开关磁阻电机的分析与研究
2020-10-26王爱花谢海良
王爱花,谢海良
(漯河职业技术学院,河南漯河 462000)
开关磁阻电机系统(Switched Reluctance Motor Drives,SRD)同时具有交流变频调速和直流调速系统的优点,经济指标和运行性能都明显优于以上两种调速系统,广泛应用于家用电器、航空航天、电子、机械及电动车辆等领域。作为SRD核心的开关磁阻电机(Switched Reluctance Motor,SRM)是一种具有广阔应用前景的电机,它启动电流低,调速范围宽,结构简单且坚固,具有较高的系统可靠性。
1 SRD的结构
SRD 主要由5部分组成,分别是SRM、电流检测器、位置检测器、功率变换器、控制器,如图1所示。
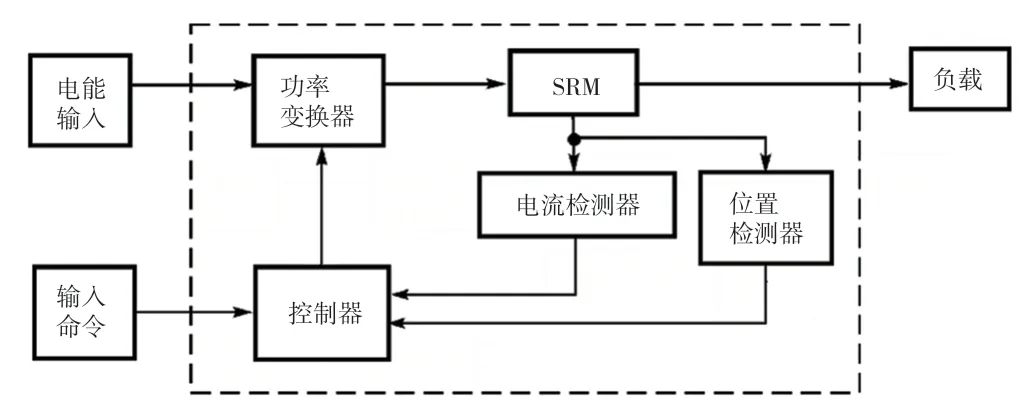
图1 开关磁阻电动机系统框图
SRM 是SRD 的执行部件和动力输出机构,它负责完成控制者下达的控制指令,最终将系统的电能转换为机械能输出,是SRD 中机电能量转换的部件,也是整个系统的核心部件之一。
功率变换器把蓄电池的直流电能以合适的方式转换后提供给SRM。因为SRM 绕组的电流是单向的,所以功率变换器不仅结构简单,而且相绕组与主开关器件采用的是简单的串联连接方式,避免了直接短路故障现象。功率变换器主电路的结构形式由供电电压、电动机相数以及主开关器件的种类所决定,它是SRD 能量传输的通道,直接用来驱动SRM,因此功率变换器是影响SRD 性价比的主要因素之一。
SRD 系统通过控制器对SRM 运行状态进行控制。控制器对电流和位置检测器的反馈信息,速度指令和速度反馈信号进行综合处理后,控制功率变换器中主开关器件的通断,实现对SRM 运行状态的控制。因为SRM 的运行状态取决于控制器,所以控制器的优劣将会直接影响到其运行性能。
位置检测器用来检测转子位置以及提供速度信号。电流检测器用来检测系统的电流信号并提供电流信息来完成电流斩波控制或采取相应的保护措施以防止出现过电流现象。
2 SRM的结构
SRM 的结构和工作原理与传统的交直流电机有很大的区别,如图2所示为三相6/4极SRM 的模型,定转子都由硅钢片叠压成凸极结构,定子为集中绕组,转子无绕组。

图2 三相6/4极SRM模型
根据定、转子齿数的不同可以有各种结构,表1列出了SRM 几种常见的定、转子极数组合方案。增加相数可以减小转矩脉动和降低电磁噪声,但其控制、结构也随之变得复杂,成本有所增加,目前三相6/4极和四相8/6极结构的SRM 技术较为成熟,应用较多。

表1 SRM常见的定、转子极数组合方案
3 SRM的工作原理
如图3所示为四相(8/6)极SRM 结构原理图,为便于分析,图中只画出A相的绕组及其电路。SRM 的运行遵循磁通沿磁阻最小路径闭合的原理,凸极转子在转动到最小磁阻位置时,其主轴线与磁场的轴线重合。当定子A—A'极励磁时,a—a'向着与A—A'轴线重合的位置转动,A相励磁绕组的电感达到最大。若把此时图3中定、转子位置作为起始位置,按照D—A—B—C的次序给相绕组通电,转子即逆时针转动;反之,若按照B—A—D—C的次序给相绕组通电,转子即顺时针转动。由此可见,相绕组通电的顺序决定了SRM 的转向,电流方向与SRM 转向无关。

图3 四相8/6极SRM结构原理图
4 SRM的主要参数

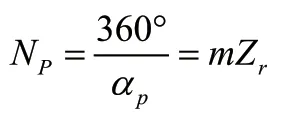
SRM 每一转绕组通断次数NP为:
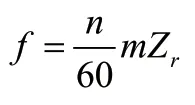
当SRM 以转速n(r/min)转动时,其总的切换频率为:
则SRM 的同步转速为:
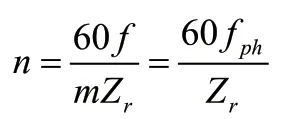
式中:fph为每相绕组开关频率,Zr为转子极数,m为电机相数。
由此可见,SRM 的转速取决于电流的切换频率,或者说取决于每相绕组的开关频率。
5 结语
通过对SRM 的结构、系统、工作原理以及主要参数的必要分析研究,对SRM 所具有的低启动电流、宽调速范围、高可靠性等优点有了更深的了解,为SRM 的设计、改进和推广应用奠定了坚实基础。
