链式橡胶切条机的设计
2020-10-21曹菲仇久安赵友俊石军键
曹菲 仇久安 赵友俊 石军键
摘要:针对橡胶在切割过程中容易发生变形而影响切割精度的问题,提出一种新的链式橡胶切条方法,设计了其三维模型,并对切割机构、推料机构、夹持机构、防倾倒机构进行功能结构分析。该链式橡胶切条机可连续自动实现推料、夹持、切割以及防倾倒的功能,满足在线生产定时、定量的供料需求,保证产品计量的精确控制,提高两倍以上的生产效率,最大限度地降低生产成本。
关键词:链式橡胶切条机;切割机构;推料机构;夹持机构;防倾倒机构
0 引言
橡胶是一种具有可逆形变的高弹性聚合物材料,在室温下富有弹性,在很小的外力作用下能产生较大形变,除去外力后能恢复原状。橡胶属于完全无定型聚合物,它的玻璃化转变温度低,分子量往往很大,大于几十万。在工业使用时,需要将大块的橡胶材料切割成实际需要的小体积橡胶。目前,生产需要的切条操作均由人工完成,劳动强度大、生产效率低;且由于橡胶极富弹性,在切割过程中容易发生变形而影响切割精度,不能够切割出满足实际要求的高质量产品。因此,为了保证橡胶的精确切割,提高切割效率及质量,需要研发一种新型的橡胶切条机。
国内外在切条机方面也有一些新的设计,如JIN[1]构建了一个测试装置来进行橡胶切割实验;赵振秀等[2]提出了一种基于PLC技术的数控切条机控制系统;任晓光[3]设计了一种新型垂直同步切条机,并研究了切割方向选择与钢丝绳切割的力学问题;赵婧[4]对橡胶切条机的带轮、刀具、齿轮、轴等相关系统进行了全面的设计。本文提出一种新的链式橡胶切条方法,并设计了其模型,可连续自动实现推料、夹持、切割以及防倾倒的功能,满足在线生产定时、定量的供料需求。
1 整体结构设计
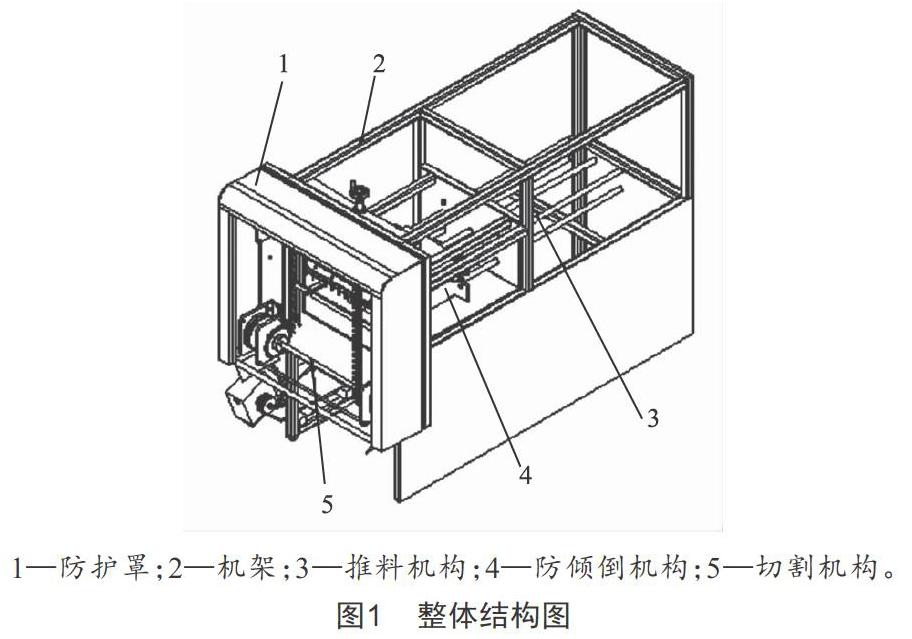
链式橡胶切条机整体结构如图1所示,主要由切割机构、推料机构、夹持机构和防倾倒机构等组成,可根据设定的长度(可调)自动完成对原材料的分割。与物料接触部件全部采用304不锈钢材料,钣金采用表面静电喷涂;电气系统采用7寸触摸屏,可以实现螺旋挤出无级变速设置、故障报警与检测、计数和预置控制、人机对话界面操作等。
链式橡胶切条机主要技术参数如下:外形尺寸(长、宽、高)为2 000 mm×1 000 mm×1 360 mm;其中进料口尺寸为740 mm×300 mm,裁切推料口尺寸为480 mm×300 mm。生产速度不大于5 min/每袋;切割截面积为20 mm×20 mm、20 mm×40 mm、40 mm×40 mm;切割长度为10~100 mm可调;外部气源压力不小于4 MPa(用于雾化和气动元件)。
2 主要机构
2.1 切割机构
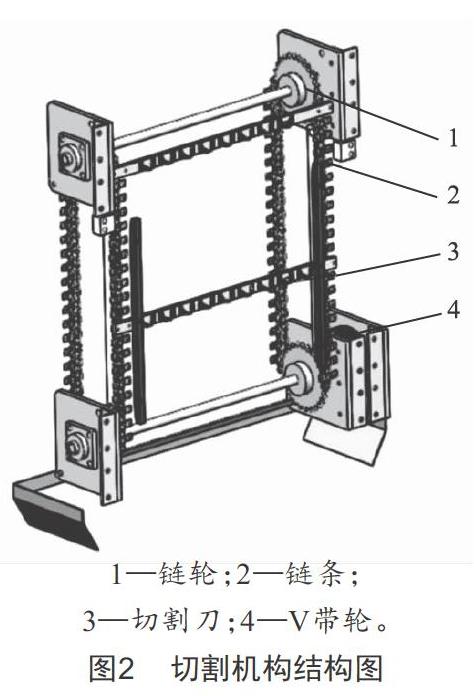
切割机构如图2所示,包括驱动减速电机、传动链轮和切割刀等。切割机构采用链条形式连续运行,链条上安装切割刀具,切割成品成条状。调节刀具排布密度及推料的进给速度可控制成品的切割尺寸。
切割刀为特制刀具,材质选用食品级不锈钢,成排排列,结构呈圆弧型。为方便切割过程中制品的顺利排出,对刀身部分做了切割处理,使得刀身部分与物料接触面积减小,避免了堵料、存料问题的发生。
2.2 推料機构和夹持机构
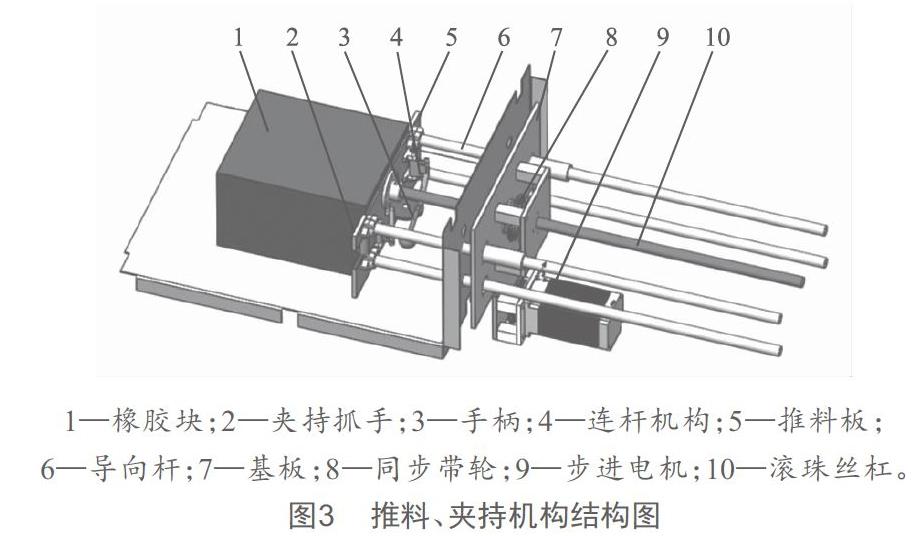
推料机构如图3所示,包括推料板、导向杆、滚珠丝杠和步进电机等。其工作原理为:直线轴承固定在基板上,并将四根导向杆的一侧同时固定在推料板上,使得推料板悬空,这是为了避免与底板产生摩擦,而增大运动的阻力。在步进电机的驱动下,带动同步带轮运转,由同步带的连接带动滚珠丝杠上的同步带轮转动,动力通过同步带轮传递给滚珠丝杠,使得滚珠丝杠转动,并且能够平稳地向前移动,然后推动推料板向前运动,从而推动物料向前移动。
推料机构的推料板上安装有物料夹持机构,用于夹持物料,作用是避免切割结束前物料有少量剩余时前倾翻倒,造成无法切割。如图3所示,夹持机构包括夹持抓手、连杆机构和手柄等。夹持机构需手动转动手柄,通过连杆机构使抓手旋转夹持物料。
2.3 防倾倒机构
出料口上方同时安装有防倾倒机构,如图4所示,包括调节手轮、物料限位板和挡料柱等,能够对待切割橡胶进行限位压紧,防止发生倾斜,当橡胶切割有少量剩余可能前倾时,挡料柱可挡住物料,避免前倾翻倒。
防倾倒机构通过调节手轮来调整上限位板的高度,能使物料顺利通过即可,出料口设置的挡料柱设计为针状,物料电机驱动推进过程中可顺利切透物料,不影响正常推料。
3 结语
橡胶是一种广泛应用的工业原料,但目前橡胶材料切割普遍使用人工操作,劳动强度大、生产效率低,尤其是精确控制添加量时,不能满足生产需要。为解决这个问题,设计了一种连续工作链式橡胶切条机,可以很好地满足在线生产定时、定量的供料需求,保证产品成分比例的精确控制,提高生产效率两倍以上,最大限度地降低生产成本。
[参考文献]
[1] JIN Y,WU J H,LIU L Q,et al.The Cutting Energy of Rubber Cutting by a Sharp Cutter[J].Key Engineering Materials,2007(4):3072-3075.
[2] 赵振秀,周建华,杭小宇.基于PLC的数控切条机控制系统[J].机电工程,2015,32(4):527-530.
[3] 任晓光.新型切条机的设计及关键构件分析[D].秦皇岛:燕山大学,2015.
[4] 赵婧.橡胶切条机的改进设计[J].橡塑技术与装备(橡胶),2020,46(1):37-45.
收稿日期:2020-05-18
作者简介:曹菲(1980—),女,山西人,副教授,研究方向:食品包装材料与技术、包装装备设计。
