基于反射标记物的激光导引AGV 全局定位方法研究
2020-10-27闫俊清
闫俊清

摘要:针对非完整AGV(automaticguidedvehicle)复杂非线性系统的高精度自由路径导引控制问题,提出一种基于激光传感器定位的路径跟随控制方法。首先在Serret-Frenet框架下建立AGV路径跟随运动学误差模型;然后基于Lyapunov直接法设计渐进稳定路径跟随控制器,解决AGV非完整约束控制的困难。最后采用多点激光反馈三角测量方法,实现AGV的精确实时定位。仿真结果表明,该控制器能够快速消除路径跟随误差,AGV系统运行平稳,能够精确跟随规定路径。
关键词:自动导向车;导引控制;路径跟随;定位;激光传感器
引言
自动导引小车(AGV)是一种具有光学或电磁特性的自动导引装置,具有停车选择、小车编程、安全保护等功能,也是现代物流系统中的重要组成部分。AGV在工业应用中的动力源为可充电蓄电池,一般通过电脑控制其运行路线和行为,或者设置电磁轨道规范其运行路线,AGV根据电磁轨道提供的信息进行相应动作。和其他移动机器人相比,AGV具有工作效率高、可控性强等优势。和物流运输中的其他设备相比,AGV不需要在活动范围内设置支架等固定装置,并且不受空间、场地的限制。AGV在自动化物流运输系统中的应用,由于其具备自动化、可控性高等特征,能够实现灵活、高效的无人生产模式[1]。AGV的动力源为电池,导引方式有电磁导引、直接坐标导引、激光导引和图像识别导引等,激光导引是其主要导引方式,可以实现非接触导引并根据实际需求更换移载机构,以完成不同的操作任务。激光导引AGV系统由地面控制系统、车载控制系统和导航系统三部分组成,不同项目对系统的需求存在差异,也让系统变得更加复杂。
1激光导引系统设计
AGV方向控制是接受引导系统的方向信息通过转向装置来實现的.转向装置的结构通常设计成两种形式:铰轴转向式和差速转向式.前者的方向轮装在转向铰轴上,转向电机通过减速器和机械连杆机构控制铰轴从而控制方向轮的取向;后者在左、右两轮上分别装上独立的驱动电机,通过控制左、右轮的速度比来实现车体的转向。如图1所示,在L、R两轮上分别装上独立的驱动电机,C、D两轮在旋转和取向上都是自由的,它的稳定性较好,承载能力较大.vL、vR分别表示两驱动轮的速度,图示时刻小车中心线与目标路径偏差为e,小车前进方向与目标路径之间的夹角为兹,运动控制系统只要通过控制电机,使L、R两轮产生一定的速度比,就可以差速转向实现路径跟踪。通过对驱动车轮的电机转动角度的周期性采样可以获得车轮前进或后退的距离.增量式光码盘连接在左、右驱动电机轴上,随着电机的转动,光电编码器发出A、B两项脉冲,相位的超前或滞后关系代表了电机的正转或反转。鉴相电路与脉冲计算电路相结合,可判断出左、右电机正转和反转的角位移变化情况.在理想情况下,电机轴的角位移与AGV左右驱动轮行走的距离存在比例关系.将上述光码盘发出的脉冲进行滤波,鉴相与计数处理后所得信息由路径轨迹推算导向法(dead—reckoning)可实现对AGV行驶路径的估计。激光导引AGV的位置计算是利用小车当前运行的速度、转向的角度、间隔时间等参数对下一位置进行估算,计算出的是相对于前一位置的新位置.根据估算的新位置关联反射镜,根据关联的反射镜修正自身位置,车载控制计算机将当前方位与目标点方位进行比较,据此比较的结果给左、右电机发送驱动控制信号,从而实现激光导引AGV的自动引导。
2激光导引AGV系统的应用方法
2.1确定AGV的操作方式与数量
AGV系统在应用过程中首先必须确定操作方式和数量。可以根据系统的具体情况以及用户需求选择操作方式,常用的操作方式有叉车式、牵引式等。如果遇到特殊情况,一个系统可以运用几种不同的操作方式[4]。AGV的数量一般根据系统的运输能力,运用仿真计算的方式确定。
2.2AGV安全防护的选用
AGV中除了需要安装声光报警系统外,还应该安装一些障碍探测器,便于车辆在运行路径中探测障碍物。常用的探测方式有超声波探测、光电探测和激光扫描探测等。激光扫描探测具有更大的优势,但成本较高,光电探测简单实用,但探测效果不佳,因此工作人员应该根据具体情况合理选用。
2.3AGV中反射板的设置和路径规划
AGV中反射板的设置,应该根据设备行驶区域的具体情况进行安装,安装数量遵循安全、准确的原则。反射板设置过少不利于安全导引,设置过多也会影响导引的精度[5]。AGV的路径规划属于基础性的工作,通常和系统的总体方案一起确定,在规划过程中应该结合AGV的数量、操作方式等信息,以及运行场所的具体情况,尽量保障AGV的运行路径畅通。
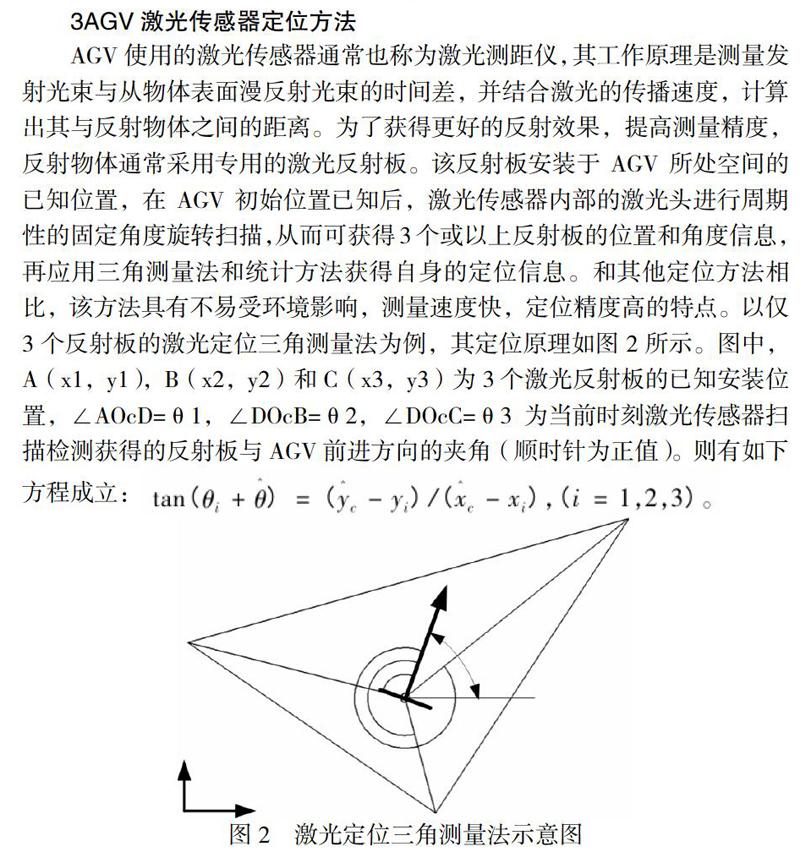
3AGV激光传感器定位方法
AGV使用的激光传感器通常也称为激光测距仪,其工作原理是测量发射光束与从物体表面漫反射光束的时间差,并结合激光的传播速度,计算出其与反射物体之间的距离。为了获得更好的反射效果,提高测量精度,反射物体通常采用专用的激光反射板。该反射板安装于AGV所处空间的已知位置,在AGV初始位置已知后,激光传感器内部的激光头进行周期性的固定角度旋转扫描,从而可获得3个或以上反射板的位置和角度信息,再应用三角测量法和统计方法获得自身的定位信息。和其他定位方法相比,该方法具有不易受环境影响,测量速度快,定位精度高的特点。以仅3个反射板的激光定位三角测量法为例,其定位原理如图2所示。图中,A(x1,y1),B(x2,y2)和C(x3,y3)为3个激光反射板的已知安装位置,∠AOcD=θ1,∠DOcB=θ2,∠DOcC=θ3为当前时刻激光传感器扫描检测获得的反射板与AGV前进方向的夹角(顺时针为正值)。则有如下方程成立:
结语
本文从定位方法和控制器设计两个方面研究了非完整AGV的路径导引控制问题,建立了包含AGV参考点与参考路径之间距离误差和角度误差的路径跟随误差控制模型,分析激光传感器多点反馈定位原理,并给出直线和圆弧路径的误差计算模型。借助Lyapunov理论,获得渐进稳定且结构简单的路径跟随控制器。仿真试验表明,该控制器能够快速消除路径跟随误差,且误差值较小,下一步将进行实际AGV系统研究。
参考文献
[1]邹细勇,徐德,李子印.非完整移动机器人路径跟踪的模糊控制[J].控制与决策,2008(6):655-659.
[2]张香圃,任乃飞,张海军.非接触式IC卡在视觉导引AGV运动控制中的应用[J].机械设计与制造,2011(11).
[3]陈顺平,梅德庆,陈子辰.激光导引AGV的自动引导系统设计[J].工程设计学报,2012(05).
