港珠澳大桥21—31号墩顶间高差测量实验
2020-10-28沈家海
沈家海
(中交一航局第一工程有限公司,天津 300456)
0 引言
港珠澳大桥桥址处于开敞式、宽阔的伶仃洋海域,有跨距110 m的海中桥梁施工区域,桥墩采用埋置式承台形式,每个墩顶布置1个水准点,施工要求按照三等水准精度测量水准点间高差。110 m跨距不满足规范[1-2]中三等水准测量“视线长度臆100 m”的要求,需要进行跨河高差测量;在研究三角高程测量技术的基础上[3-6],提出了使用2组相同规格型号的全站仪、对中杆和棱镜进行同步对向观测三角高程测量方法,在21—31号桥墩进行了测量实验,计算精度指标。
1 原理与方法
考虑地球曲率和大气折光影响[7]的三角高程测量,仪器安置在A点,对中杆和棱镜竖立在B点,A、B点高差驻hAB用式(1)计算。

式中:S为全站仪测量的平距;琢为全站仪照准棱镜中测量的垂直角;R为地球曲率半径;i为仪器为地球曲率影响值;r为大气折光影响值,其正确值不易测定[7-8];v为棱镜高。
1.1 避免仪器高和棱镜高测量误差
图1(a)中,在A点沿横桥向1.5~3 m设置临时点A忆,1号全站仪安置在A忆,使用2组相同规格型号的对中杆和棱镜,分别安置在A、B点,在观测过程中保持棱镜中心距水准点高度一致,套用式(1)得式(2)、式(3),则计算驻hAB时能消掉仪器高和棱镜高值,如式(4),避免了测量误差;同理,图1(b)中,2号全站仪安置在B忆,测得驻h 。
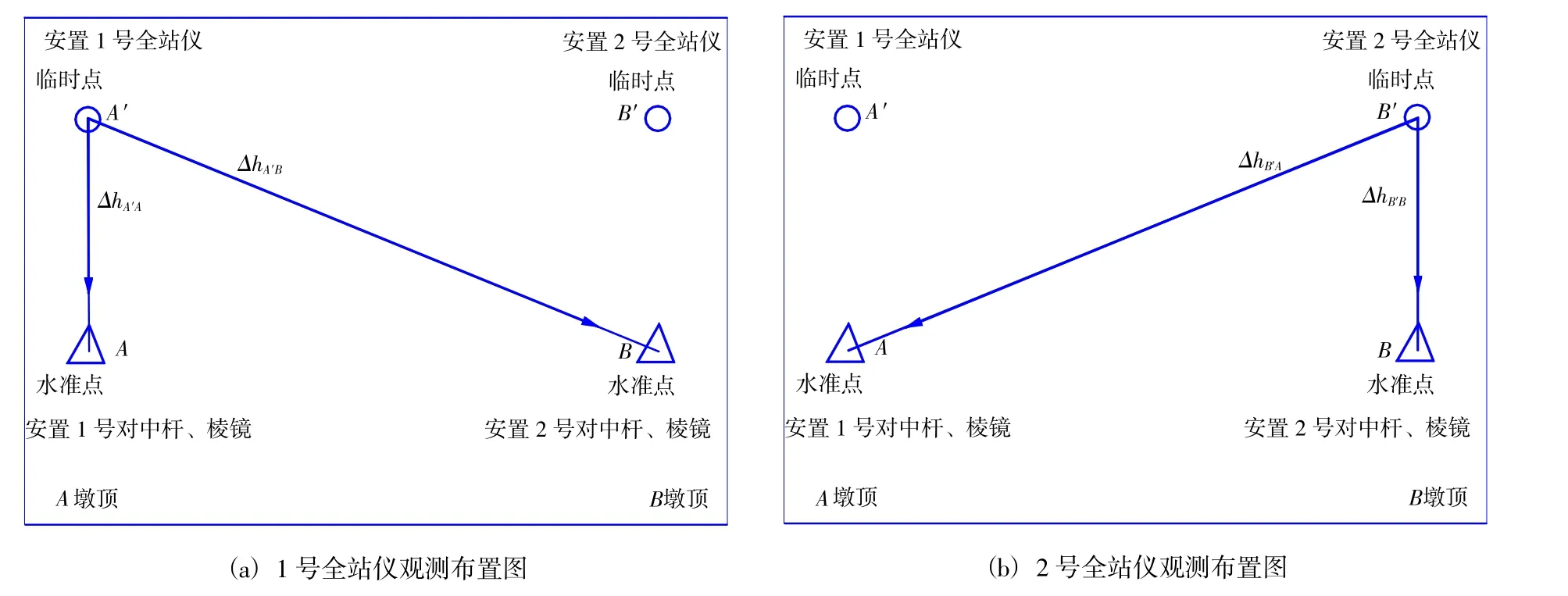
图1 避免仪器高和棱镜高测量误差的观测布置图Fig.1 Observation layout to avoid measurement error of instrument height and prism height
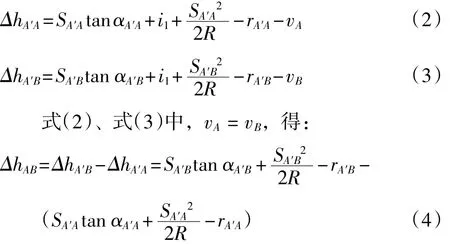
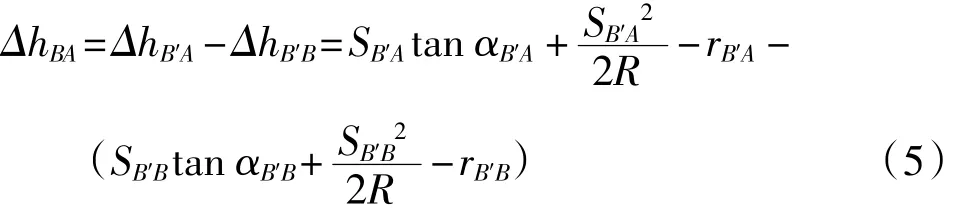
同理:
1.2 抵消地球曲率影响,削弱大气折光的影响
图2(a)中,2台全站仪同时进行观测,距离A忆B与AB忆基本相等,A忆至A、B点(B忆至B、A 点)距离比小于3颐110,视线A忆B与AB忆为间距很近的近似平行视线,认为大气折光影响是近似相同的,用式(6)计算A、B点高差。
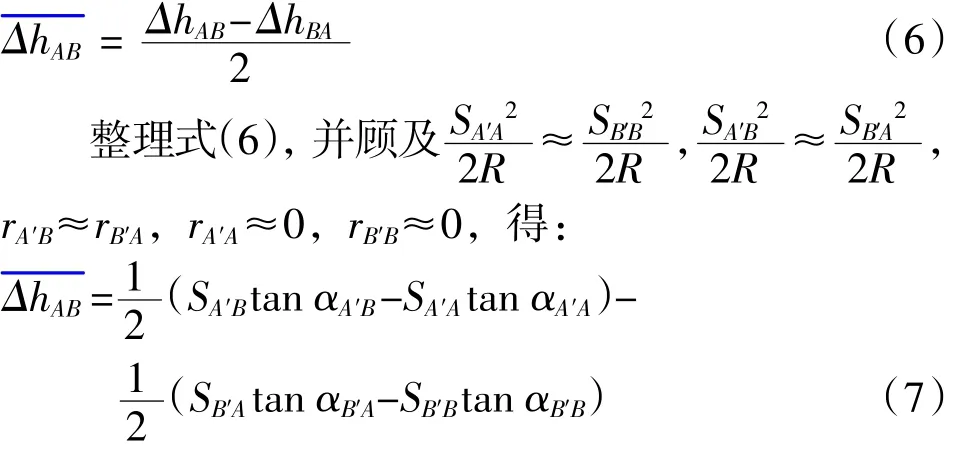
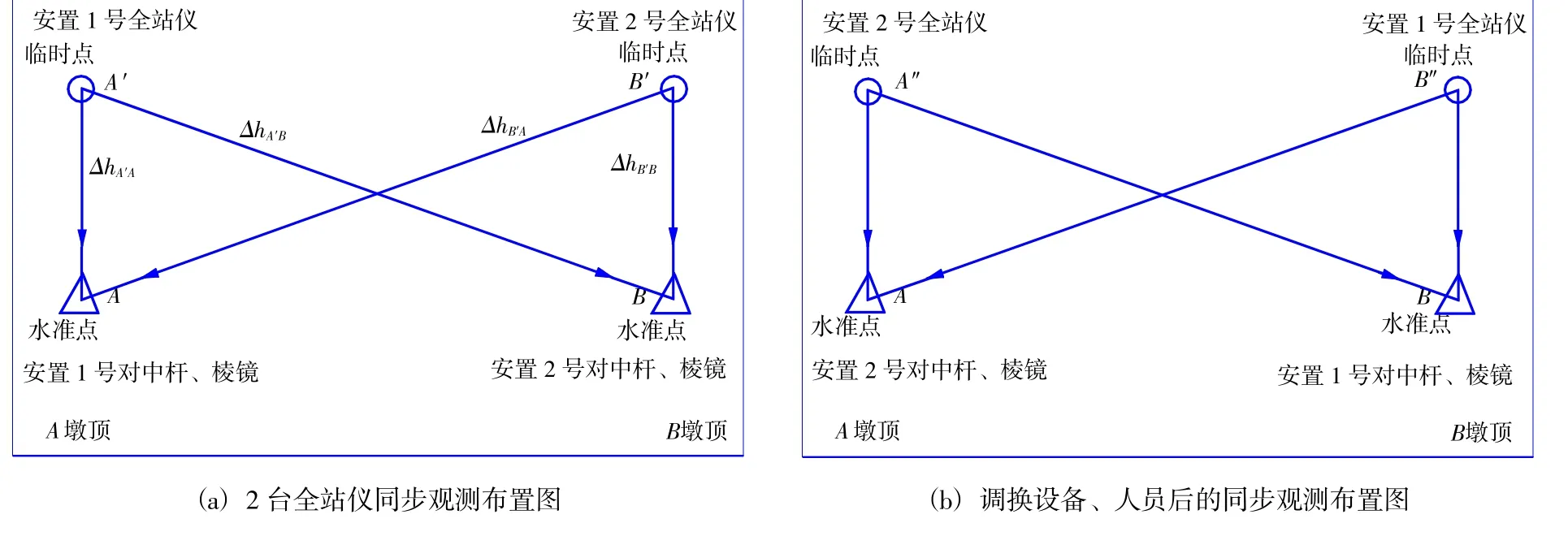
图2 观测布置图Fig.2 Surveying layout
1.3 抵消设备差和人员差
按图2(a)完成所有测回数后,测量设备和人员调换位置,再次观测完成图2(b),抵消测量设备差和人员差的影响。
2 测量要求及测区条件
2.1 精度要求
三等水准测量每公里水准测量的偶然中误差M驻不应超过3 mm、全中误差MW不应超过6 mm。
2.2 观测指标
国家水准测量规范对向观测指标如表1。
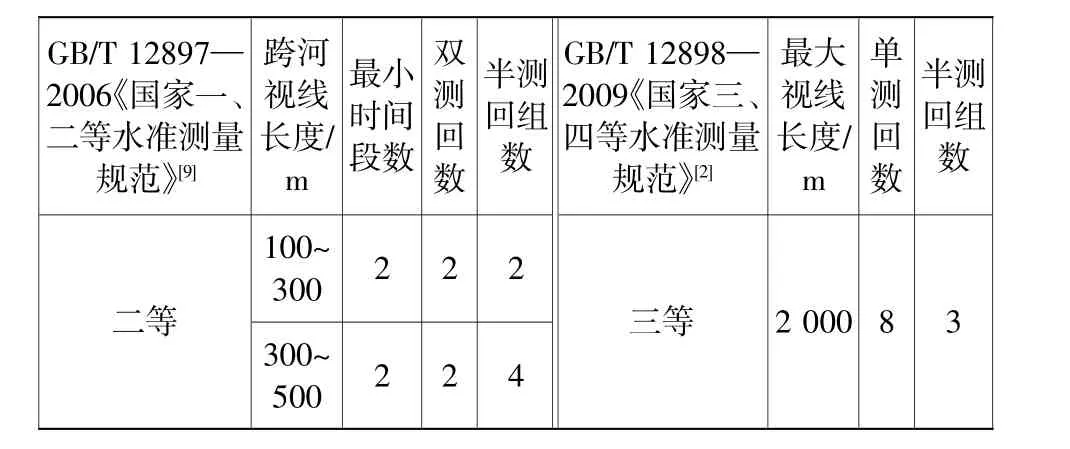
表1 跨河三角高程观测指标Table 1 The observation index of river-crossing trigonometric leveling
2.3 测区条件
测区处于开敞式宽阔水域的桥墩顶部,如图3;全站仪安置在墩身顶部照准目标后,受环境影响,其读数有波动,如图4展绘的垂直角一个测回100个连续数值的波动曲线图。

图3 测区条件Fig.3 Surveying area condition
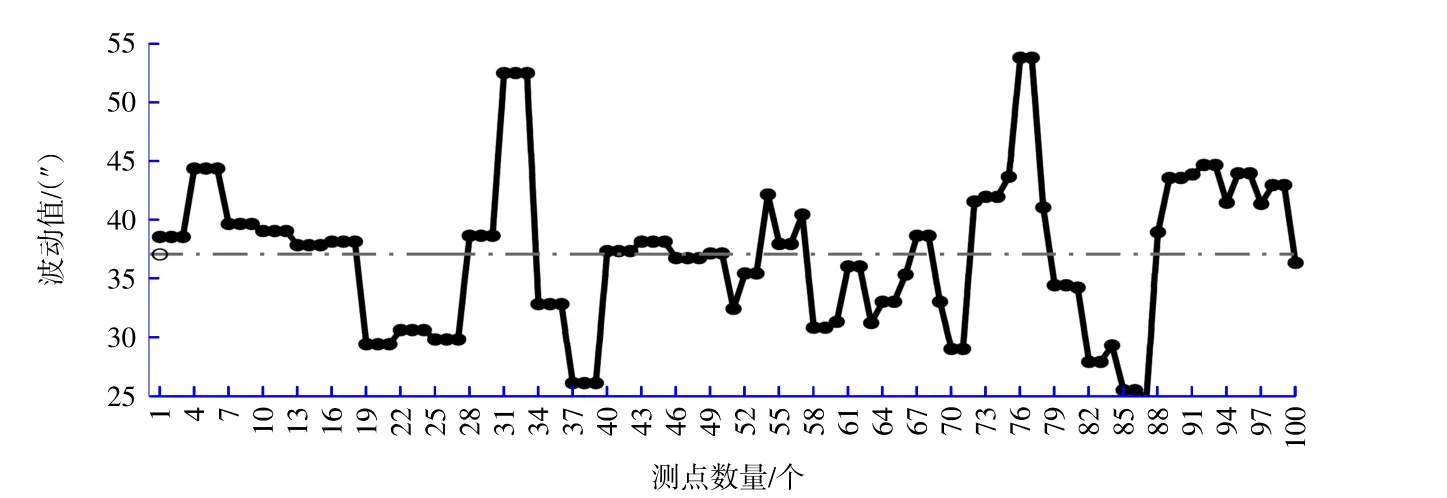
图4 垂直角波动曲线图Fig.4 Fluctuation graph of vertical angle
3 实验方案
场地布置按照图1、图2,同岸(离水准点近的边)高差和对岸(离水准点远的边)距离直接用全站仪测量;简化了规范[9]8.3中“大地四边形”的布置和观测方法。
3.1 垂直角测量方法
采用人工方式照准目标连续观测的方法;用数据线连接计算机和全站仪,采用自动数据采集软件记录观测过程中的垂直角数据,采样间隔设置为0.5 s。
3.2 技术指标
对照表1,《国家三、四等水准测量规范》中没有按照“视线长度”细化对应的指标。参考规范确定本次实验观测的指标,如表2。
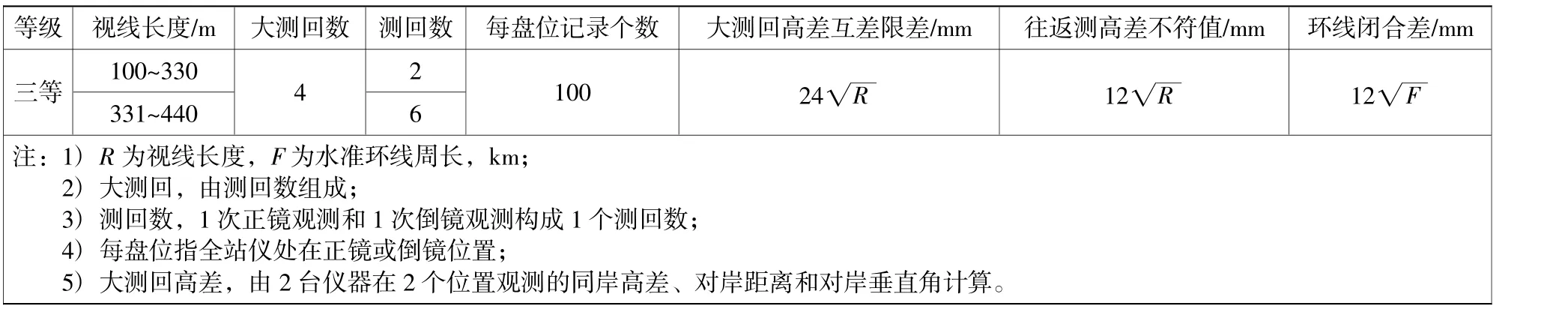
表2 对向三角高程测量实验观测指标Table 2 The observation index of the bilateral trigonometric leveling experiment
3.3 资源准备
司仪2名、辅助人员3名、交通船1艘、笔记本计算机2台、对讲机2部、空盒式温度气压计2支、准20 mm纯棉编织绳400 m,仪器设备见表3所示。
3.4 外业观测程序
1个测段观测过程中要保持2台全站仪同步操作,具体观测步骤如下:
1)安置仪器和棱镜,将棱镜与对中杆精密连接,避免间隙,将觇牌完全插入棱镜侧面的槽内,对中杆置于某一高度值,使棱镜和旁边仪器大致同高,记录天气状况、成像情况和时间;并与另一组确认对中杆高度,确保一致。

表3 仪器设备一览表Table 3 List of instruments and equipment
2)在全站仪内新建作业文件,自由设站方式,输入实测的温度、气压,设置测站点坐标和高程为0,仪器高、棱镜高为0。
3)同岸高差测量,全站仪测量近处棱镜的高差3个测回并存储在仪器中。
4)对岸平距测量,全站仪测量远处棱镜平距3个测回并存储在仪器中。
5)对岸垂直角观测,全站仪照准远处棱镜,观测垂直角。
6)对岸平距测量,同4)并检查2次平距差值,满足测距标称精度。
7)同岸高差测量,同3)并检查2次高差差值,不大于0.2 mm。
8)调换观测设备、人员,准备,步骤同1)~7)。
3.5 测段分布
测段有1跨、2跨、4跨,形成高差闭合环,见图5所示。

图5 21—31号墩测段分布图Fig.5 The distribution map of leveling section of No.21—No.31 piers
4 计算与分析
4.1 观测数据整理
1)用EXCEL编制计算专用表,由7个工作薄组成,其中前4个工作薄保存、计算4个测站的垂直角数据,第5、6个工作薄保存观测时存储在全站仪的数据,第7个工作薄计算最终高差。
2)检查指标差、指标差互差和垂直角互差。
3)计算各测段大测回高差互差限差,结果均合格。
4)计算往返测高差之差及限差。
5)计算高差闭合环闭合差及限值。
高差闭合环信息表和各测段信息表见表4和表5。
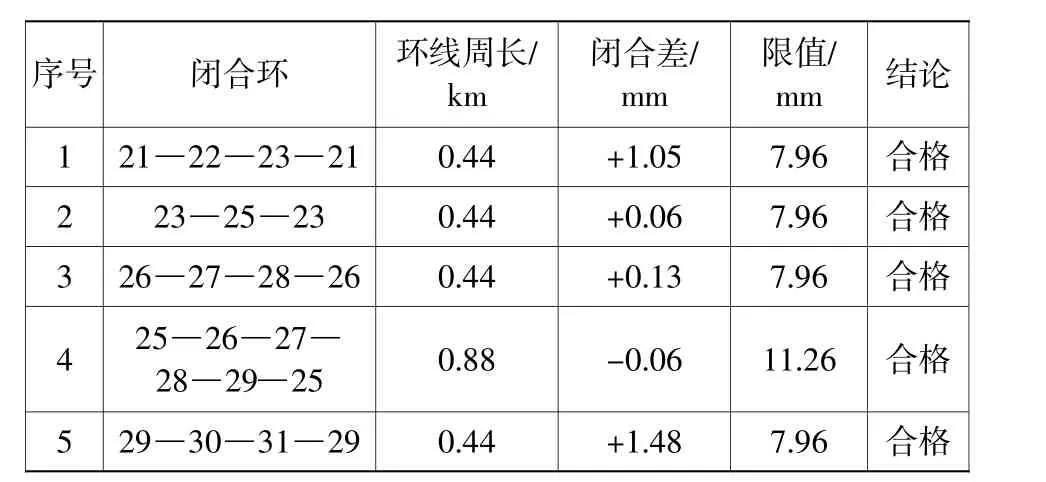
表4 高差闭合环信息一览表Table 4 The information list of all height difference closed loops
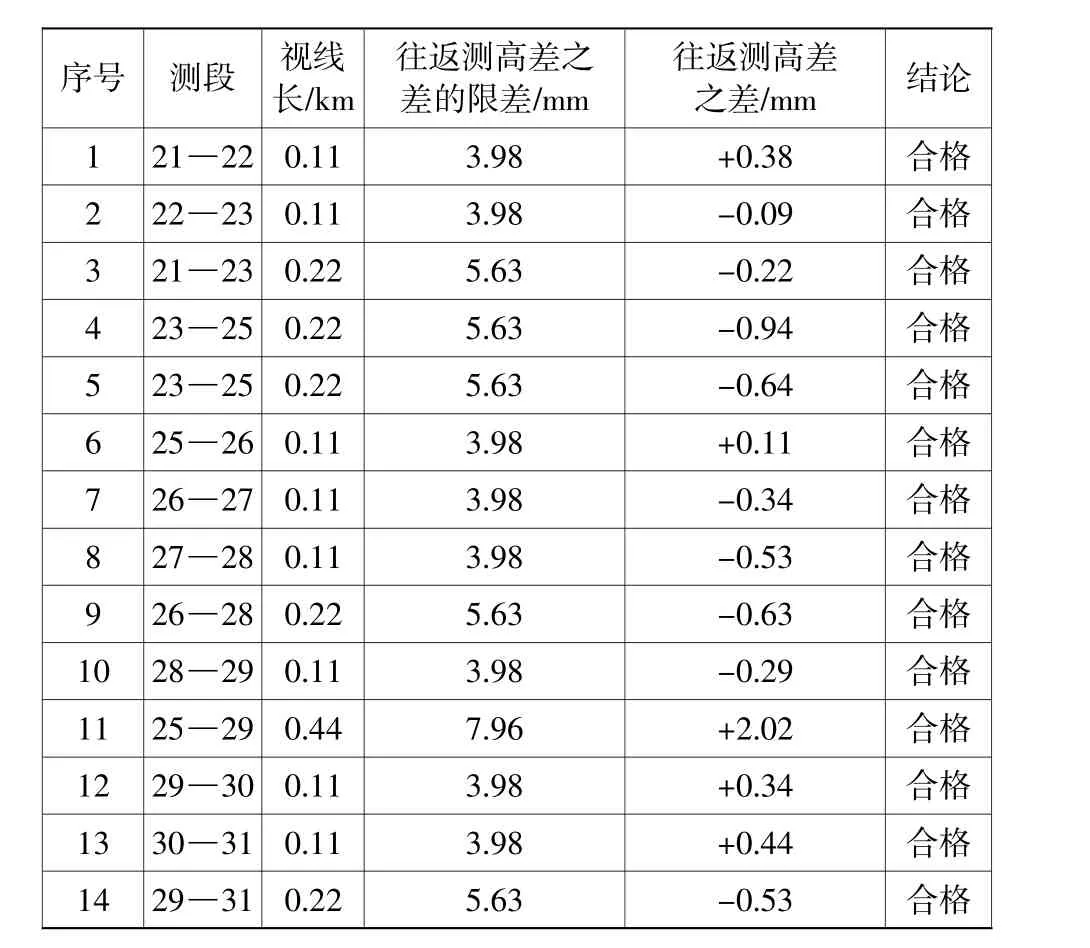
表5 各测段信息一览表Table 5 The information list of all leveling sections
4.2 精度计算
依据规范公式,按照表4、表5中数据计算M驻=0.70 mm,MW=1.23 mm。本次多余观测数小于20,为客观反映精度,根据GB 50026—2007《工程测量规范》中附录A,按照式(8)进行修正。

式中:滓为评定对象的中误差(母体中误差估值);KM为观测中误差修正系数;m为由观测数据计算的中误差(子样中误差)。
M驻多余观测个数14,KM取1.02,MW多余观测个数5,KM取1.15;修正后M驻=0.71 mm(小于限差3 mm),MW=1.41 mm(小于限差6 mm)。
5 结语
实验数据计算的精度指标达到了三等水准精度要求,表明方案中简化“迁仪器和标尺位置”的观测布置图、观测程序和技术指标是有效的,在保证测量精度的前提下提高了工作效率,可供类似测区、类似工程的高程测量工作参考。