基于地磁的滚转弹滚转信息测量方法研究
2020-10-22张小宇刘宁苏中卫炳乾管雪元
张小宇 刘宁 苏中 卫炳乾 管雪元


摘 要: 针对滚转弹需要实时滚转信息进行指令控制,传统滚转角测量方法标定复杂且难以实时有效获取的难题,提出利用双轴标量地磁信息进行滚转信息解算。在研究滚转弹运动特性的基础上,确定滚转弹滚转信息解算坐标系;对固连弹体的双轴地磁传感器输出的标量地磁信息进行数据[min?max]标准化,归一与零位消除,并搭建半实物算法仿真平台。经仿真与实验结果验证,所提方法能够真实反映滚转弹飞行过程的滾转变化,响应快、误差小,且满足对滚转弹实时指令控制需要。
关键词: 滚转信息测量; 滚转弹; 标量地磁信息; 地磁传感器; 半实物仿真; 实验验证
中图分类号: TN753.4?34 文献标识码: A 文章编号: 1004?373X(2020)20?0009?05
Geomagnetism?based measurement method of rolling information of rolling missile
ZHANG Xiaoyu1, LIU Ning1,2, SU Zhong1,2, WEI Bingqian1, GUAN Xueyuan3
(1. Beijing Key Laboratory of High Dynamic Navigation Technology, Beijing Information Technology University, Beijing 100101, China;
2. Key Laboratory of Modern Measurement and Control, Ministry of Education, Beijing 100101, China;
3. Key Laboratory of Ballistics, Nanjing University of Science and Technology, Nanjing 210094, China)
Abstract: As the rolling missile needs the real?time rolling information to perform the instruction control, but the traditional rolling angle measurement method has complex calibration and is difficult to get it effectively in real time, the rolling information calculation utilizing the biaxial scaled geomagnetic information is proposed. On the basis of studying the motion features of the rolling missile, the rolling information of the rolling missile is determined to calculate the coordinate systems. The data min?max standardization, normalization and null elimination of the scalar geomagnetic information outputted by the biaxial geomagnetic sensor of the fixed missile body are conducted, and the simulation platform of semi?physical algorithm is built. The results of simulation and experiment resurts verification show that the proposed method can truly reflect the rolling change of the rolling missile during its flight process, has fast response and small error, and can meet the needs of real?time instruction control of the rolling missile.
Keywords: rolling information measurement; rolling missile; scalar geomagnetic information; geomagnetic sensor; semi?physical simulation; experimental verification
0 引 言
快速高精度测量滚转角是实现精确制导的必要条件,对弹道修正及相关项目技术的研究起着非常重要的作用[1?2]。当前国内外对飞行体滚转角测量的方法种类繁多,各具特色,主流采用的测量方法有陀螺仪测量、加速度计测量、GPS测量、利用太阳方位角测量、星敏感器测量、GPS测量以及地磁测量等[3?4]。陀螺仪测量法中,陀螺仪不能承受较大的过载,而且高速旋转的飞行体会给陀螺仪带来离心加速度从而引起附加测量误差[5?6];加速度计测量法,也叫无陀螺惯性测量,成本低、功耗小、可靠性高,但安装复杂、精度要求高、解算难度大[7];太阳方位角和星敏测量方法受天气状况影响大,局限性强;GPS虽然精度高、实时、准确,但抗干扰能力弱[8?9]。地磁场无源、稳定、覆盖面广、可靠性高,而且地磁测量传感器高灵敏度高、体积小、抗过载能力强、无时间积累误差 [10?11]。
本文使用地磁传感器采集飞行体地磁滚转信息,利用滚转平面内双标量轴的相位差关系,编写算法,解决了难以实时有效快速获取飞行体的滚转信息难题。
1 测姿条件与坐标系
1.1 测姿条件
地磁场是一个稳定的物理大磁场,它的强度和方向是位置的函数。地球周围空间内的任意一点都存在磁场,其强度与方向会随着经度、緯度以及高度的不同而改变。地磁场是弱磁场,在地面上的平均磁感应强度[12]约为0.5 Gs。地磁技术的广泛应用不仅依赖严谨的地磁模型和完备的理论支撑,还需要高精度测量装置。磁阻传感器是利用铁磁材料能发生磁阻的非均质现象制成,通电电流在垂直于它的磁场作用力下,磁阻会生改变,因其体积小、抗干扰强、成本低被大量应用在工程中[13]。由于地磁场相比较其他测量方式优势明显,结果更精确,故而地磁应用范围广泛。
1.2 坐标系
姿态测量和解算必须建立在一定的参考坐标系下,常用的坐标系有CGCS2000坐标系、地心惯性坐标系、地球坐标系、发射坐标系、地理坐标系、载体坐标系、导航坐标系等。
1) 载体坐标系
载体坐标系[O?xyz]以飞行体质量中心为原点,[Ox]轴指向载体纵轴方向,以前进方向为正;[Oy]轴与载体纵向截面垂直,指向载体右翼方向;[Oz]轴与[Ox,Oy]轴组成右手坐标系。
2) 地理坐标系
地理坐标系[O?x1y1z1]通常以地球表面一点为坐标原点,[Ox1]沿地球经度方向指北向;[Oy1]指向东向;[Oz1]沿地垂线方向指向地时,称为北东地坐标系,[Oz1]轴沿地垂线指向天时,称为东北天坐标系[14]。
2 滚转角解算原理
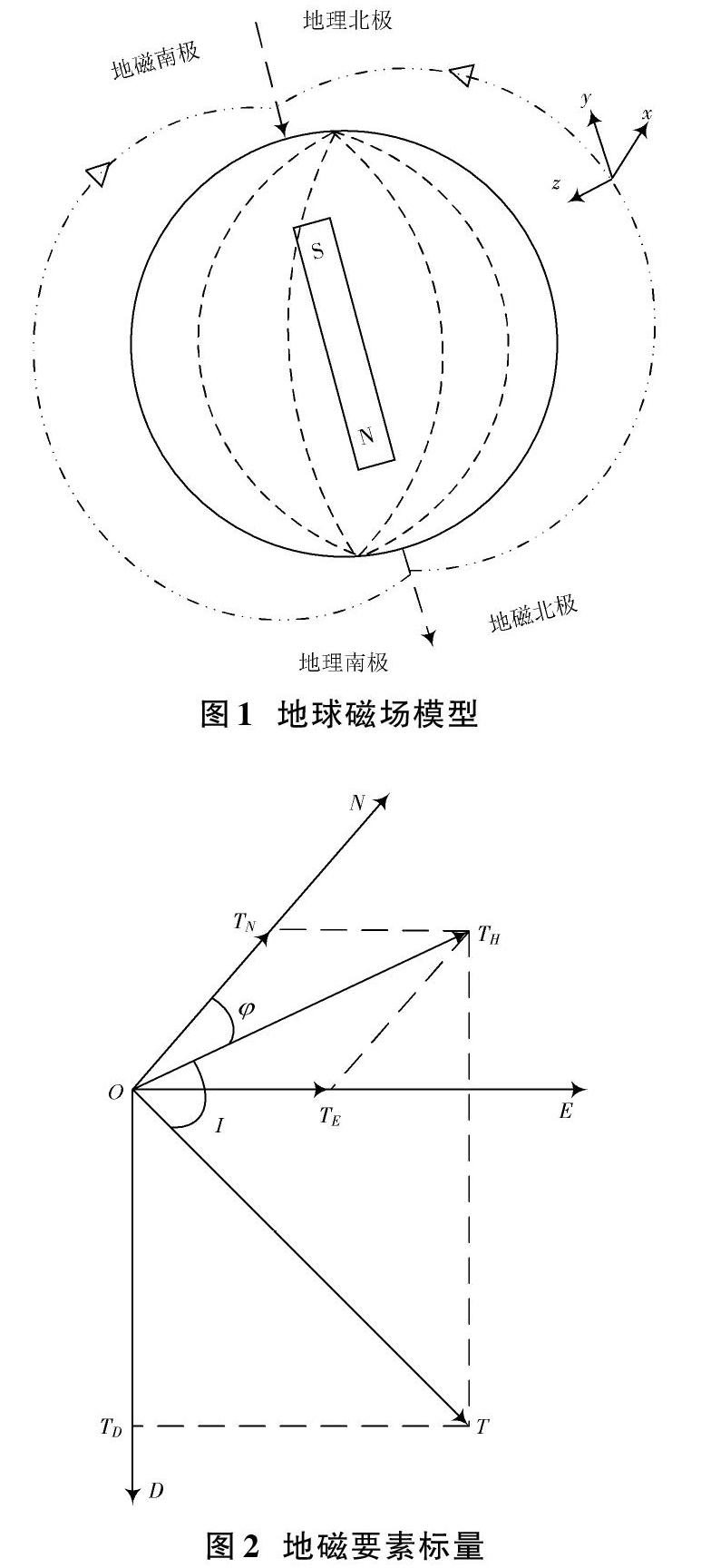
地球类似大型球状磁铁,周围遍布着庞大的磁场。目前地磁南北极正好与地理南北极相反,且2个轴向存在一个偏差角度——磁偏角。地磁场是地球丰富的自然资源,利用磁场的矢量特性和地磁场的长期稳定性,能够根据磁场信息快速定位空间位置[15]。为了便于描述磁场大小和方向,法拉第提出磁场线概念,地磁场空间描述如图1所示。
为了准确描述地球表面上一点的地磁场强度,需要明确坐标系并对磁场矢量分解。实验中采用北东地坐标系。某一点的地磁可以通过7个要素介绍[16],分别是地磁场总强度[T]、地磁场北向分量[TN]、地磁场东向分量[TE]、地磁场垂直分量[TD]、地磁场水平分量[TH]、磁偏角[φ]、磁倾角[I]。地磁各要素之间的关系如图2所示。
图中,[O?NED]为东北地坐标系,[ON],[OE],[OD]分别指向北向、东向、地心,[TH]为地球总的地磁场磁场强度[T]在水平面[ONE]上的投影,[TN,TE]分别是[TH]在地理北向与东向的投影,[TD]为地球总的地磁场磁场强度[T]在[OD]方向上的投影,磁偏角[φ]为地磁水平分量[TH]与地理北向的夹角,磁倾角[I]为地球磁场[T]与水平分量[TH]的夹角[17]。地磁7要素矢量关系为:
[TH=Tcos ITD=Tsin ITN=THcos φTE=THsin φT2H=T2E+T2NT2=T2D+T2H] (1)
坐标系确定后,地球附近空间任意一点的位置都能够通过地磁传感器获取的三维地磁信息[x,y,z]来表示。惯导元件与飞行体空间结构固定,[x]轴正方向与飞行正方向一致,[y,z]两轴与[x]轴垂直,且相差90°。在极短的时间内,可认为[x]轴正方向未发生变化,在飞行体前进运动时,在垂直于飞行正方向的平面内,[y,z]轴发生滚转运动。两轴在转动时切割磁感线,地磁传感器采集地磁信息,发现地磁信息的变化与滚转信息密切相关。
主值区间:反正切函数是多值函数。滚转1圈为2π,当1组标准正弦曲线与滞后[π2]的曲线作商,对应的反正切值分为[±π]两部分。正负由两簇曲线位置关系而定。
3 滚转角解算方法
载体与过载体纵轴平面的夹角被称为滚转角[γ]。从飞行体尾部顺纵轴看,飞行体由垂直平面向右滚转为正值,反之为负值。飞行过程中,在始终垂直于前进方向的平面上存在旋转运动,位于该平面上的2个相互垂直轴切割磁感线运动。以时间为横轴,传感器采集的地磁信息为纵轴,如图3所示。
由于原始地磁数据数字量级较大,并且2个地磁测量轴的数值存在较大差异,因此必须对数据校零和归一。数据处理方法流程见图4。
1) 确定数据区间,以发射到落地过程为研究对象。
2) 选择合适的方法找出极值。本文采用斜率检验确定极值,对区间内的所有数据点进行筛选,计算点前后20个点的斜率,斜率为正取1,斜率为负取-1。分别求出累加和,记作Sum1和Sum2。
[Sum1+Sum2=0,且Sum1>0, Sum2<0] (2)
则该点为极大值;反之为极小值。结果见图5。
3) 求地磁信息的平均值。计算相邻极大值和极小值间的平均值[E],均值与原值关系如图6所示。
[E=Fmax+Fmin2] (3)
4) 归一消零。由数学几何关系可得到:
[fi,2=bi,2-Ei,1mai,1-Ei,1] (4)
式中:[fi,2]为归一化后的新数据;[b(i,2)]为原始数据;[Ei,1]为步骤3)求得的均值,[mai,1]为极大值。
5) 同理处理z轴传感器信息。
6) 用式(7)计算y,z,记作[γm],作为飞行体安装标准和发射状态下的滚转信息。滚转角变化如图7所示。
[γm=arctanyz·180π] (5)
真实滚转角[γ]与[γm]存在如下关系:
[γ=γ0+γm] (6)
式中,[γ0]为滚转初值,由飞行初始状态确定,可通过标定参数获得。
4 实验仿真与验证
4.1 仿真分析
已知[y,z]轴在实际飞行体滚转过程中轨迹近似正弦曲线,并且2轴相互垂直,存在90°的相位差,故假设:
[y=sin(w·i-90°)z=sin(w·i)] (7)
仿真原始数据如图8所示。
如图9所示,解算出滚转角度在-180°~180°之间变化,与滚转信息一致。因此2个轴向地磁信息与滚转信息之间有联系,并且该变化能够快速测得,真实反映出飞行体滚转过程中的角度变化。
4.2 半实物平台验证
采用某型惯导设备数据采集实验验证算法。由于装置有限无法同时模拟弹体前进和滚转2个方向运动,实验重点放在旋转运动。
设备固连在转台上,选取起始位置作为所有试验的始出发点,如z轴最大值。第1组转台设置为位置启动,x轴正方向西,以不同速率重复实验;第2组恒定速率2 000 (°)/s启动,x轴正方向改变,并重复实验。实验结果如图10~图15所示。
图10、图11为位置转动2 520°、摆动角速率300(°)/s,避免正弦曲線过多,文中不便观察。
由图10、图12、图14可知,初始飞行正方向不同时,双轴初始标量地磁信息也不一样,图11、图13、图15解算出滚转信息表征不同的飞行方向。完整的滚转信息包括初始标定信息[γ0]和飞行滚转信息[γm]。地面确定x正方向后,地面标定获得初始信息,滚转弹飞行中便能快速得到真实滚转角。表1为不同高转速滚转65圈后的落点误差分析,可以看出算法受转动速率及转动周期影响小,误差低于1.2°,算法设计符合需求。
5 结 论
本文提出双轴标量地磁信息解算弹体滚转信息方法,在已知地面标定的滚转初值后,通过离散标准化能够实现实时快速解算弹体飞行滚转信息,仿真结果表明,所提算法测量精度高、响应速度快,为滚转指令控制提供研究方向。但实验中对设备前进时未加验证,即俯仰信息、偏航信息对滚转信息产生影响未加以分析验证,将成为今后研究的主要内容。
参考文献
[1] 闫爱天.基于地磁传感器与MEMS陀螺仪组合姿态测量技术研究[D].南京:南京理工大学,2016.
[2] 曹平军.基于地磁场的飞行体滚转角测量技术研究[D].北京:中国舰船研究院,2014.
[3] 郭艺进.基于磁阻传感器的旋转稳定弹滚转角测量[D].北京:北京理工大学,2015.
[4] 于勇吉,林春生,翟国君.一种新型弹体飞行姿态角解算方法[J].船电技术,2018,38(10):1?4.
[5] SHI Guoxing, YANG Shuxing, SU Zhong. A fast solution of roll angle based on single?axis MEMS gyro and geomagnetic information [C]// 2011 8th Asian Control Conference. Kaohsiung: IEEE, 2011: 147?155.
[6] 曹平军.基于地磁场的飞行体滚转角测量技术研究[D].北京:中国舰船研究院,2014.
[7] GROVES P D.GNSS与惯性及多传感器组合导航系统原理[M].北京:国防工业出版社,2011.
[8] VEL?K J, RIPKA P, KUB?K J, et al. AMR navigation systems and methods of their calibration [J]. Sensors & actuators: a physical, 2005, 123: 122?128.
[9] 龙达峰,孙俊丽,温晶晶.地磁辅助信息的旋转弹姿态估计方法[J].弹箭与制导学报,2018,38(4):6?10.
[10] 刘思,孙永荣,黄斌,等.一种改进的地磁匹配算法研究[J].现代电子技术,2012,35(2):62?64.
[11] 郭才发,胡正东,张士峰,等.地磁导航综述[J].宇航学报,2009,30(4):1314?1319.
[12] 李豫泽,石志勇,杨云涛,等.基于ICCP算法的地磁匹配定位方法[J].现代电子技术,2008,31(20):122?124.
[13] 曲磬.基于地磁测量的弹丸滚转角实时解算[D].南京:南京理工大学,2009.
[14] 李文胜.基于比值法的磁阻传感器炮弹姿态测量系统研究[D].南京:南京理工大学,2017.
[15] SUN Xiaojie, KOU Jun, ZHANG Xiaonan, et al. Geomagnetic navigation technical analysis [C]// Proceedings of 2016 China International Conference on Inertial Technology and Navigation. Beijing: CNKI, 2016: 453?458.
[16] 李冰,霍鹏飞,祁克玉.基于双轴磁强计及GPS的滚转角测量方法[J].现代电子技术,2012,35(11):58?60.
[17] 孙宁.利用磁阻传感器测量飞行体滚转角[D].南京:南京理工大学,2008.
