坐标变换下磁悬浮轴承位置检测误差的形成机理与修正
2020-10-23董家伟王宁经
程 鑫,吴 惠,董家伟,王宁经
(1.武汉理工大学 机电工程学院,湖北 武汉 430070;2.湖北省磁悬浮轴承工程技术研究中心,湖北 武汉 430070)
磁悬浮轴承依靠可控电磁力将转子悬浮在设定位置,具有无机械接触、无摩擦、无磨损等优点,是机床主轴、磁悬浮多电发动机等关键装备中高性能转子系统的理想支承方式[1-3]。随着对装备可靠性要求的不断提高,磁悬浮轴承的可靠性问题成为了目前磁悬浮轴承技术的研究重点。
获取磁悬浮轴承的位移信息对提高磁悬浮轴承系统的稳定性至关重要。磁悬浮轴承系统多采用电涡流传感器,该类型的传感器利用电磁感应定律,将位移信号转换为感应电流的形式[4],从而检测出轴承的位移信号。但这类传感器实际工作时,受装配布局与采样电路的影响,会产生检测误差,直接影响了磁悬浮轴承系统的控制精度和可靠性。
位移传感器的安装角偏差及测量原点的偏移将直接影响位移测量精度,因此在系统工作前,需要对造成测量误差的因素进行标定,修正检测误差。但是由电路噪声等因素所造成传感器测量误差大多随机,无法标定。而现实中测量模型多为Gauss-Markov模型[5-6],如果系统矩阵呈现病态,即使只有很小的测量误差也会对结果产生重大影响,必须通过一系列方法降低其病态特性。文献[7]分析了大地测量系统中存在的不适定问题,并引入正则化解法。文献[8]针对传统测绘数据处理中矩阵求逆影响精度的问题提出了一种改进的主元加权迭代法来处理病态矩阵。文献[9]利用奇异值分解,给出了截取参数和修正奇异值的方法,减弱矩阵的病态特性。文献[10]分析了大地测量系统数据处理中的病态问题,提出了基于虚拟观测的总体最小二乘问题的岭估计法。
笔者构建了磁悬浮轴承位移检测系统的Gauss-Markov模型,剖析了其误差形成机理,罗列出可能影响精度的参数,并加以标定。在标定过程中遇到的病态问题,引入岭估计法与谱分解迭代法,降低了系统的病态特性。最后基于MATLAB建立数学模型并进行仿真,验证该方法是否能够达到修正误差的目的。
1 误差形成机理
1.1 理论检测模型
磁悬浮轴承位置检测如图1所示,通过磁极P1,P2,P3,P4的共同作用,使得轴承在特定的范围内运转,并通过位移传感器S1,S2测量轴承的实际位移,在二维平面中,两个线性无关的向量即可表示该平面内的所有向量。因此,两个垂直的位移传感器便可测量出轴承的位移向量。在其中OXY构成轴承实际位移坐标系RA,OX′Y′构成位移传感器的检测坐标系RB,X′轴相对X轴偏转-45°,Y′轴相对X轴偏转45°。

图1 磁悬浮轴承位置检测模型
定义RA中的向量Pa=(x,y)T表示轴承在水平方向与竖直方向的位移;向量Pb=(h,v)T表示位移传感器在检测坐标系RB中检测的位移向量;两个坐标系角度偏转矩阵T。根据坐标转换,Pa与Pb的对应关系:
(1)
向量L=(u1,u2)T分别表示2个位移传感器的测量值,Ks表示传感器增益,则存在等式:
(2)
结合式(1)和式(2),可推导出:
(3)
理论上,仅需解该线性方程组即可得出轴承的位移向量。
1.2 误差形式
系统的误差形式主要有两种表现形式,机械结构误差与测量误差。
(1)机械结构误差。实际磁悬浮轴承与位移传感器工作时,模型与图1存在出入。在位移传感器安装时,由于工件尺寸偏差与安装偏差等因素的存在,导致理想安装角度与实际安装角度不同,测量坐标系RB的X′轴与Y′轴与轴承位移坐标系RA的X轴的偏转角分别产生了α与β的偏差。在轴承制造时存在精度误差,加之定子与转子产生碰撞后产生形变,形状发生变化,轴承的质心发生偏移,导致轴承位移坐标系RA与测量坐标系RB的原点不重合。因此磁悬浮轴承位置检测的实际模型如图2所示。
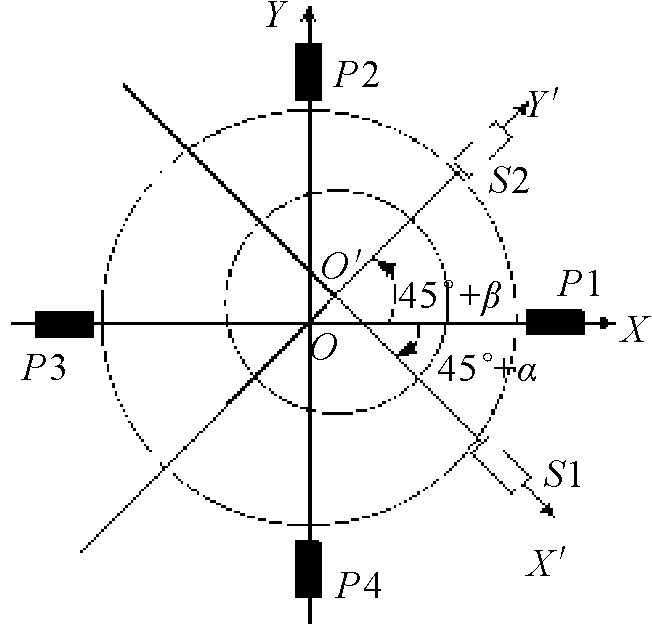
图2 磁悬浮轴承位置检测的实际模型
此时,两个坐标系的角度偏转矩阵为:

(4)
其中

(5)
根据矩阵相对变化的公式可知,定义两个坐标系的转换矩阵P,两个坐标系的变换具备以下表达式:
(6)
其中(δ1,δ2)分别表示轴承位移坐标系RA的原点O在测量坐标系RB中的坐标。
结合式(2)和式(3),可推导出:
(7)
(2)测量误差。传感器组测量值向量L=(u1,u2)T返回的是电压信号,电路中存在噪声,传感器采样时受采样精度影响,导致实际测量向量L表达式为:
L=LO+Δ
(8)
式中:LO为理论输出;Δ∈R2×1为测量值的系统误差。
2 误差修正
2.1 修正流程
测量误差与机械结构误差不同,工件一旦安装完成,机械结构误差就相对固定,而测量误差来源于电路与传感器,具有随机性,无法具体描述。对于机械结构误差,存在未知数p1,p2,p3,p4,δ1,δ2。可以通过测量已知实际位移的特殊点进行标定。当磁极P2通电,定子会被吸至最上方,获得竖直方向的最大位移,此时可得到一组数据。同理,调整不同磁极的通电可以获得多组数据。
定义第i个测试点Pi(xi,yi)T测试的传感器数据Li=(ui1,ui2)T,将式(7)变换形式得:
(9)
因此,要标定6个未知数,至少需要3的测试点。
定义:
(10)
则对于6个未知参量的标定,转换为求解线性方程组Ap=q。
2.2 病态问题
病态问题是指在求解线性方程组时,由于矩阵构造不合理,当某些数据发生轻微影响时,导致结果发生巨大变化,对应的矩阵成为病态矩阵。矩阵的病态特性取决于矩阵的条件数,条件数越大,病态特性越强。由于测量误差的存在,实际的数学模型为:
Ap=qo+Δ
(11)
式中:Δ为测量误差,E(Δ)=0,D(Δ)=P。当A矩阵为病态矩阵时,若采用传统的最小二乘法求解,由于Δ的存在而会导致结果出现较大偏差。为了提高精度,必须降低由于Δ而造成的影响。常见的方法有岭估计法与谱分解法[7,11]。
(1)岭估计法。岭估计法是一种用于线性数据分析的有偏估计回归方法,实质上是一种改良的最小二乘估计法。其表达式为:
(12)

由于岭参数的引入,岭估计法一定程度上改变了原等式的等量关系,仅仅只能作为估计结果。估计结果与岭参数k相关,不同的岭参数会导致不同的偏差。对于岭参数的选择存在很多种方法,这里应用GCV(generalized cross validation)法[12]。
应用GCV法选择岭参数,构建k的GCV函数为:
(13)
式中:H(k)=A(APTA-kI)-1ATP;n为未知数的个数;I为单位矩阵;tr(*)为矩阵的迹;‖*‖为矩阵的范数。式(13)的最小值k便是GCV法所确定的岭参数。
(2)谱分解迭代法。谱分解迭代法是将最小二乘法的两边同时加上p得到
(14)
将式(14)运用迭代的方式求解,其迭代公式为:
(15)
文献[13]证明了当i→∞时,等式收敛于方程的解。通过迭代的方式即可求解原线性方程,与岭估计方法相对比,谱分解迭代法避免了岭参数的选择,也没有改变原等式的等量关系,具备无偏性。
3 仿真分析
基于MATLAB建立仿真系统来模拟位移测量系统,在未修正误差及进行修正误差时测量到的轴承位移的误差情况如图3所示。实际测量模型为式(7),其中传感器增益Ks=1 000 mV/mm,轴承的位移半径为8 mm两个传感器与理论方向的偏差分别为α=3°与β=-2°。位移坐标系RA的原点O与测量坐标系RB的原点O′的位置偏差δ1=1 mm,δ2=0.5 mm,则根据式(9)得出,p=(0.743-0.669 8,0.669,0.682,1,-0.5)T,测量误差期望为0 mV,误差范围为[-2,2]mV均匀分布的信号,故噪声信号方差为1.33,P=1.33I。仿真时间为5 s,采样频率为10 Hz。
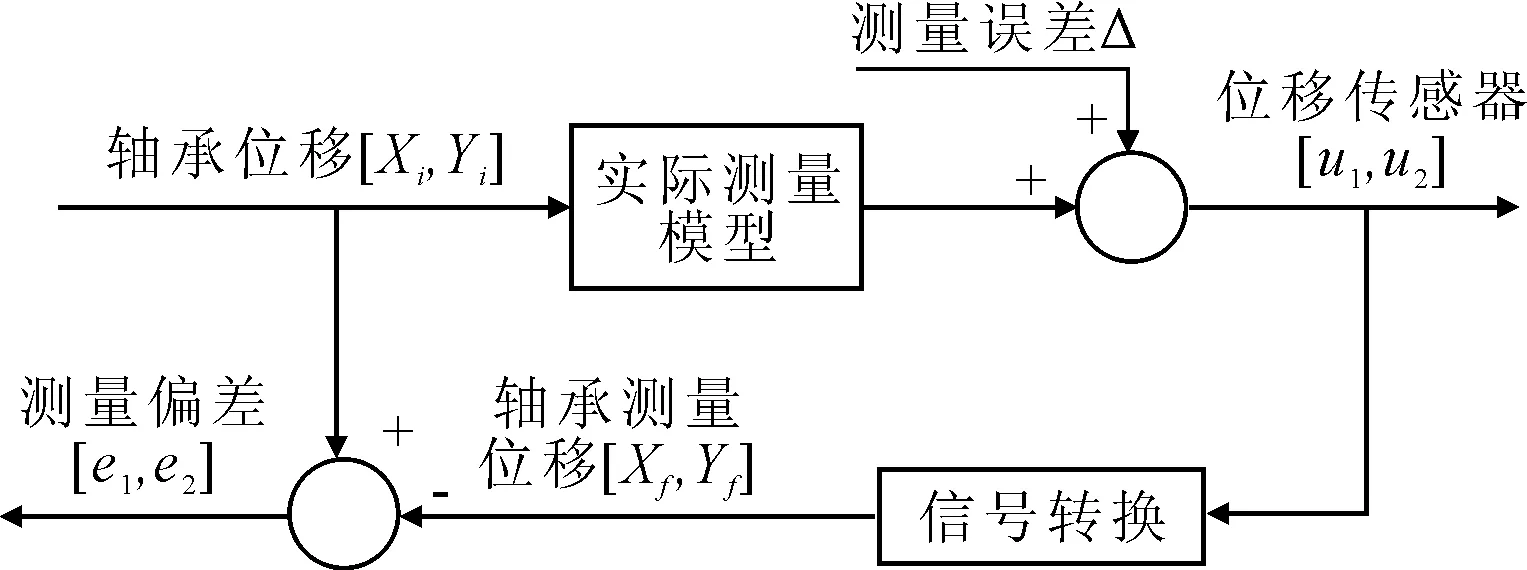
图3 测量系统模型
3.1 未知参量的标定
对于未知参量p,选用3个测量点,分别取轴承最上方的最大位移(0,8),最右方的最大位移点(0,8)以及45°方向的最大位移点(5.66,5.66)。以式(9)的方式确立方程,此时,采用最小二乘法求解方程,方程矩阵的条件数Cond(ATA)=1 556。条件数偏大,矩阵方程成病态。
以最小二乘法求解方程计算得到p=(0.753,-0.66,0.679,0.689,0.912,-0.576)。
(1)岭估计法。先行确定岭参数k,利用式(13)计算合适的岭参数,计算得k=100。代入式(11),计算得到p=(0.742,-0.670,0.669,0.682,1.008,-0.498)T。
(2)谱分解迭代法。利用最小二乘法确定迭代的初值,取迭代次数i=100;代入式(14),得p=(0.744,-0.669,0.667,0.680,0.997,-0.481)T。
由计算结果可知,经过修正后的结果比直接使用最小二乘法的结果的偏差小了很多。
3.2 测量偏差分析
对于测量偏差,选择几个位移点,并计算测量偏差[e1,e2]。具体流程如下:
(1)选择某个点(x,y),根据实际测量模型,用式(7)推导出传感器的测量值(u1,u2);
(2)根据传感器的测量值(u1,u2),分别以理论测量模型与修正过的测量模型反向求出轴承的位移;
(3)将测量出的位移与实际位移相比较,求出测量偏差[e1,e2],比较修正结果是否能够达到减少误差的目的;
(4)反复采样,直到仿真时间结束。
选定第一个位移点(5,0),此时水平位移量与竖直位移量的偏差如图4和图5所示。
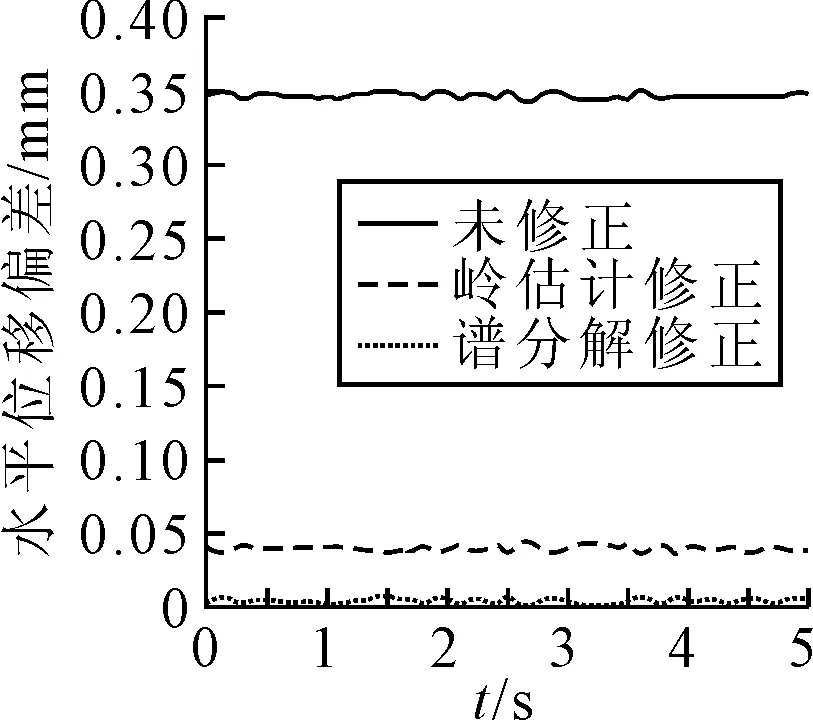
图4 水平位移量偏差

图5 竖直位移量偏差
轴承运转时会受到外部扰动,其位移特性经常为周期变换的简谐运动。因此第二个位移点不再是定点,而是一个周期性变换的位移点。其水平位移是幅值为5 mm,周期为1 s的正弦信号,即x=5sin(2πt),竖直位移为3 mm,此时水平位移量与竖直位移量的偏差如图6和图7所示。

图6 水平位移量偏差

图7 竖直位移量偏差
由图4~图7可知,在未经过误差修正时,由于各种传感器的偏转角与原点偏差的存在,位移测量偏差都比较大。经过误差修正后,位移偏差明显降低。在标定未知参量时,岭估计法虽然选用合适的岭参数,但还是改变了原等式的等量关系。相比岭估计法,谱分解迭代法所标定的结果更接近实际值。尽管如此,两种方法都降低了位移测量偏差,达到了降低误差的目的。
4 结论
笔者构造了磁悬浮轴承位移测量模型,分析了其误差成因并标定了影响测量误差的参数,对于方程矩阵的病态问题,运用合理的数学方法来提高运算结果的精度,并运用MATLAB进行仿真。根据仿真结果可知,笔者提出的磁悬浮轴承的位移测量误差的修正方法具有一定的可行性。