海洋航行器能源供给现状及发展趋势
2020-10-23王建新赵江滨贾玉山范梦雨
王建新,赵江滨,贾玉山 ,魏 渊,范梦雨
(1.武汉理工大学 能源与动力工程学院,湖北 武汉 430063;2.国家水运安全工程技术研究中心可靠性工程研究所,湖北 武汉 430063)
海洋航行器主要用来代替人力完成各种海洋环境下的不同任务。海洋航行器种类繁多,主要包括水下遥控航行器(ROV)、自治水下航行器(AUV)、自治水面航行器(ASV)及水下滑翔机(AUG)等。海洋航行器因其自主性高、环境适用性强、风险低、隐蔽性好等特点而成为世界各国研究的重点。
海洋航行器技术较为成熟,但电力供应问题一直是其发展所面临的困难。其中动力电源的优劣是决定海洋航行器续航力的关键。近年来,人们一直致力于海洋航行器环境能供电的研究,除了这些海洋环境能之外还有电池供能,具体的能源供给分类如图1所示。环境能储量丰富,可源源不断地就地获取并使之转换为可利用的电能,以太阳能无人船、波浪滑翔机、无人帆船、温差能滑翔机最具代表性,但这些设备对能量捕获要求较高;使用电池方便快捷,但容量有限,无法长时间持续地为航行器供电。风能、太阳能、海洋能中的波浪能和温差能以及电池是当前海洋航行器主要的供电来源。

图1 航行器能源供给类型
1 风力发电
美国某公司制造的海洋风力机器人C-Enduro,见图2,其长4.2 m、宽2.4 m、高2.8 m(包括天线),空载时质量为350 kg,满载时质量为450 kg,由功率为3.2 kW的柴油发电机、功率为1.2 kW的太阳能电池板(12块)、4.4 kW·h的锂电池以及功率为720 W的三叶风力发电机配合供电,以2个无刷电机带动螺旋桨作为电力推进,实现了风能、光能互补,续航时间可达3个月以上。

图2 海洋风力机器人C-Enduro
但该结构的缺点是:海洋风力风向多变,在某些风向下,三叶风力发电机叶片反而会成为航行阻力,且该风力机器人所配备的水平轴风力发电机对启动风速有较高的要求。
2 太阳能发电
以太阳能供能的海洋航行器较为成功的是SAUV[1]系列。SAUV-I实物图见图3,由充电控制器(1个)、太阳能阵列(1个)、镍镉电池堆(1个)以及微处理器(1个)组成其电力供应系统。SAUV-II[2]航行器以1 m2的太阳能电池板和32 V、2 kW·h的锂离子电池动力系统作为其电力供应系统,与SAUV-I相比,SAUV-Ⅱ能够捕获更多的太阳能,续航时间更长。

图3 SAUV-I实物图
理想状态下,以太阳能为供电物质的航行器可源源不断地获取电力支持,但也面临着一系列的难题:①影响太阳能辐射强度的因素太多,如气候、地域、时间以及季节,这些都对太阳能的捕获有着重要影响;②太阳能在向电能转化的过程中,耗损率太大,在实验中可达75%~80%,在实际应用中耗损更大,可达88%~90%;③太阳能电池板占用空间大,不符合小型海洋航行器轻便、灵活的要求;④容易腐蚀。
3 海洋波浪能发电
海洋航行器波浪能发电是为解决电池供电的海洋航行器续航时间短的问题而提出的一种方案,该方案在传统的海洋航行器基础上加装波浪能捕获装置、波浪能转换装置以及发电机等来实现波浪能向电能的转化。
模块化滑翔机如图4所示,该方案由意大利比萨大学提出,与传统的滑翔机不同,其可以利用波浪能进行发电。该航行器中安装了1台发电机,发电机通过活动关节和舱段外部2个翼连接。该航行器在海洋中有3种供能模式,如图5所示,分别是波浪充电器供能、滑翔机供能,以及水下机器人供能。充电时,滑翔机上浮,翼在波浪力的作用下,上下浮动,带动活动关节转动,进而带动无刷发电机转动,产生电能。在水中滑翔时,活动关节固定,翼也保持固定,2个固定翼为滑翔机提供前进方向的动力。该航行器有以下优点:①翼结构是一大特色,为后续小型海洋航行器的研究提供了一定的借鉴;②模块化的设计使用起来更为方便,也使以后技术升级的操作更为简单;③在滑翔机返回水面通讯的同时进行发电,减少其返回水面次数,降低了损耗。

图4 模块化滑翔机

图5 航行器的3种供能模式
赵江滨等提出了一种振动波浪能发电方案,在航行器外部两侧加装摆动水翼装置,通过传动轴与机体连接。在上下起伏的波浪力作用下,两水翼上下摆动捕获波浪能,波浪能通过航行器内部增速、传动及换向机构转换为高速的机械能,机械能通过发电机转换为电能。而且,该装置借鉴了飞机的机翼设计,在水翼上加装襟翼装置,可直接利用部分波浪力为航行器提供一定的动力。该装置力求为海洋航行器提供可持续的电力,实现水面或者近水面取能、全水深航行的作业目标。加装摆翼的航行器如图6所示。

图6 加装摆翼的航行器
4 海洋温差能发电
在深海中,不同深度温差巨大,尤其在热带和亚热带海域,浅水海域与深水海域温差可达20 ℃,这种温度梯度即温差能,温差能是由于太阳辐射不均产生的,也是太阳能的一种,但比其它太阳能稳定,并且不受季节和时间的限制。温差能发电装置也可以与滑翔机相结合,著名的有Slocum航行器[3],见图7。国内温差能发电的实例有天津大学研发的海洋温差能水下航行器。美国斯克里普斯海洋科研所研制了一款通过温差热机发电的航行器SOLO-TREC[4],其发电原理是通过固—液相变材料体积的变化驱动液体流动,液体推动活塞进而带动发电机转动进行发电,为航行器供电。其缺点为:受当地气候条件影响较大,适用范围主要分布在赤道附近的热带、亚热带海域,其他海域达不到航行器温差能发电需要的温度梯度。

图7 Slocum航行器
5 电池供电
电池一直以来都是海洋航行器重要的能源供给组成部分,对于它的选择,首先要考虑的便是能量密度和体积比能,除此之外,还要考虑充放电寿命、自放电率、污染等因素。
1)传统海洋航行器能源。常见的几种海洋航行器电池性能指标如表1所示。
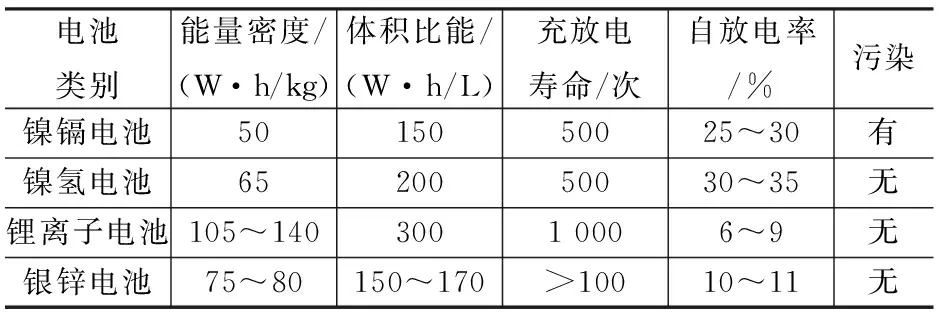
表1 电池及其性能指标
铅酸电池(传统电池)制作工艺简单,价格低廉,但比能量低,使用寿命短。较铅酸电池,镍镉电池能提供较大的能源密度,放电曲线较为平坦,但在充放电过程需要注意,否则会出现“记忆效应”,而且一旦发生泄漏,会污染环境,应用典例有美国的OTTER MBARI[5]。镍氢电池记忆效应较镍镉电池小,但在充放电寿命、体积比能、能量密度和自放电率方面较锂离子电池没有优势。银锌电池能量密度大,可以大电流放电、耐震,优于铅酸、镍镉、镍氢电池的能量密度和循环寿命,美国的Odyssey II MIT等AUV曾经使用过银锌电池,但使用寿命太短。
2)锂系列电池。锂电池可分为一次锂电池和二次锂电池,广泛应用于海洋航行器的主要是二次锂电池中的锂离子电池和聚合物锂离子电池。一次锂电池应用典型有美国的海底滑行者和远程水雷侦查系统等。锂离子电池广泛引用于各种型号的海洋航行器。锂离子电池应用实例有加拿大的VEXPLORER5000[6]、美国的REMUS-600[7]和REMUS-6000[8]、挪威的“休金”MRS[9]和法国的Alistar 3000[10]等。锂离子电池容量大、体积小、重量轻、比能量高、自放电率低、单体电压高、循环寿命长。聚合物锂离子电池以凝胶聚合物为电解质,此电解质具有离子导电性兼具隔膜作用。聚合物锂离子电池比能量高、循环寿命长、安全可靠、容量损失少、体积利用率高。应用典例有英国的AUTOSUB 6000、美国的Bluefin-12D[11]和Bluefin-21[12]、德国的“海懒”MKII等。锂电池供电的航行器应用情况如表2所示。

表2 锂电池供电的航行器应用情况
3)燃料电池和半燃料电池。燃料电池利用氧化还原反应完成燃料和氧化剂中化学能到电能的转化,是一种电化学装置。只要从外界不断获取燃料和氧化剂,就能持续发电。
燃料电池应用到航行器的实例有美军在1996年提出的“乌贼”。[13]该航行器采用高能量密度的燃料电池作为电源,无需充电,生成物主要是水,运行平稳无污染,具有效率高、噪声小、质量小等优点。
近年来出现了一种新型的化学能源——半燃料电池,它以镁、铝等金属作燃料,过氧化氢或海水中溶解氧作氧化剂,具有比能量高、放电电压稳定、存储寿命长、使用安全、无生态污染以及机械充电时间短等突出优点。对比燃料电池,半燃料电池实用价值更高。此类电池比功率达50~200 W/kg,比能量为440 W·h/kg,是铅酸电池的10~15倍,是银锌电池的3~4倍。此种半燃料电池价格低廉,性能稳定,维修及更换便捷,是目前较为理想的海洋航行器动力电池。燃料电池和半燃料电池应用情况见表3。较为典型的利用半燃料电池的海洋航行器有日本的Urashima无人潜器[14],如图8所示。

图8 Urashima无人潜器

表3 燃料电池和半燃料电池应用情况
6 结束语
目前来说,可以对海洋航行器进行电力供应的主要为两大块,一是可以就地取材进行发电的太阳能、风能和海洋能等环境能,二是电池。就环境能供电来说,目前主要集中在太阳能、风能、波浪能和温差能等方面。目前对于太阳能、风能和波浪能的利用,主要是通过在水面发电实现的,温差能的利用主要集中在水下滑翔机。海洋航行器可以同时利用几种环境能进行能源供给,例如对于利用风能的海洋航行器可以同时利用太阳能电池板辅助发电。选择哪种环境能作为发电原材料还是以用电需求以及科学载荷为依据。因此,在未来,海洋航行器对环境能源的收集利用将是同一种环境能源的多种方式相结合或者多种环境能源的综合利用。在将来,海洋航行器的能源收集与利用技术还需要在小型高效发电技术、高效储能技术、高性能固—液相变材料、能量收集系统与航行器本体的一体化融合、能量收集装置工程化技术研究、环境能源的新型收集方式、潜在可利用环境能源开发、多种能量技术的系统集成优化、智能化的能源管理系统、高度集成的海上专用能源补充装置等方面取得突破。
在电池的选择上,现在大多数航行器都使用可充电电池(锂离子电池、聚合物锂离子电池、镍氢电池),并配有相应的电池管理系统。有些小型海洋航行器使用续航里程较大的一次锂电池,但无法充放电,废弃电池还会污染环境;有些大型航行器配备铝氧半燃料电池,但维护成本高。当前,应用在中小型航行器上最多的是可充电锂离子电池和聚合物锂离子电池,而燃料电池由于其技术不够成熟、平台安全性有待加强等问题而仅在有限的大型航行器上应用。在未来,海洋航行器电池将朝着电池动力系统与超级电容相结合的方向发展。