100 W无铁心永磁同步电机控制器设计
2020-10-27童雅静王晓光吕雪刚王宇非
童雅静,王晓光,吕雪刚,王宇非
(湖北工业大学电气与电子工程学院,湖北 武汉 430068)
随着高性能永磁材料的发展,永磁同步电机逐渐成为电机市场的重要组成部分[1]。在此基础上,无铁心永磁同步电机具有体积小、重量轻、转矩脉动小、电磁转换率高等优点[2],可以有效提高电动机驱动系统的过载能力和瞬态响应能力,在高性能伺服驱动领域、小功率无人机、高性能电动执行机构等领域具有较大的应用前景,所以无铁心永磁同步电机的控制技术成为必须解决的主要问题[3]。基于电力电子技术以及微型计算机的发展,矢量控制算法使电机具有出色的静态及动态性能,扩大了交流电机的使用范围和应用市场。笔者基于无铁心电机的参数特点,采用矢量控制算法实现了对电机驱动控制,为该电机驱动系统的发展提供一定的理论参考和开发经验。
1 永磁同步电机的数学模型
由于电机实际运行和理想状态不同,存在一些耦合以及高磁谐波的影响,使得电机的电磁关系变得极为困难,因此将进行以下假设:
1)电机定子绕组是星型接法,三相绕组在空间上是对称分布,两者差值为120°。
2)电机的气隙磁场按正弦分布,忽略高磁谐波带来的影响。
3)电机的反电动势是按正弦分布。
4)忽略电机的阻尼作用;
5)电机的磁路是线性的,可以使用叠加原理,忽略涡流效应和磁滞。
满足以上假设的永磁同步电机可以被视为理想电机,忽略实际运行带来的影响,这样有利于建立基本的数学模型[4]。根据电机的双反应理论,可得到基本的电压方程及磁链方程:
电机的转矩方程:
因为盘式无铁心永磁电机交直轴电感一样,即Ld=Lq,所以采用id=0的矢量控制算法,上式可写为
运动方程

2 矢量控制算法设计
永磁同步电机的转子磁链是恒定的,因此选择使用转子磁链定向控制,这样控制电机的定子电流的幅值即可控制电磁转矩。无铁心永磁同步电机的d轴、q轴电感相同,因此采用id=0的电流控制方式,转矩与电流幅值成正比,获得最大转矩电流控制。整个系统选用矢量控制原理,配合SVPWM调制,可得到矢量控制的基本框图(图1)。
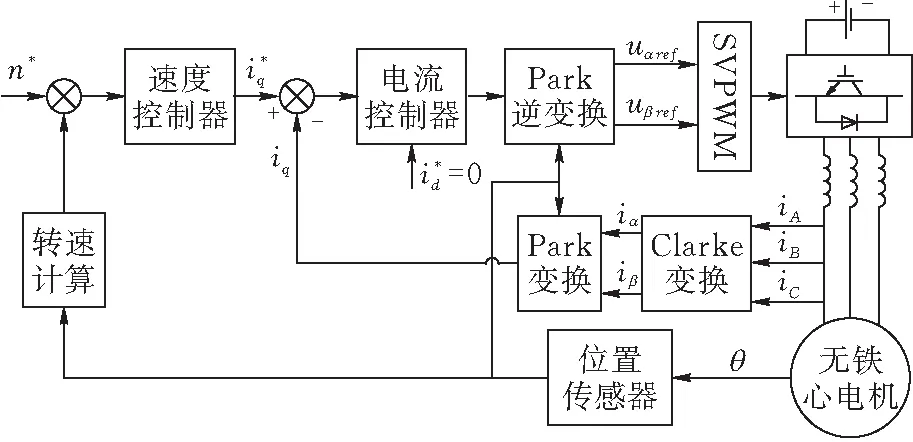
图1 矢量控制基本框图
控制系统的电流环参数以及速度环参数均参照Ι型系统整定,并且采用内模控制器进行参数设计,减小参数调节的难度。最后得到电流环的调节参数为:
其中,α是设计参数,与电机的时间常数有关。电机的时间常数
(1)
3 仿真结果分析
参照实验电机的基本参数,确定电机仿真所使用的电机参数,并且根据前面系统的参数设置来进行仿真的参数调节。电流环与速度环均采用内模控制器的方法正定成为Ι型系统。剩下部分,按照电机的数学模型以及矢量控制原理计算公式来建立仿真模型。电机的参数见表1。基于Simulink的仿真结果见图2、图3所示。当电机启动时,定子电流和电机转矩都会突然增加,电动机转速将超过预定量,但是很快就会回落并稳定下来,此时转矩约为0.17 N·m,并且电机最大转速大概是3400 r/min,稳定在3000 r/min,电磁转矩存在一些高频转矩脉动,但转矩整体效果比较稳定。电机的电流在0.01 s之后恢复到稳定的正弦波,电流峰值大概是4 A,正弦度较好。电机空载启动时,容易发生电流过大的情况,因此需要在控制算法中对最大电流进行限幅控制。由于电机的电磁转矩非常小,受到小电感的影响,电机转矩脉动较大,仿真结果见图2。
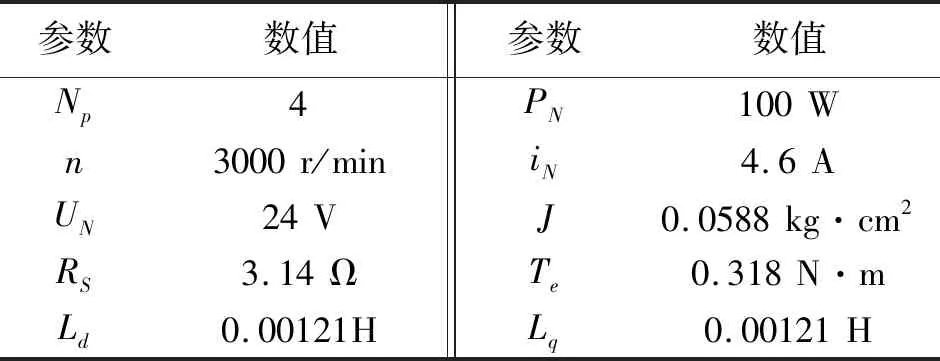
表1 实验样机参数
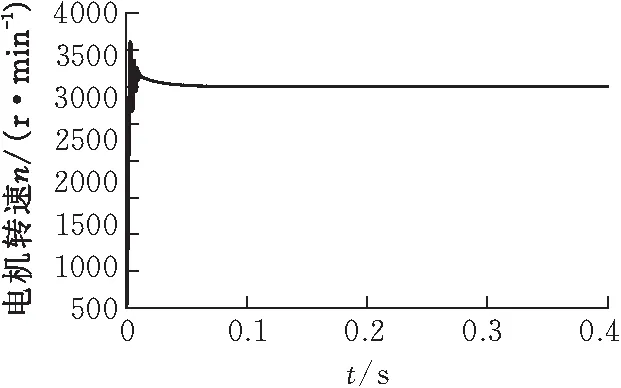
(a)电机转速
电机在过载运行时的仿真结果如图3所示,由于电机过载运行,电机的转速会迅速下降,稳定运行后,电机的转速还会有震荡,波峰和波谷之间相差大约200 r/min。在过载运行工况下,电机的电磁转矩有大量的高频脉动,这样的现象也发生在定子电流中,电流最大值接近23 A,此时已经接近电机可承受的最大电流,长时间的过载运行有烧毁电机定子绕组的风险。
从图3可以看出,当电机的负载发生变化时,转速下降,电流和转矩几乎是突变的,电机在过载运行时,电机的负载能力到达顶峰,电机无法再提供更大的稳定的电流,由于电源电压的限制,电机的转速会有较大的下降。相较于轻度过载时的稳定运行,严重过载时电机的转速大约下降了一半,并且电流增大了一倍,电磁转矩也增加了1倍,这几乎是电机的极端运行情况,系统能在0.01 s内将转速基本稳定下来,虽然不是一条平滑的曲线,但是稳定在了一个低速运转的范围之内。
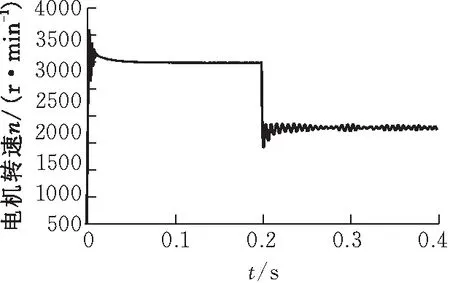
(a)电机转速
由以上的仿真结果可以看出,系统的运行良好,PI控制的参数设置比较适宜,和电机的固定参数比较符合,但是受限于电机的数学模型简单,用MATLAB仿真结果比较理想。通过改变电机运行工况,可以获得系统不同状态下的参数,从而增强对参数的认识和分析,极大地提高了设计环节的效率。
4 实验结果及分析
本文采用的样机为盘式无铁心永磁同步电机,电机参数见表1,所使用的控制器以TMS320F28027F为核心,以DRV8301DCA为驱动,配合电源等器材搭建了实验平台(图4)。
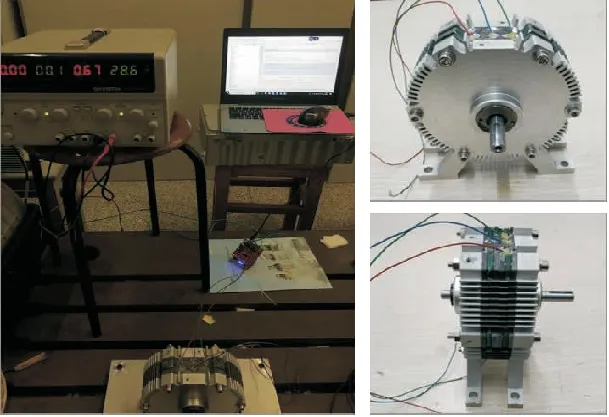
图4 实验平台及样机
实验过程中,以仿真出的参数为依据,对实际的电流环及速度环进行调整,并测量电机的运转情况。可以测得电机的实际相电流见图5。
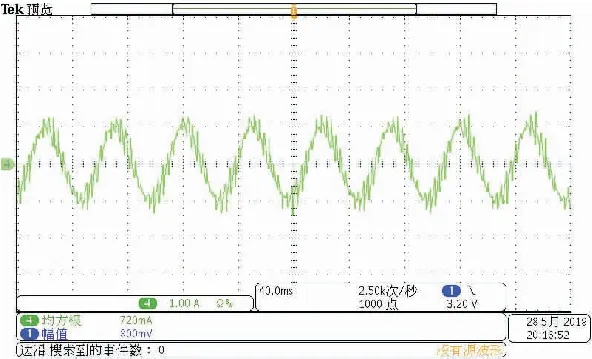
图5 绕组相电流
从图5中可以看出,电机绕组相电流基本上是一个正弦波,但是电机的电流波形存在大量的高次谐波,导致电机在运行中存在高频的转矩脉动和噪音。主要是因为无铁心电机的定子绕组电感很小,导致电流变化很快。本实验中逆变桥的开关频率为5 kHz,开关频率较低,不足以使得绕组中的电流连续,所以会产生高频的电流脉动。但是基本吻合电机的运行条件,实现以低电压控制器来驱动高速无铁心永磁同步电机的效果。
5 结论
从无铁心永磁同步电机的结构特点出发,建立PMSM电机的数学模型,结合SVPWM搭建无铁心永磁同步电机矢量控制系统,运用传统的调速方法,结合无铁心电机的结构,采用转子磁链定向控制法,实施对于无铁心永磁同步电机电磁转矩的控制,之后建立MATLAB仿真并搭建相关的实验平台,仿真及实验结果验证该电机由于电感小导致高频转矩脉动的结论。同时也可以预见,提高逆变器的开关频率可以有效减小转矩脉动。而随着宽禁带功率开关器件技术的成熟及开关频率的提高,势必会为该电机驱动控制技术的发展提供有利条件,使得无铁芯电动机驱动系统得到广泛的应用。
