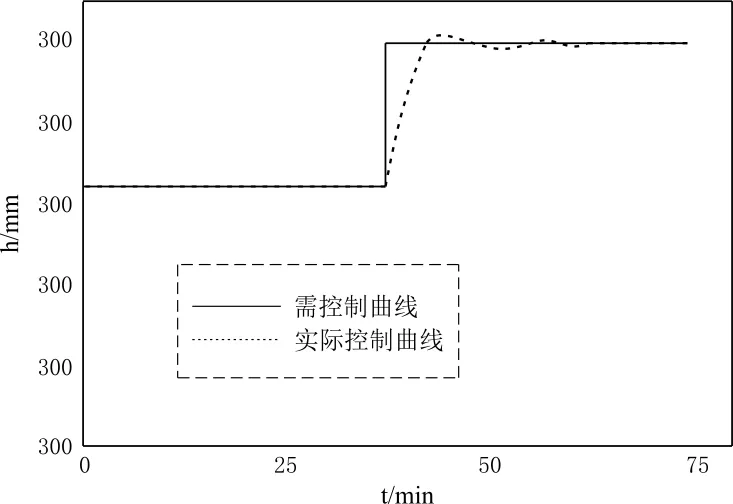
图9 尾门水位控制曲线
4 结语
在后期开展的鄱阳湖模型试验研究课题中,鄱阳湖模型尾门控制系统得到成功应用,上述运行成果表明系统运行稳定、可靠,试验操作方便,大大提高了试验效率和成果的可靠性,已完全能够满足模型基地开展大型水工、河工试验的需求。