智能机器人触觉传感专利技术综述
2020-10-21崔芳婷李欢欢
崔芳婷 李欢欢


摘要:触觉是机器人实现与外部环境直接作用的必须媒介。本文针对机器人触觉传感技术的全球专利申请概况、专利分布和重要申请人专利布局进行分析,梳理机器人触觉传感技术的发展脉络和趋势,指明了该领域的研究热点、重点,最后从现有技术角度分析未来技术的发展方向。
关键词:智能机器人;触觉;传感
中图分类号:TP24文献标识码:A 文章编号:1003-5168(2020)03-0140-07
1 概述
触觉是机器人获取环境信息的一种重要知觉形式,是机器人实现与环境直接作用的一种必要方式。与视觉不同,触觉本身有很强的敏感能力可直接测量对象和环境的多种性质特征。
触觉的主要任务是为获取对象与环境信息和为完成某种作业任务而对机器人与对象、环境相互作用时的一系列物理特征量(接触力的大小、柔软性、硬度、弹性、粗糙度、形状等)进行检测或传感。机器人触觉与视觉一样基本上是模拟人的感觉,广义的说它包括接触觉、压觉、力觉、滑觉、冷热觉等与接触有关的感觉,狭义的说它是机械手与对象接触面上的力感觉。机器人触觉传感器主要有检测和识别功能:检测功能包括对操作对象的状态、机械手与操作对象的接触状态、操作对象的物理性质进行检测;识别功能是在检测的基础上提取操作对象的形状、大小、刚度等特征,以进行分类和目标识别。
现今国内外关于机器人触觉传感的研究朝着大面积化、集成化、柔性化发展,具体体现在对于机器人触觉皮肤的研究愈来愈广泛深入。类似于人类皮肤,机器人皮肤不仅可以像人类皮肤那样传感外部环境信息,还可通过传感器实现信息的定量检测。而国内外机器人触觉系统则朝向多元化、智能化、拟人化方向发展,具体体现在机器人使用触觉进行类似于人的情感交互,如日本的“妻子”机器人,远程陪护等。
因此,本文针对国内外专利数据进行分析,寻找机器人触觉传感技术的发展脉络和专利布局情况,为机器人触觉交互技术领域提供技术发展方向和专利布局指导。
2 全球专利申请概况
2.1 数据来源及检索要素
本文采用中国专利文摘数据库(CNABS)、德温特世界专利索引数据库(DWPI)和世界专利文摘数据库(SIPOABS)。其中,CNABS用于中文专利检索;利用DWPI以及SIPOABS两者的结合完成英文库专利的检索。检索的截止日期为2019年06月31日。而部分发明专利申請存在公开的延时,由此导致部分的专利申请由于未公开而不在本次文献采集之列。接下来主要以关键词和分类号检索获得的2424篇专利申请为基础对专利申请进行分析。
2.2 全球专利申请量分析
最早的机器人传感技术出现自1974年,是由日立提出了一种自动焊接机器人,自动焊接机器人通过手臂上安装的触觉装置来感测工件的姿态。机器人的出现极大地提高了生产效率,因此,最早对于机器人传感技术的研究集中于工业机器人的触觉(力觉、滑动觉),用于为机器人提供触觉传感,辅助机器人完成工业任务。并且专利申请量在1983年达到一波小高峰。然而,受限于触觉传感器技术的发展,将触觉传感器应用于工业机器人的研究也在经历了80年代的小高峰后进入低迷时期,1990-2000年间,申请量均未超过20件。而在2000-2010年间,伴随着智能机器人相关技术的发展,使得触觉传感技术的年专利申请量迅速增长了3倍,进入快速增长阶段。而从2010年至今,触觉传感技术进入了急速增长阶段,伴随着智能机器人的广泛应用和精密加工技术的快速发展,各国各类企业开始在该领域开展研发并着手进行专利布局[1]。
由图1可以看出,智能机器人触觉传感技术中国专利申请量基本与全球申请量趋势保持一致,基本上保持逐步增长的态势,其中在2001年加入WTO之后开始快速增长,并且在2010年之后与全球申请量一样进入急速增长阶段。中国的智能机器人触觉传感技术专利申请相比于全球起步较晚,第一件专利申请出现在80年代,这主要是由于国内申请人技术起步较晚,并且早期国内机器人市场较小,国外申请人对中国市场不够重视。2005年之后,随着国内技术的发展和中国经济的增长,国内申请人的专利申请量开始快速增长,并在2011年超过了国外来华以及中国台湾中国香港申请人的申请量,而在2014年之后,国内申请人专利的申请量占据了绝对数量优势。
2.3 各国家/地区/组织专利申请分析
由图2可以看出,美国、中国、日本、欧洲、韩国关于智能机器人触觉传感技术的申请量位居前五位,其中美国、中国、日本的专利申请量占了总申请量的近60%。其中美国和中国并居第一,均占申请总量的28%;其次欧洲和日本的申请,分别占申请总量的16%和15%。可见,美国、中国和日本在智能机器人触觉传感领域投入的研究较多。
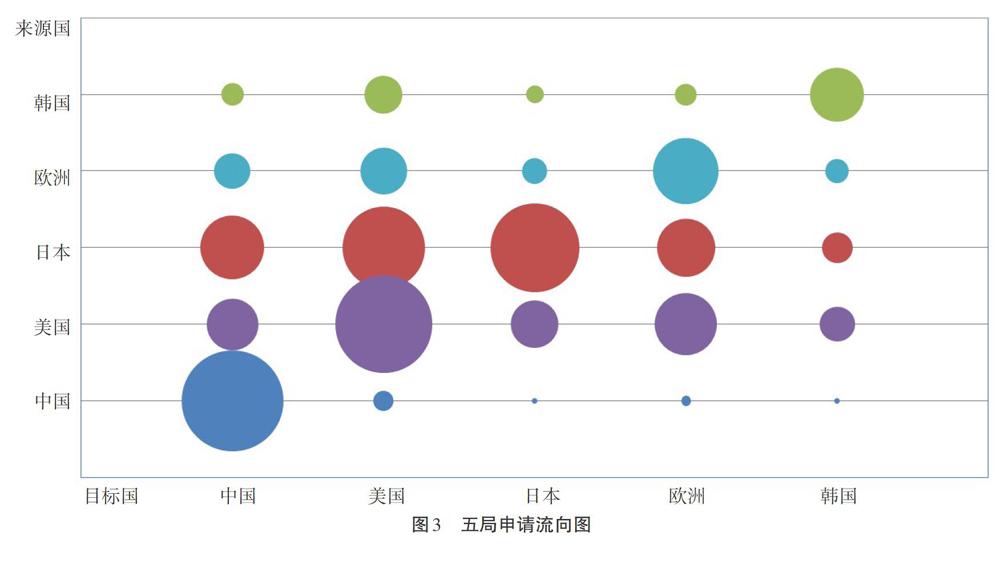
2.4 五局申请流向分析
进一步地,机器人触觉传感技术的主要首次申请国和目的地国的五局流向(中国、日本、韩国、美国、欧洲)进行分析发现,每个首次申请国的主要申请目的地是自己本国(如图2所示)。其次可以发现,日本、欧洲、韩国除了重视本国专利布局外还特别重视对美国专利布局,美国在中国、日本、欧洲和韩国的申请量较平均,注重全球布局;日本在中国、美国、欧洲和韩国的申请量较平均,同样注重全球布局。相比于美国、日本、韩国、欧局对其他国家的专利布局比较重视,中国目前还主要是针对本国进行布局,对其他国家布局较少。
2.5 全球重要申请人分析
从全球专利申请量排名前20位的申请人来看,主要来自日本、中国和美国。其中日本占据7个席位,中国占据5个席位,美国占据3个席位。其中,日本申请人主要为电子企业,包括精工爱普生、发那科、松下电器、佳能、川崎重工业、索尼等,并且精工爱普生的全球的申请量位列第一,发那科紧随其后,位居第二。
中国申请人中主要为高校和科研机构,如东南大学、哈尔滨工业大学、浙江大学、清华大学等,而企业仅占据1个席位,为鸿富锦精密;美国申请人企业包括伊西康内外科、直观外科手术、柯惠LP,其主要涉及为医疗器械为主的制造企业。
图5示出了国内申请人在智能机器人触觉传感领域专利申请的情况。与全球主要申请人相比,国内主要申请人在申请量上具有一定的差距,申请量相对较少。其排名前10的中国申请人中,高校和科研机构占据7个席位,且申请量占比具有绝对优势,而企业僅占3个席位,申请量占比较低。值得注意的是,东南大学在智能机器人触觉传感领域申请量位居第一,其是位列第二的哈尔滨工业大学的申请的两倍之多;东南大学的申请多来自于发明人为宋爱国的团队,其在科研学术的成果也主要集中在智能机器人触觉传感技术。
3 专利技术发展路线
3.1 单一触觉传感器
机器人研究起源于人类希望机器人能够代替人类完成某些重复性、危险性或者不希望从事的工作。如,车间中的焊接工人由于在进行焊接时产生的气体而对健康有害的条件下工作,通过使用工业机器人将自动操作引入焊接领域。然而,机器人由于没有传感系统,在焊接变形使得焊缝发生偏转的情况下,机器人无法传感焊接位置的改变,从而造成事故。如何为机器人提供触觉信号成为了制约机器人性能的关键技术。日立在JP9453075A中提出了将触觉装置安装在焊接机器人的臂上来检测相对位置的改变,从而实现自动焊接,提高了机器人的效率。
由于机器人触觉传感器不可能实现人体全部的触觉功能,人类对机器人触觉的研究只能集中在扩展机器人能力所必须的触觉功能,从而研究出了多种触觉传感器,这些传感器功能单一,仅能完成一种触觉信号的检测,如接触、压力、滑觉、力觉、滑动觉、接近觉等。越多的触觉传感器,就能获得更多的触觉传感信号,为了获取更多的触觉信号,研究者将多种触觉传感器组合来提供多种触觉信号。CN89109336中提供了一种三感觉机械手,具有接触觉、接近觉、滑动觉三种传感器,能够以最小的夹紧力稳定地抓取物体,能成功地抓取能承受的重物。
3.2 综合触觉传感器
触觉传感器的出现给机器人增加了传感系统,提高了机器人的智能性,然而,多种触觉传感器的组合的方式,不仅使得机器人的体积增大,也增加了机器人触觉传感系统的算法实现难度,同时也增加了机器人触觉系统故障的概率。因此,研究者们期望集成了多种触觉信号的传感器。
中国科学院合肥智能机械研究所在CN98111392中提出了一种用于测量机械手手爪接触面上受力情况的多功能类肤型传感器,类皮肤型传感器将触觉、压觉、力觉、滑觉等多种感觉集于一身,可以获取综合的触觉信息, 其功能超过目前大量研究的单一功能的触觉传感器,可望广泛用于空间机器人,精密装配机器人。
3.3 柔性触觉传感器
由于传感器的材料一般都是刚性材料,使得机械手抓取物体时有可能对物体的表面产生破坏,如抓取鸡蛋、玻璃瓶等不具有弹性表面的物体。因此,人们也希望机器人的触觉传感器具有一定的柔性,藉此通过变形自适应目标物体的表面形状,增大接触面,这样一方面有利于更加牢固可靠地抓握目标物体,另一方面还可以获取较多的触觉信息。
中国科学院合肥智能机械研究所CN200310106202提出了一种柔性触觉传感器及触觉信息检测方法,通过神经网络技术标定出磁敏阵列中各磁敏单元的输出电流与磁性橡胶变形量之间的定量关系,可以获取传感器与未知物体发生“软接触”时的接触位置、接触力的空间分布以及目标物体的局部形状等触觉信息。该传感器研制成功后可直接用于机器人技术领域,能安装在机器人手指的指面或机械手夹持器表面,提高抓取和传送等过程的可靠性,也可安装在移动式机器人的身体周围用于避障。
3.4 触觉反馈与再现
随着虚拟现实技术在外科手术仿真、遥操作机器人控制、虚拟制造等领域的应用,力触觉信息的反馈对于虚拟操作的重要性日益显著。在虚拟现实系统中,通过力触觉再现装置,将物体表面的纹理特性反馈给操作者,能增强操作者的沉浸感,有助于提高对虚拟对象的传感和操纵能力。
CN200910033323 针对图像纹理的力触觉再现问题,提出了一种基于从图像灰度恢复形状技术的纹理力触觉再现方法,能较为真实的恢复纹理表面的微观轮廓,使操作者得到对纹理图像较为真实的触感;利用通用的力反馈装置即能模拟虚拟手滑过纹理表面所表达的触感。
US201113137777A提出了一种手术机器人,能够通过手术工具和触觉传感器产生和再现的接触信号,提供触觉反馈,可以防止组织损伤,并且可以由用户容易地控制施加到手术区域组织的力,因此可以检测到肉眼不可见的异常组织。
3.5 情感交流
随着智能机器人的智能化程度的不断提高,智能机器人开始应用于家庭领域,例如给人带来欢笑的宠物机器人,照顾家庭成员的护理机器人,这些都要求智能机器人不仅能接收到外部信息,还能够进行一定的处理,给予反馈。上述智能机器人虽然带有触觉感应系统,但信息处理能力不足,从而智能化程度不高。
CN201610178342提出了用在智能机器人上的触觉传感方法以及触觉传感装置,将外部压力信号转换为数字信号;计算外部压力信号持续的时间值,计算出数字信号变化率;将数字信号变化率与预设的变化阈值进行比较,从而确定外部压力信号的类型;确定压力产生位置,生成与压力产生位置及外部压力信号的类型相对应的情绪表达控制信号,从而触发相应的情绪表达。使智能机器人具有根据受力部位和受力大小表达不同情绪的能力,使智能机器人更加拟人化。
4 重点申请人分析
4.1 精工爱普生
精工爱普生公司(Seiko Epson Corporation)成立于1942年,总部位于日本,主要致力于资讯设备、电子设备和紧密仪器,其中爱普生还提供机器人和集成选件,爱普生工业机器人易于使用、可靠、性能较高并具有较高的整体价值。
4.1.1 专利数据分析。图7可以看出,精工爱普生于2009年开始申请机器人触觉传感方面的专利申请,在2010年和2011年专利申请量逐年攀升,然而,在2012-2015年的申请量有所下降,从2016年开始又迅速回升。精工爱普生在对外专利申请的初期就重视海外布局,尤其是重视在中国、美国的布局;欧洲和韩国不是精工爱普生的理想国,专利布局重视程度较低[2]。
4.1.2 专利技术分析。精工爱普生在机器人触觉方面主要致力于力觉传感技术和利用力觉反馈对机器人进行控制的研究,其通过对力觉检测装置的改进,从不同方面提高了力觉传感的精度,从而应用到机器人中通过压力传感器去传感力的反饋,根据力的反馈来调整机器人的姿态或位置。
针对用于检测剪切力的结构体与用于检测按压力的结构体形成在不同的区域内,则存在导致传感器的尺寸比较大,不适合小型触觉传感器的问题。如精工爱普生在2010年JP2010027325A中提出一种包括触觉传感器的机械手,其通过触觉传感器能够快速精确的检测外压的有无,并通过应力检测元件排列成阵列状,并将其设置在传感器表面从而达到同时检测剪切力和按压力的效果,从而准确判断对象是出于抓持滑落状态或抓持状态。
针对无法对元件施加充分的增压,存在力检测的精度降低之类的问题。JP2013-124419 2013提供了一种用于机械手的力学检测装置,其电路基板设置于第一和第二基板之间,并通过在第一和第二基板上设置凸部,从而使得能够通过凸部与第一/第二基板不经由电路基板而夹持元件, 从而能够防止电路基板成为缓冲部件而使施加于基板上元件的力分散的情况,因此能够对元件充分地施加增压,同时能够使力检测的精度提高。
针对由于从力觉传感器的外周部引出布线,所以在臂动作时,在布线产生拽拉、挠曲、扭曲等,从而对力觉传感器施加多余的力,存在相对于本来想要检测的力产生误差从而检测精度降低这一问题。JP2015-022921提供了一种应用于机器人的力学检测装置,其通过设置指定部件的热膨胀比的大小关系,来缩小部件由膨胀引起的变形量,从而能够抑制不需要的力施加于压电元件;同时通过设置指定部件的耐力比大小,提高部件的强度抑制部件变形,从而能够提高力检测装置的检测精度。
针对从第二振子输出的信号中,难以表现出对应于按压力的微小变化的微小的振幅的变化,难以发挥高的力检测特性的问题。JP2016-211178提供了一种应用于机器人的力学检测传感器,其通过在集体上不同的面上设置梳齿电极,来检测基体表面弹性表面波的频率变化,通过根据频率变化来检测受到的力,能够以高的精度检测微小的力变化,从而提供能够发挥高的力检测特性的力检测传感器。
4.2 发那科公司
发那科公司(FANUC)成立于1956年,是一家日本企业,是专门致力于研究数控系统的公司。1974年,FANUC的首台机器人问世,自此后发那科公司致力于机器人技术上的领先与创新,其机器人主要应用在装配、搬运、焊接、铸造、喷涂、码垛等生产环节。
4.2.1 专利数据分析。图8可以看出,发那科公司涉及机器人触觉传感最早于1994年开始申请,其在2013年前申请量较少,在2014年后申请量迅速上升。发那科在对外专利申请的初期就重视海外布局,其在日本、欧洲、美国和中国的布局比较平均;韩国不是发那科的理想国,专利布局重视程度较低。
4.2.2 专利技术分析。发那科在机器人触觉方面主要致力于利用力觉传感技术对机器人进行控制的研究,根据力的反馈控制机器人的姿势或动作。
为了进行生产中的部件或产品的次品检查,进行使用具备力测定部的机器人测定工件的质量的工作。CN201210328610A提供了工件质量测定功能的机器人,其通过质量推断部根据机器人移动时由力传感器测定的一方向以上的力和由姿势获取部获取的姿势,推断机器人把持的工件的质量。
机器人的各个关节的角度不同,机器人的姿势不同。机器人臂拉伸线条体的力的大小、这些力的方向相互不同。在这种情况下,若仅对应机器人臂的前端部的位置来决定力修正量,则不能对上述的力的大小的差异以及力的方向的差异进行修正。JP2014048971A提供了机器人控制装置,通过力修正量决定部根据存储部来决定力修正量,接触力算出部从力传感器当前的输出减去由内力推定部推定的内力和力修正量,算出接触力,从而控制机器人臂与外部环境接触的接触力。
金属制的力传感器主体的体积有因机器人周围的温度变化而变化的情况。该情况下,因温度变化而引起的力传感器主体的体积变化量被追加至因作用于机器人臂的力而引起的力传感器主体的形变量。从而,有力传感器无法检测人与机器人已接触的情况的担忧,产生机器人对人产生危害的危险变高的问题。CN201610210539提供了一种人机协作机器人系统,其通过负载检测装置内置有检测温度的至少一个温度检测元件,机器人控制装置基于从温度检测元件输出的检测温度是否超过阈值来判定是否使机器人的动作停止,从而确保机器人对人产生危害的危险抑制为最小限度,保证人的安全。
4.3 东南大学
国内申请人关于机器人触觉交互主要集中于高校和科研机构,其中代表性的东南大学在智能机器人触觉交互领域申请量位居第一,其主要是以宋爱国为代表的团队,主要致力于触觉传感、触觉再现方面的研究。但是东南大学申请主要是集中在中国的申请,并未重视专利的布局,在专利布局方面较国外申请人还存在较大差距。
东南大学在机器人触觉方面的第一件专利申请为CN03131767,使得操作者通过该装置可以触摸虚拟环境中的虚拟物体,真实地传感虚拟物体的柔性、刚度、表面纹理等触觉特性。
随着虚拟现实技术在外科手术仿真、遥操作机器人控制、虚拟制造等领域的应用,力触觉信息的反馈对于虚拟操作的重要性日益显著。在虚拟现实系统中,通过力触觉再现装置,将物体表面的纹理特性反馈给操作者,能增强操作者的沉浸感,有助于提高对虚拟对象的传感和操纵能力。因此,CN200910033323提供了一种纹理力触觉再现的方法,通过从图像灰度信息中提取真实纹理的微观三维轮廓信息,绘制成虚拟表面;对虚拟表面的纹理通过力触觉模型进行渲染,计算出的力由通用手控器输出到操作者,其可以应用于机器人控制、外科人手术仿真或提供给盲人操作等[3]。
对触觉的研究都集中于力触觉,也有力触觉再现装置的出现,但是,触觉是人类传感外部世界的重要手段,溫度触觉作为触觉的一种在人的整个传感系统中发挥着重要作用,人手触摸不同热属性的物体时有着不同的温度感觉,据此人可以判断出物体的热属性。在虚拟现实技术中加入温度触觉可以增强人的临场感和沉浸感。CN201010104011提供了一种温度触觉再现装置,能对远程或虚拟环境传感手所接触到的热容量进行温度触觉再现。
5 结论
在机器人触觉研究方面,目前专利申请都集中在日本等半导体芯片技术发达的国家,如日本的精工爱普生和发那科。且精工爱普生和发那科都非常重视专利布局,基本所有的专利申请都在多个国家和地区进行专利申请。精工爱普生和发那科的专利技术路线不同,精工爱普生主要涉及医疗机器人的触觉技术进行改进,注重对微小机器人的触觉进行精准的力触觉传感;而发那科则主要针对工业机器人的触觉技术进行改进,以提高工业机器人在工业生产中的力触觉的精准输出。
中国的机器人触觉研究起步晚于全球的机器人触觉研究,且国内申请人的专利申请普遍没有进行海外专利布局,东南大学在机器人触觉传感方面进行了较多了研究,主要涉及触觉的反馈与再现。
机器人触觉的发展明显滞后于视觉和听觉,这是由于触觉本身较复杂,具有多种不同的触觉信号,把这么多种信号综合在一起来模拟类似于人类皮肤的触觉信号,受现有材料科学、制造加工技术、工艺等限制。目前发展较成熟的是机器人触觉中的力觉,感觉力和进行力的反馈已经能够较好地应用于医疗机器人和工业生产机器人。新研究出来的类似人皮肤的柔性触觉传感器已经可以为机器人提供皮肤,基于这种柔性触觉传感器的应用,引起了基于情感交流的专利申请热潮,如亲子互动、陪护等。
未来的触觉传感技术发展趋势主要包括:新材料,新技术的触觉传感器的集成与多功能化;多信息融合。在多功能传感器集成中,涉及触觉的多种不同功能,未来可选择合适的途径将多功能的触觉传感信息进行融合;微触觉传感器,现有的传感器尺寸较大,未来针对应用场景的变化,触觉传感器将向微型化、量子化发展。
参考文献:
[1] 刘少强,黄惟一,王爱民,宋爱国.机器人触觉传感技术研发的历史现状与趋势[J].机器人,2002(4):362-366.
[2] 马天旗.专利分析方法、图表解读与情报挖掘[M].北京:知识产权出版社,2015.
[3] 杨铁军.专利分析实务手册[M].北京:知识产权出版社,2015.
