UWB定位摄影测树仪设计与试验
2020-10-23赵自雨冯仲科刘金成
赵自雨,冯仲科,田 艺,刘金成
UWB定位摄影测树仪设计与试验
赵自雨1,冯仲科1※,田 艺1,刘金成2
(1. 北京林业大学精准林业北京市重点实验室,北京 100083; 2. 西北农林科技大学资源环境学院,杨凌 712100)
为了实现森林样地高效、精准测定,该研究研制了一种具有实时定位功能和林分摄影测量功能的超宽带(Ultra Wide Band, UWB)定位摄影测树仪,该仪器主要由姿态传感器、UWB定位模块、CCD镜头和固定杆组成,以UWB定位技术和摄影测量理论为基础,结合到达时间差(Time Difference of Arrival, TDOA)定位算法、三边定位算法、运动恢复结构(Structure From Motion, SFM)点云匹配算法实现摄影测树仪的林下精准定位、影像获取以及林木坐标测量、胸径测量功能。为了验证仪器的林分参数提取准确性,选择4种不同林种的人工林进行试验。根据摄影测量影像特征点的匹配特点,设计“环绕拍摄”样地观测方法,利用Pix4D软件对拍摄的影像和点位坐标进行三维点云构建,利用LiDAR360对重建后的三维点云进行去噪处理、胸径和立木位置提取。结果表明,所设计的仪器能够快速获取样地影像和影像坐标信息,胸径测量值的偏差为-0.04~0.42 cm,均方根误差为0.26~0.51 cm;立木位置测量值偏差为-0.16~0.27 cm,均方根误差为0.23~0.34 m。胸径测量精度能够满足森林资源调查的精度要求,可进一步推广应用于森林资源调查。
林业;测量;设计;摄影测量;UWB;多边形样地;三维点云
0 引 言
森林生态系统是全球陆表生态系统的重要组成部分,对保持陆表生态系统和整个生物圈的稳定具有至关重要的作用[1]。由于森林面积庞大和林木结构复杂多样,实际森林调查工作中,通常并不是对整个森林进行调查,而是通过建立典型的固定样地采用抽样调查测量的方式,推算森林的林分结构和林木生长规律[2-3]。森林样地中立木胸径和树高以及位置分布是研究森林生态、森林结构和林区管理的重要指标[4]。样地调查中,如何快速、便捷、精准地实现林分参数测量是森林调查中的关键[5-6]。
传统的森林资源调查通常用罗盘仪测角测定固定样地4个角点方向和用皮尺或测绳测量固定样地对角线水平距,既费时又费力[7]。随着现代测量技术的发展,电子经纬仪[8]、全站仪[9]、GPS[10]等逐渐应用到森林样地测量工作中[11]。闫飞[12]进行了测树全站仪在林分样地的试验,实现了立木三维坐标测量。樊仲谋等[13]利用双目相机为测量工具,在样地中心放置双目相机,依次进行12次30°的旋转拍摄,获取12组立体像对,通过立体像对前方交会为内业方法,实现了胸径、树心坐标提取。虽然这些设备能够实现林分参数的测量,但是这些调查方法不能满足三维化和精细化调查的需求。近年来,刘金成等[14]提出利用CCD超站仪依“仿航线法”观测方法对林分进行观测,实现了样地范围、胸径和树高的提取,但是CCD超站仪在林下工作时更换测站位置的效率比较低。Liu等[15]以摄影测量和全球导航卫星系统空间定位技术为基础,研制了一种实时动态双目立体摄影测树仪,实现了林分参数测量,但是有冠层遮挡情况下GPS信号容易受到干扰,致使定位精度较差而影响测量的效率和精度。近年来,激光雷达技术在林业上得到了广泛的应用,并逐渐成为森林资源调查的新兴方法[16-21]。肖杨等[22]从三维激光扫描的点云数据中提取了多株树木的胸径和位置。Li等[23]利用汽车搭载三维激光扫描和GPS获取道路两侧的树木点云数据,能够高效提取树木坐标和树干信息等,但由于林区地形地势条件等限制了其在林区的应用。这些调查方法和仪器虽然在森林样地布设和观测中发挥了重要的作用,但是,现有林业调查设备仍存在很多不足:传统设备不能实现林分三维测量,并且精度低;三维激光扫描仪有较高的测量精度,但是仪器成本高[24];无人机摄影测量森林资源调查,不能实现林下参数的测量。
综上所述,为了满足数字化林业建设和森林资源调查的需求,本文以测量学、测树学、超宽带[25-26](Ultra Wide Band,UWB)定位技术和摄影测量为基础,基于到达时间差(time difference of Arrival, TDOA)算法[27],设计了一种UWB摄影测树仪,实现胸径、林木位置和样地范围提取。
1 UWB摄影测树仪构成
1.1 硬件构成
UWB摄影测树仪由UWB定位模块、CCD镜头模块、控制台(便携式平板电脑)、锂电池、便携式三角脚架、固定镜头花杆等部件组成,其整体框架如图1所示。其中,UWB定位模块为主要功能模块,通过超宽带无线电波实现基准站和移动标签之间的信息传输;数据存储模块用于存储影像和记录摄影站位置信息,实现影像和位置信息实时存储。CCD镜头、UWB定位模块和姿态传感器模块之间的相对位置需要保持一定的不变关系,初次使用时需要检核和校正3个模块间的位置参数并确定相对位移量。

图1 UWB摄影测树仪硬件组成及试验样机
UWB定位模块采用单片机为主控芯片,主要电路包括DW1000芯片、LED指示模块、复位电路等。该模块既可以作为基准站,也可以作为移动标签,通过控制台的指令进行切换。工作时1个UWB模块作为UWB摄影测树仪的定位标签,为UWB摄影测树仪提供位置信息,4个UWB定位模块作为基站为标签模块提供位置参考。影像获取模块的CCD镜头(PixPro SL25,伊士曼)为定焦光学镜头,具有WiFi和NFC功能,电池为LB-052型88 mAh锂电池,续航时间为2.5 h,用于获取样地林木影像信息,并将照片传输到控制台模块,用于恢复样地林木三维点云。控制台模块选用Intel赛扬N3450处理器,屏幕为12.3in多点式触摸屏以及10000mAh聚合物锂电池集成,其中,CPU为1.1GHz核心频率,四核,RAM内存为8GB,用于实时解算坐标位置信息、储存影像、记录姿态信息和显示移动标签位置信息。
1.2 软件设计
软件部分主要包括控制台上位机编程设计,软件采用嵌入式系统和C/S系统开发框架,利用C++编程实现,共设计4个模块,分别为UWB调试模块、姿态记录模块、坐标记录模块和CCD相机控制模块。图2为UWB摄影测树仪工作流程图,进行林分测量时,首先对基站坐标进行标定,为提高定位精度使基站所处位置尽可能处在同一平面;然后是控制台和CCD相机通过WiFi建立连接实现数据传输与交换;最后实现影像数据和标签坐标数据的实时记录、数据的导出与存储。内业利用Pix4D软件(Bentley公司)和LiDAR360软件批量处理和计算林分参数。

图2 UWB摄影测树仪工作流程图
1.3 功能参数
UWB摄影测树仪主要利用UWB定位技术、双边测距原理、上位机设计原理、单片机原理及C++编程、SfM视觉算法[28]、影像处理技术等,实现林下实时相对定位和影像获取,同时实现样地内林分的三维可视化、立木胸径估计和立木位置提取。
每个UWB模块质量为33.3 g,长Í宽Í高为29 mmÍ60.3 mmÍ9 mm;天线质量为8.72 g,天线长为85.5 mm,直径为9.3 mm,发射增益可调范围为0~33.5 dB,空旷环境下通信距离为500 m,定位精度±5 cm,工作温度为−20~85 ℃,可持续工作8 h;CCD镜头有效像素为1 635万,最大分辨率为4 608像素Í3 456像素。
2 摄影测树仪工作原理与方法
2.1 UWB定位原理
超宽带(Ultra Wide Band, UWB)是一种无载波通信技术,利用纳秒至微秒级的非正弦波窄脉冲传输数据,真空中的传播速度与光速相同。UWB定位原理类似于卫星导航定位系统,其中UWB基站相当于天上的卫星,移动标签相当于用户端的GNSS接收机,控制台相当于地面的监控站。UWB技术常被应用于通信与定位领域,尤其是当GNSS(当前4个GNSS系统为GPS、BDS、Glonass、Galileo)信号覆盖不到的场合。如图3所示,基站作为参考位置点,通常放置在样地四周,标签作为待测位置,和CCD镜头一起固定于花杆上。通过测量标签到达基站的时间差(Time Difference of Arrival, TDOA),乘以电磁波传播速度,可以得到标签和基站之间距离。利用标签到基站距离和基站坐标,可以列出多组球面方程,进而由数学方法求解出标签的坐标。假设标签的坐标为(,,),4个基站的位置为(1,1,1)、(2,2,2)、(3,3,3)和(4,4,4),根据TDOA测距算法,可以得到




注:1,2,3,4为基站位置;1,2,3,4分别为基站到各标签距离,m;▲为UWB标签位置。
Note:1,2,3and4represents the position of each anchors;1,2,3,and4represents the distance between UWB tag and anchors, m; ▲ represent the position of UWB tag.
图3 UWB定位原理示意图
Fig.3 Schematic diagram of UWB positioning principle
依据式(1)~(4)计算出标签坐标(,,)的值,写成矩阵形式为

式中(,,)为标签坐标,(x,y,z)为基站坐标,d为基站到移动标签的距离,m;=1,2,3,4。
由式(5)可知,标签坐标(,,)的值是一个逆矩阵和3个基站坐标相乘的结果,本文采用4个基站坐标,采用最小二乘法运算可得到精确的标签位置坐标。
2.2 UWB基站布设原则
根据UWB定位原理,UWB摄影测树仪工作之前,需要分别将4个基站放置在待观测样地周围2~5 m处,放置时尽量保持基站成正方形形状,基站位置布设示意如图4所示,坐标系中原点为基站1的位置,轴为从基站1到基站4的连线方向,基站1、2、3、4的坐标可通过公式(6)计算得到。仪器工作时各个模块之间自动连接,控制台软件部分支持一键标定所有基站(需要注意的是,4个UWB基站需要放置在同一高度的三脚架上),通过点击控制台界面中的【坐标测量】按钮,可以看到基站的坐标位置图标逐渐收敛固定,当UWB基站标定成功后,系统自动退出UWB基站一键标定模式,标定时间小于1 min,系统设置结束后可以进行下一步测量工作。
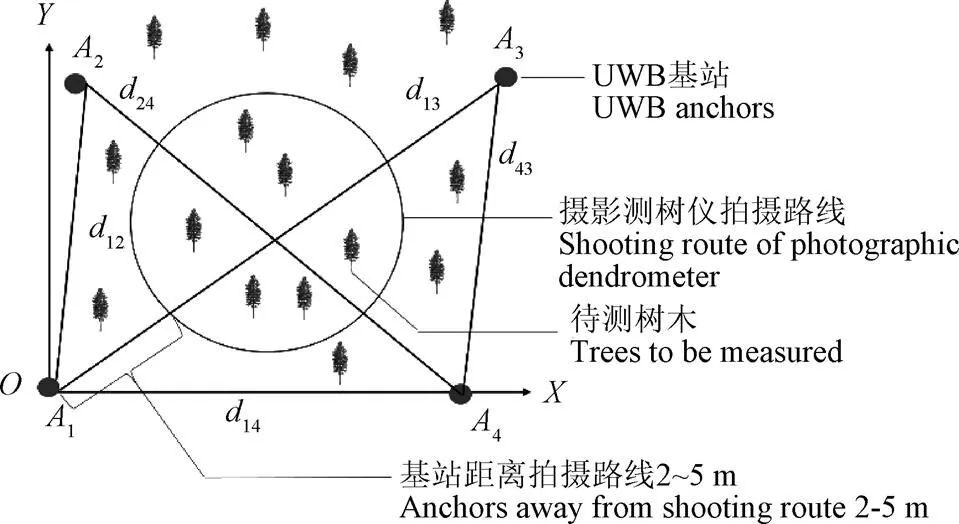
注:dij为各个基站之间的距离,m,i, j=1, 2, 3, 4。

式中(x,y)为基站坐标,=1,2,3,4。
2.3 多边形微样地观测原理
根据森林调查的需求,通常森林样地的形状有方形、圆形(角规样地)和多边形微样地[29-30]。本文针对多边形微样地调查,设计了一种多边形微样地“环绕拍摄法”林分观测模式,以实现立木胸径、立木位置计算,摄影测量方法如图5所示,具体步骤如下:
1)选定待测多边形样地,应用控制台自动标定基站位置,4个UWB基站之间距离应大于多边形样地边长。
2)基站与移动标签匹配完成后,首先将标签放置在样地中心位置并测量样地中心坐标,然后再将标签放置在距样地中心最远立木位置,测量标签位置坐标,控制台自动显示虚拟观测路线和间隔1m的摄影测站位置。
3)依据控制台显示的拍摄路线和摄影测站位置,选定摄影起始测站,按照控制台显示方向利用UWB摄影测树仪进行正直摄影。
4)利用控制台控制摄影模块和坐标定位模块实现影像拍摄和记录摄影测站坐标。其中,拍摄的每张影像与坐标信息一一对应。
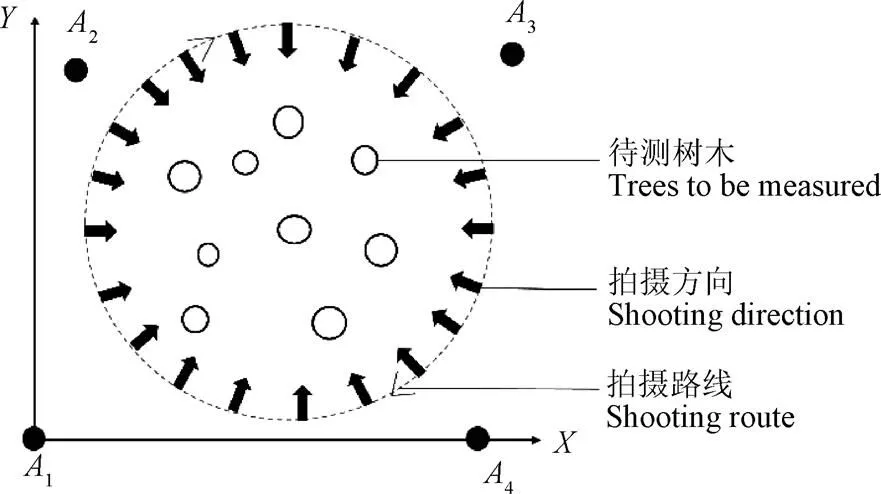
图5 UWB摄影测树仪多边形样地观测示意图
3 试验结果与分析
3.1 精度评价方法
为了验证UWB摄影测树仪多边形样地观测的各项精度,2019年9月在北京市西山试验林场(39°58′22″N,116°12′14″ E)选取油松成熟林、蒙古栎中龄林、栾树幼龄林和柳树中龄林4个观测条件较好面积约为50 m2(半径约为3.99 m)的多边形待测样地,4个样地中立木棵数依次为6、6、5、5。用胸径尺量取样地每棵立木胸径,并以此以作为胸径标准值;以全站仪测量立木位置为标准值与UWB摄影测树仪提取的立木位置进行比较。使用偏差(Bias)、均方根误差(Root Mean Squared Error,RMSE)对观测值进行评估,其计算公式为
式中x为测量值,x为标准值,为样地中立木数量,Bias为测量值偏差,cm;RMSE为测量值均方根误差,cm。
3.2 林分3D点云构建
按照2.3节中的观测方法,利用UWB摄影测树仪对多边形微样地进行观测,拍摄的影像、摄影测站坐标和相机姿态数据均分别存储到电脑中。
影像获取后,利用商业软件Pix4D mapper分别对4个试验样地的影像、摄影测站坐标和姿态数据进行处理。林分点云构建过程中,使用运动恢复结构算法(Structure-From-Motion,SfM)从影像中提取特征点,首先使用2张图像进行重建,计算出影像中相同特征点,然后通过局部迭代光束法优化新增的影像的位置和姿态,最后进行整体光束法平差实现林分影像的无缝拼接。为保证生成的3D点云效果和精度,摄影测量时保持70%~80%的相片重叠率。4个样地中获取的影像数量、软件处理时间以及点云密度如表1所示。试验数据处理使用电脑配置为CPU i7-8750H、显卡1660Ti、内存容量16 G。

表1 影像处理的参数
3.3 胸径测量结果分析
为了验证UWB摄影测树仪提取林分参数的精度,将Pix4D mapper生成的点云数据导入到LiDAR360中,首先对点云进行归一化处理,然后进行单木分割,最后基于单木分割后的点云数据提取树干位置和批量提取胸径,提取胸径时选择地面点以上1.25~1.35 m区间的所有点,进一步通过拟合圆[31]的方式进行树干胸径提取,结果如表2所示。结果表明,胸径点云测量值和标准值基本保持一致,胸径测量值的Bias的变化范围为−0.04~0.42 cm,RMSE的变化范围为0.26~0.51 cm。Lu等[32]利用背包式LiDAR胸径测量值的RMSE为1.02 cm;Zhou等[33]利用手持式LiDAR测量胸径的RMSE为0.7 cm;Roberts等[34]利用地面摄影方式测量行道树胸径测的RMSE为1.24~2.81 cm;文献[35-37]用类似方法测量胸径的RMSE取值范围为0.77~5.0 cm。与已有研究的胸径测量结果比较,胸径测量值的RMSE值低于已有研究结果的0.44~4.49 cm,摄影测树仪的胸径测量精度较高。

表2 立木胸径测量结果
3.4 立木位置估计结果分析
为了验证立木相对位置的准确性,以全站仪测量结果为标准值与UWB摄影测树仪提取的立木位置进行比较,4个多边形样地的立木相对位置如图6所示,结果如表3所示。

注:圆圈代表立木所在位置;虚线为拍摄路径。
从表3中可以看出Bias的变化范围为−0.16~0.27 m,RMSE的变化范围为0.23~0.34 m,立木位置提取值与标准值相近,提取精度较高。与GPS定位设备林中定位比较,该摄影测树仪因UWB定位基站和标签均安置于冠层以下,UWB信号传输不受林冠层影响,能保持优良定位精度,同时通过提取立木位置可以为掌握林分结构提供依据。

表3 立木位置提取结果
摄影测树仪成本约为0.4万元,手持式三维激光扫描仪的价格约为3万元;使用摄影测树仪观测1个多边形微样地约需要10 min,手持式三维激光扫描仪约为3 min;摄影测树仪和手持式三维激光扫描仪的质量分别为3.5和3 kg,仪器质量相当。虽然摄影测树仪样地调查的效率略低于手持式三维激光扫描仪,但是价格具有足够优势。
4 结 论
本研究利用UWB定位技术和摄影测量技术,设计了一种UWB定位摄影测树仪,提出了一种“环绕拍摄法”的多边形样地观测方法,实现了林下实时定位、相机姿态记录、多边形微样地3D点云构建、胸径和立木位置的提取功能。经验证,胸径测量值的偏差变化范围为−0.04~0.42 cm,均方根误差的变化范围为0.26~0.51 cm。立木位置提取值的偏差变化范围为−0.16~0.27 m,均方根误差的变化范围为0.23~0.34 m,立木位置提取值与标准值相近,提取精度较高。该仪器可较好地应用到多边形森林样地观测工作当中,能够满足森林资源连续清查的精度要求,可以进一步推广应用到森林资源调查中。
研究中还存在不足和待改进的地方,摄影测量时容易受到逆光和强光照情况的干扰;另外,在灌草覆盖度较高和树木侧枝较多的样地中,例如侧柏林,由于侧枝和灌木遮挡,影响了测量精度和效率。在后续的研究中,将通过增加CCD镜头的数量和改变CCD镜头的拍摄方向,实现多镜头和多角度的立体摄影,提高测量的精度和林分3D点云构建效果。
[1]Trumbore Susan, Brando Paulo, Hartmann Henrik. Forest health and global change[J]. Science, 2015, 349(6250): 814-818.
[2]孟宪宇. 测树学[M]. 北京:中国林业出版社,1996.
[3]亢新刚. 森林经理学[M]. 北京:中国林业出版社,2011.
[4]Macdicken Kenneth G. Global forest resources assessment 2015: what, why and how?[J]. Forest Ecology & Management, 2015, 352: 3-8.
[5]吕康梅,张一鸣,于涛. 北京市森林资源固定样地调查体系研究[J]. 林业资源管理,2009(2):43-48.
Lv Kangmei, Zhang Yiming, Yu Tao. Study on beijing forest fixed sample plot investigation system[J]. Forest Resources Management, 2009(2): 43-48. (in Chinese with English abstract)
[6]冯仲科,殷嘉俭,贾建华,等. 数字近景摄影测量用于森林固定样地测树的研究[J]. 北京林业大学学报,2001,23(5):15-18.
Feng Zhongke, Yin Jiajian, Jia Jianhua, et al. Forest measurement in fixed sample plot by digital close-range photogrammetric survey[J]. Journal of Beijing Forestry University, 2001, 23(5): 15-18. (in Chinese with English abstract)
[7]Gillis M D, Omule A Y, T Brierley. Monitoring canada’s forests: the national forest inventory[J]. Forestry Chronic, 2005, 81(2): 214-221.
[8]侯鑫新. 基于CCD和经纬仪的林木图像识别系统研究[D]. 北京:北京林业大学,2014.
Hou Xinxin. Study on Image Recognition System Based on the Tree Images Taken by a CCD Camera Mounted on a Theodolite[D]. Beijing: Beijing Forestry University, 2014. (in Chinese with English abstract)
[9]刘金成,黄晓东,杨立岩,等. 基于CCD超站仪的森林样地建立与精测方法研究[J]. 农业机械学报,2016,47(11):316-321.
Liu Jincheng, Huang Xiaodong, Yang Liyan, et al. Establishment and precise measurement of forest sample plotbased on CCD super station[J]. Transactions of the chinese society for agricultural machinery, 2016, 47(11): 316-321. (in Chinese with English abstract)
[10]Korpilo Silviya, Virtanen Tarmo, Lehvävirta Susanna. Smartphone GPS tracking-inexpensive and efficient data collection on recreational movement[J]. Landscape & Urban Planning, 2017, 157: 608-617.
[11]冯仲科. 精准林业[M]. 北京:中国林业出版社,2002.
[12]闫飞. 森林资源调查技术与方法研究[D]. 北京:北京林业大学,2014.
Yan Fei. Research of Technology and Methord of Forest Resource Inventory[D]. Beijing: Beijing Forestry University, 2014. (in Chinese with English abstract)
[13]樊仲谋,冯仲科,李亚东,等. 基于双目相机的森林样地调查方法研究[J]. 农业机械学报,2015,46(5):293-299.
Fan Zhongmou, Feng Zhongke, Li Yadong, et al. Investigation method of forestry plot based on binocular stereo camera[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(5): 293-299. (in Chinese with English abstract)
[14]刘金成,冯仲科,杨立岩,等. 实时动态多功能双目立体摄影测树仪设计[J]. 农业工程学报,2018,34(22):61-68.
Liu Jincheng, Feng Zhongke, Yang Liyan, et al. Design of real-time kinematic multi-functional binocular stereo- photogrammetric dendrometer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(22): 61-68. (in Chinese with English abstract)
[15]Liu Jincheng, Feng Zhongke, Yang Liyan, et al. Extraction of sample plot parameters from 3D point cloud reconstruction based on combined RTK and CCD continuous photography[J]. Remote Sensing, 2018, 10(8): 1299-1320.
[16]Zhou Sanzhang, Kang Feng, Li Wenbin, et al. Extracting diameter at breast height with a handheld mobile LiDAR system in an outdoor environment[J]. Sensors, 2019, 19(14): 3212-3227.
[17]Brede Benjamin, Calders Kim, Lau Alvaro, et al. Non-destructive tree volume estimation through quantitative structure modelling: Comparing UAV laser scanning with terrestrial LiDAR[J]. Remote Sensing of Environment, 2019, 233: 111355-111369.
[18]Chen Shilin, Feng Zhongke, Chen Panpan, et al. Nondestructive estimation of the above-ground biomass of multiple tree species in boreal forests of china using terrestrial laser scanning [J]. Forests, 2019, 10(11): 936-961.
[19]Fan Yongxiang, Feng Zhongke, Chen Panpan, et al. Estimating tree position, diameter at breast height, and tree height in real-time using a mobile phone with RGB-D SLAM [J]. Remote Sensing, 2018, 10(11): 1845-1863.
[20]Qiu Zixuan, Feng Zhongke, Jiang Junzhiwei, et al. Application of a continuous terrestrial photogrammetric measurement system for plot monitoring in the beijing songshan national nature reserve[J]. Remote Sensing, 2018, 10(7): 1080-1104.
[21]Hauglin Marius, Astrup Rasmus, Gobakken Terje, et al. Estimating single-tree branch biomass of norway spruce with terrestrial laser scanning using voxel-based and crown dimension features[J]. Scandinavian Journal of Forest Research, 2018, 28(5): 456-469.
[22]肖杨,胡少兴,肖深,等. 从三维激光点云中快速统计树木信息的方法[J]. 中国激光,2018,45(5):266-272.
Xiao Yang, Hu Shaoxing, Xiao Shen, et al. A fast statistical method of tree information from 3D laser point clouds[J]. Chinese Journal of Lasers, 2018, 45(5): 266-272. (in Chinese with English abstract)
[23]Li You. A dual growing method for the automatic extraction of individual trees from mobile laser scanning data[J]. Isprs Journal of Photogrammetry & Remote Sensing, 2016, 120(8): 37-52.
[24]冯仲科,黄晓东,刘芳. 森林调查装备与信息化技术发展分析[J]. 农业机械学报,2015,46(9):257-265.
Feng Zhongke, Huang Xiaodong, Liu Fang. Forest survey equipment and development of information technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(9): 257-265. (in Chinese with English abstract)
[25]Monica Stefania, Bergenti Federico. Hybrid indoor localization using WiFi and UWB technologies[J]. Electronics, 2019, 8(3): 334-347.
[26]Tiemann Janis, Schweikowski Florian, Wietfeld Christian. Design of an UWB indoor-positioning system for UAV navigation in GNSS-denied environments[C]//2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), 2015.
[27]Sun Linhao, Fang Luming, Weng Yuhui, et al. An integrated method for coding trees, measuring tree diameter, and estimating tree positions[J]. Sensors, 2019, 20(1): 144-162.
[28]Cipolla Roberto. Segmentation and recognition using structure from motion point clouds[C]//European Conference on Computer Vision, 2008.
[29]孙梦莹,冯仲科,李蕴雅. 九棵树法提取林分调查因子原理与应用[J]. 中南林业科技大学学报,2017,37(4):70-74.
Sun Mengying, Feng Zhongke, Li Yunya. Principle and application of forest investigation factor by nine-tree method[J]. Journal of Central South University of Forestry & Technology, 2017, 37(4): 70-74. (in Chinese with English abstract)
[30]郑怀兵,冯仲科. 基于多边形法的森林资源调查监测[J]. 东北林业大学学报,2014,42(7):161-165.
Zheng Huaibing, Feng Zhongke. Investigation and monitoring of forest resources based on polygonal sample plot method[J]. Journal of Northeast Forestry University, 2014, 42(7): 161-165. (in Chinese with English abstract)
[31]韩雪梅. 基于3D激光扫描的林木树干重建及特征提取技术研究[D]. 北京:北京林业大学,2019.
Han Xuemei. Research on Tree Trunk Reconstruction andCharacteristic Extraction Based on 3D Laser Scanning [D]. Beijing: Beijing Forestry University, 2019. (in Chinese with English abstract)
[32]Lu Jinbo, Wang Hong, Qin Shuhong, et al. Estimation of aboveground biomass of Robinia pseudoacacia forest in the Yellow River Delta based on UAV and backpack LiDAR point clouds[J]. International Journal of Applied Earth Observation and Geoinformation, 2020: 86(12): 303-315.
[33]Zhou Sanzhang, Kang Feng, Li Wenbin, et al. Extracting diameter at breast height with a handheld mobile LiDAR system in an outdoor environment[J]. Sensors, 2019, 19(14): 3212-3227.
[34]Roberts J, Koeser A, Abd-Elrahman A, et al. Mobile terrestrial photogrammetry for street tree mapping and measurements[J]. Forests, 2019, 10(8): 701-716.
[35]Wu Xinmei, Zhou Sunyin, Xu Aijun, et al. Passive measurement method of tree diameter at breast height using a smartphone[J], Computers and Electronics in Agriculture, 2019, 163: 1-11.
[36]Aguilar F J, Nemmaoui A, Peñalver A. Developing allometric equations for teak plantations located in the coastal region of ecuador from terrestrial laser scanning data[J]. Forests, 2019, 10(12): 1050-1071.
[37]Piermattei L, Karel W, Wang D, et al. Terrestrial structure from motion photogrammetry for deriving forest inventory. Data[J]. Remote Sensing, 2019, 11(8): 950-972.
Design and test of photographic dendrometer based on Ultra Wide Band(UWB) positioning
Zhao Ziyu1, Feng Zhongke1※, Tian Yi1, Liu Jincheng2
(1.,,100083,; 2.,,712100,)
Estimation of trees position and Diameter at Breast Height (DBH) is an important part of forest resources inventory. This study aimed to design a multi-functional, high-precision, real-time positioning tree-measuring device that integrates plot setting, DBH measurement, and tree position measurement based on the Ultra Wide Band(UWB) positioning principle, sensor technology, image processing technology, trigonometric functions and tree surveying theories. The main hardwares component of the equipment included CCD (Charge Coupled Device) image acquisition module, antenna, three-axis gyroscope module, three-axis accelerometer module and console module, the auxiliary components included fixed cloud platform and lithium battery. The software was developed by a modular structure compiled in android windows development environment based on the C++ language. According to the matching characteristics of the photogrammetric image feature points, the "surround shooting" sample plot observation method was proposed. The pix4D commercial software was used to established the three-dimensional point cloud model of the trees, and the LiDAR360 software was used to denoise the reconstructed 3D point cloud, extract the DBH and the position of the trees. In order to verify the accuracy of stand parameter extraction, the device was tested in four plots, that was,,andrespectively. The results showed that the designed photographic dendrometer could be used to obtain the image of the trees and coordinate information in image quickly, the deviation and RMSE (Root Mean Squared Error) of the DBH were -0.04-0.42 cm and 0.26-0.51 cm, and that of the position were -0.16-0.27 m and 0.23-0.34 m, respectively, the measuring precision conformed to the requirements of forestry investigation. The study can provide a reference for the forest survey.
forestry; measurements; design; photogrammetry; Ultra Wide Band(UWB); polygonal plot; 3D point cloud
赵自雨,冯仲科,田艺,等. UWB定位摄影测树仪设计与试验[J]. 农业工程学报,2020,36(17):167-173.doi:10.11975/j.issn.1002-6819.2020.17.020 http://www.tcsae.org
Zhao Ziyu, Feng Zhongke, Tian Yi, et al. Design and test of photographic dendrometer based on Ultra Wide Band(UWB) positioning[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(17): 167-173. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.17.020 http://www.tcsae.org
2020-04-21
2020-08-31
国家自然科学基金项目(U1710123)
赵自雨,博士生,研究方向:摄影测量、林业装备与信息化研究。Email:zhaozy0315@126.com
冯仲科,博士,教授,博士生导师,主要从事精准林业、测绘与3S技术集成研究。Email:zhongkefeng@bjfu.edu.cn
10.11975/j.issn.1002-6819.2020.17.020
S758.7
A
1002-6819(2020)-17-0167-07