一种基于棘轮机构的铝合金吊钩的研制
2020-10-21董志聪陈佳健梁俊君许锐文黄润培
董志聪 陈佳健 梁俊君 许锐文 黄润培
摘 要:现有的机械吊钩设备多搭配棘轮机构使用,传统棘轮机构的运动平稳性较差,同时存在跳齿、结构复杂、缺乏稳定性等问题,基于此,本文介绍了一种基于棘轮机构的铝合金吊钩,该吊钩通过合理的结构设计消除了卡死机构和棘轮轮齿之间的间隙,能够有效防止跳齿事故的发生,运动平稳性良好。
關键词:铝合金吊钩;棘轮机构;卡死机构;安全系数
1 绪论
棘轮机构按结构形式分类可分为齿式棘轮机构和摩擦式棘轮机构,按啮合方式分类可分为外啮合棘轮机构和内啮合棘轮机构,按从动件运动形式分类可分单动式棘轮机构、双动式棘轮机构和双向式棘轮机构[1]。
现有的机械吊钩设备多搭配棘轮机构使用,棘轮机构是整个吊钩最核心、最关键的构件。棘轮机构通常由棘轮和棘爪组成,摇杆是棘轮机构的运动输入构件,棘轮为运动输出构件[2]。当摇杆逆时针摆动时,铰接在杆上的棘爪插入棘轮的齿内,使棘轮同时转过一定角度;当摇杆顺时针摆动时,棘爪在棘轮的齿上滑过,棘轮静止不动。这样,当摇杆作连续的往复摆动时,棘轮便得到单向的间歇转动。
2 一种基于棘轮机构的铝合金吊钩
2.1 传统装置存在的技术问题
棘轮机构的运动平稳性较差,存在跳齿问题。现有的机械吊钩设备多搭配棘轮机构使用,棘轮机构的稳定性对吊钩的工作效率、安全系数有很大影响。在实际使用中,当棘轮圈位于棘轮上侧时,棘轮圈在其重力的作用下沿着棘轮轴往下移动,棘轮圈的轮齿与棘轮的轮齿紧密啮合,棘轮轴能实现沿顺时针或逆时针方向转动,其反方向无法转动。然而,当棘轮圈位于棘轮下侧时,棘轮在其重力的作用下沿着棘轮轴往下移动,棘轮圈上的轮齿和棘轮的轮齿之间存在一定的间隙,导致出现跳齿现象,即棘轮轴能沿任意方向转动[3]。
棘轮机构结构复杂,操作不便捷:现有的棘轮机构以摇杆为动力输入件,棘轮为动力输出件,棘爪为制动元件,在使用时需要各个部件之间的配合,结构复杂。摇杆多通过齿轮啮合的方式对棘轮进行动力输入,在使用时又存在稳定性差的问题,容易出现卡齿、跳齿,增加了操作风险和难度。棘轮结构重量过大:由于现有棘轮结构需要依靠多个齿轮配合操作,这很容易导致棘轮机构的整体重量过大,尤其是对于高空作业,在使用时需要依靠多人共同操作,浪费了过多的人力。
2.2 装置结构
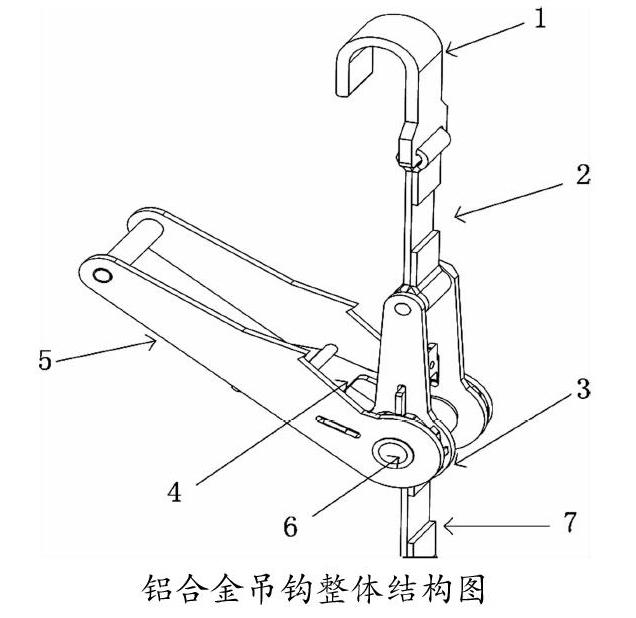
下图为本文提供的一种基于棘轮机构的铝合金吊钩,包括铝合金吊钩1、尼龙带2、棘轮3、卡死机构4、摇柄5、支撑轴6、尼龙带7。
在使用时用铝合金吊钩1钩住上端进行固定,用尼龙带7固定要提升的物品,拉出卡死机构4,在0至180度范围内逆时针转动摇柄5,实现对物品的提升;当将物品提升到指定位置后,松开卡死机构4,卡死机构4会插入支撑轴7两端的棘轮轮齿中,卡死机构和棘轮轮齿之间不存在间隙,能够很好的防止出现跳齿事故,运动平稳性良好。
工作人员在操作时可以同时手握棘轮机构的卡死机构4和摇柄5,能够很容易的对物品的升降进行控制;该吊钩采用两个棘轮3,这使得工作人员在操作时更省力,提升了工作效率;手握式的棘轮卡死控制机构,能防止跳齿事故的发生,提升设备的整体安全系数。该吊钩结构简单,没有过多的采用多齿轮的配合,仅采用棘轮机构、尼龙带、铝合金吊钩作为零部件,降低了整体重量,便于携带。
2.3 装置产生的技术效果
在使用时用铝合金吊钩钩住上部固定端,用下端尼龙带固定要提升的物品,拉出卡死机构,逆时针转动摇柄,实现对物品升降的控制;当将物品提升到指定位置后,松开卡死机构,将棘轮进行稳定卡死。卡死机构和棘轮轮齿之间不存在间隙,能够很好的防止出现跳齿事故,运动平稳性良好。
该吊钩结构简单,采用棘轮机构、尼龙带、铝合金吊钩作为零部件,降低了整体重量,便于携带,尤其对于在登高作业,可折叠放进工具袋单人随身携带,减轻了工作人员的工作负担,提高了工作效率,同时降低高空传递大工具的作业风险。
3 结语
本文对一种基于棘轮机构的铝合金吊钩的工作原理和研制方法做了阐述,该吊钩结构简单,只采用了棘轮机构、尼龙带、铝合金吊钩作为零部件,使得整体重量大大降低,而棘轮机构的卡死机构和棘轮轮齿之间不存在间隙,能够很好的防止出现跳齿事故,运动平稳性良好,同时提升了设备的整体安全系数和工作人员的工作效率。
参考文献:
[1]陈秋红,谢夏玲,梁祥金,郭晓萌.棘轮棘爪式自动抓梁的设计探讨[J].河南水利与南水北调,2015.08:44-45.
[2]常贵阳,郝晓峰,马丽,綦光和,任宝钢,徐洪涛.新型吊钩闭锁装置的设计[J].起重运输机械,2017.05:74-75.
[3]袭洪浪主编.数控加工工艺学[J].北京:科学出版社,2005,6.
基金项目:广东电网有限责任公司职工技术创新项目(032000KK52190009)
