模糊+PID控制在换热器进水流量控制研究①
2020-10-26周先飞杨会伟
周先飞,杨会伟
(芜湖职业技术学院信息工程学院,安徽 芜湖 241000)
0 引 言
换热器是一种将热流体的部分热量传递给冷流体的设备[1]。一般在换热器内部流动着两股流体,它们之间的热量交换是通过热传导来进行交换,因为两股流体是不能进行接触的。换热器中变化的参数非常多,所以对其进行精确控制是很重要的,可以提高设备的生产效率。研究换热器的进水流量控制可以提高整个系统的运行性能,并节约能源。
1 进水流量控制数学模型
进水流量的数学模型的建立,是根据其工作原理来确定的,由于其可以由换热器本身的结构来确定,所以可以直接采用动态结构图的方式来建立其数学模型,并在Simulink的环境下直接来对进水流量的数学模型进行搭建。
液体的运动[2-3]必须遵循质量守恒的普遍规律,水流的连续性方程就是质量守恒定律的一种具体形式。换热器进口装置可以简化成一个在侧壁开了个小孔的水箱。可以应用水力学中的孔口出流来分析换热器的进口水流量的问题。其示意图如图1所示
设流体表面的压强为大气压,而流体在其进出口流动时其压力是不变化的。在分析孔口出流时,先做以下一些假设,可以在讨论总流的能量方程时大大简化。首先水流是恒定流。设孔口的水面高度是固定的,其值为H。在孔口其各点的流速是一个固定值,其方向也是相同的,其大小为出口的平均流速。

图1 薄壁小孔口出流
有图1可知在液体流出孔口时,其进出口面积是不一样的,且有出口面积小于孔口面积。
根据图1,可列出流体在进出口的能量守恒方程式
(1)
将已知条件代入上式,得:
(2)

则
(3)
式3中,φ称为孔口流速系数,可得到孔口的流量公式
(4)
式4中μ为孔口流量系数,μ=εφ
则水箱的孔口出流的流速、流量计算公式为
(5)
(6)
从水箱的孔口出流的流速、流量计算公式可以看出,水箱的孔口出流的出水流量取决于出水管截面积和和水箱中水位的高度值H。为此可以将对换热器出水口水流量转化为对水箱水位H的控制[4]。
下表1列出建立换热器流量数学模型的参数

表1 水箱参数表
由文献[3]得到,在一般情况下孔口断面收缩系数ε=0.60~0.64;孔口水头损失系数ξ=0.06。
取μ=0.62。
可在Simulink模型窗口里面,建立的动态结构图如图2所示。
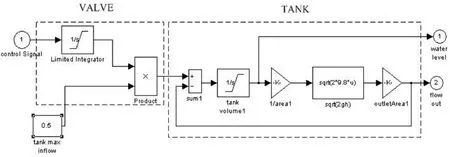
图2 进水速度控制数学模型
由图2可知,换热器的进口水流量此刻可直接有水箱的水位高度来确定。以后即可用相应的控制算法来对上述的数学模型进行控制。
2 进口水流量模糊PID控制算法
首先分别来讨论模糊控制和PID控制[5-7]的各自的优缺点。模糊控制最大的优点就是设计的时候不需要建立被控对象的数学模型,对那些具有时滞、非线性和时变的系统有很好的控制能力,而且模糊控制的鲁棒性很好,当系统的参数发生改变的时候,模糊控制能会好的修复并控制。模糊控制的缺点在于其不能消除稳态误差,所以在搞精度的控制场合不很适合。PID控制的最大特点在于它的结构简单,对于线性系统很好的控制,并有稳定性好,可靠性高等特点。但是对于上述所说的滞后、非线性和时变的系统PID控制则不能很好的控制。所以两种控制方式都有其各自的优缺点,而且更重要的是它们的优点和缺点可以互补,因此,设想能不能将模糊控制和PID控制想结合,产生新的控制算法来控制换热器进水流量。
问题的关键是怎么才能利用各自控制的优点而屏蔽它们的各自缺点,然而其实模糊控制是一种数字控制,所以对输入量的处理是离散且有限的。并且它没有积分环节,所以必然会有稳态误差,还可能在平衡点附件出现振荡现象。而PID控制在平衡点附近的小范围内调节是十分有效地,可以消除稳态误差。
图3为设计的模糊+PID双模控制结构框图

图3 Fuzzy+PID双模控制
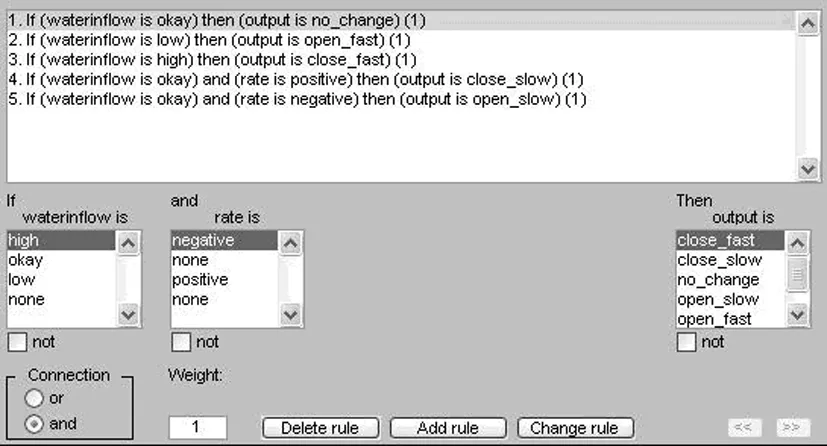
图4 模糊规则编辑器
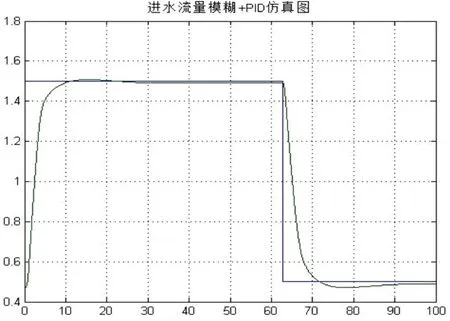
图5 进口水流量PID-Fuzzy双模控制仿真
通过图3知道,关键是何时将模糊控制切换到PID控制,也就是要确定一个阈值,然后使模糊控制和PID控制进行自动的切换。
切换阈值的大小是个关键。从模糊控制切换到PID控制的阈值要选择的恰当。如果阈值选择的太大,模糊控制作用还没有完全发挥就已经进入了PID控制,这样会影响到系统的响应速度和超调量。反之的话,如果阈值选择过大的话,当模糊控制已经快趋于稳态的时候再进行切换,就会出现较大的一个超调,而且系统也不会一下子就稳定,增加了系统的调节时间。所以要找到一个合适的阈值是非常重要的,下面通过公式来分析。

图6 进口水流量Fuzzy控制仿真、PID仿真结果
对模糊控制器来说,输入信号为误差信号,需要将它转化到模糊控制的误差论域所对应的一个值,即
nk=INT(keek+0.5)
(7)
当nk=0时,|keek|<0.5 , 又ke=n/e。n为基本论域的大小。
(8)
有文献[5]知n= 6,因此得到: |ek|<7%e
也就是说当|ek|<7%e时,模糊控制已经不起作用了,所以此时应该要切换到PID控制。
此时利用式9的PI算法,来继续对系统进行控制,直到消除稳态误差,使系统趋于稳定。
Un=Un-1+Kp(En-En-1)+KIEn
(9)
其中Kp为比例系数,KI为积分系数,U为PI的输出控制量。
当阈值确定以后,当误差大于此值时,用模糊控制;当误差小于此值时,用PID控制。这样就能综合模糊控制和PID控制的优点。
模糊控制+PID控制是一种很好的控制算法,它结合了两种相对来说都比较简单的算法,算法的关键是选择一个恰当的阈值,而这个阈值的选择也不是盲目的,它肯定是在模糊控制的ZO这个语言区间内,而具体的值需要在具体的这样系统中经过多次仿真得到,所以控制算法的关键是确定一个阈值。
3 模糊控制器的设计
在Matlab中要建立模糊控制器需要在模糊逻辑工具箱里设计。模糊逻辑工具箱是基于Matlab的数字处理环境下的函数集成体。下面介绍怎样建立一个模糊控制器。
先在Matlab界面中输入命令行“fuzzy”,进入到模糊编辑器。然后根据上面对模糊控制器的定义,要建立的模糊控制器是一个双输入单输出的系统。设定了两个输入量,一个是waterinflow,一个是rate,分别代表流量误差及其变化率,输出output是改变阀门的开度大小,以控制流量输出的大小。
接下来设定模糊控制的规则首先对流量误差waterinflow进行分档,将waterinflow分成三档,分别为“low”、“okay”和“high” ,流量误差的变化率也分成三档,它们分别为“negative”、“none”和“positive”。对输出output进行五档分类,为“close_fast”、“close_low”、 “no_hang”、“open_low”和“open_fast”。当三个变量进行分档完毕后,其变化曲线分别进行处理,waterinflow和rate采用高斯函数表示法,而output则采用三角函数表示法。设定好以上各个参数后,在如图4的控制规则编辑界面中进行编辑。
4 模糊+PID双模控制仿真
在仿真时,设定一个阈值,在此仿真中设阈值为0.02。系统的切换是自动切换,系统一直在进行着误差的比对,所以它们之间是不存在控制的延时或跳变的,在Simulink环境下将系统的结构图描述出来,有几个比较特别的模块,一个是Abs模块,它表示的是取绝对值,也就是说误差不管是正是负,都是要在此处做绝对值处理。一个是Switch模块,它表示的就是一两个方向开关模块,是切换时进行判断用的,何时切换到模糊控制,何时切换到PID控制。另一个是Saturation模块,该模块是一个饱和模块,就是为了防止出现死区而加入到过程环节的。
将所用的各个模块连接在一起之后,就可以进行仿真了。仿真时间设为120s,仿真方式为normal。
其仿真结果如图5 所示:
图6是单独PID控制输出图,其中系统中KP=2,TI=0.09,TD=1.01。同样仿真时间设为120s,方式为normal。
5 结 语
通过分析图模糊PID自动调节系统控制效果很好,用数字化的形式来对这个控制系统做一个评价,分别从稳态误差和调节时间来进行比较,其中PID控制的稳态误差6%,调节时间25s,模糊控制的问题误差为1.3%,调节时间18.5s,模糊+PID控制的稳态误差为0,调节时间16.3s,通过上述数据可以得出,模糊+PID控制算法在稳态误差精度高,调节时间快,具有一定的实用性。
