STAR2000空管雷达阵地优化方法浅析
2020-10-21王晓松

摘 要 STAR2000空管雷达是引进法国“泰雷兹”公司的一次近程民用航空交通管制雷达,为近进管制提供了较为有利的手段。雷达是按照无人值 守要求设计,采用双通道冗余热备份结构,发射机采用全固态设计,采取网络化和软件化等先进技术手段实现雷达性能的优化。本文提出STAR2000空管雷达阵地化优化方法及思路,从而进一步发挥雷达最佳的应用性能。
关键词 雷达;阵地化;优化
1概述
随着计算机处理能力的提高以及运算速度的提升,为雷达的软件化设计提供可能。早期雷达使用硬件完成信号处理和数据处理功能,为了达到较好的雷达检测性能,需要进行大量的硬件电路设置及调整。而STAR2000雷达的信号处理和数据处理全部由软件实现功能,所以只需要通过工具软件对雷达运行参数进行调整,同时结合少量的硬件测试调整,就能达到很好的目标检测优化效果。
2STAR2000雷达利于优化的结构设计
法国“泰勒斯”公司的STAR2000空管一次雷达采用网络化的物理结构,各分系统之间使用网络通信及连接,并采用全软件化设计,可以通过软件进行大量的参数调整来控制雷达的工作模式,使得该雷达具备极强的环境适应性和阵地现场优化的能力。
2.1 基本优化方法
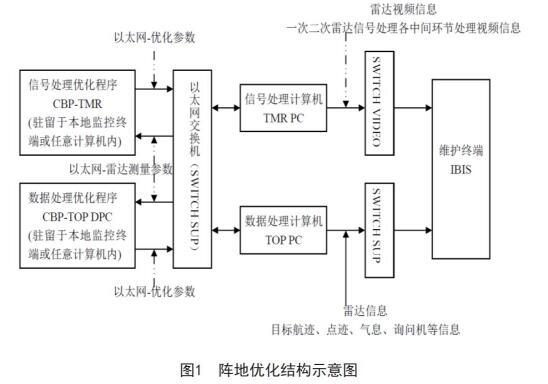
STAR2000雷达阵地基本优化方法是通过改变雷达的关键参数,结合测量结果,观察目标和杂波的原始视频,进行多方面综合后,确认优化的方案,基本结构如图1所示:
对该优化流程的结构而言,STAR2000雷达优化包含三个方面:第一个是使用工具进行优化参数的设计和设置传输;第二个是优化后雷达相关参数的测量和确认;第三个是雷达测量结果的显示及优化结果的确认,包括目标各类特性参数的数据统计和各类视频的显示确认。
2.2 信号处理结构及优化原则
空管雷达信号处理硬件结构如图2所示,包括2块PUMA板、1块RIO板和1台TMR PC计算机。
其中RIO 板为雷达输入输出板,输入接收机的目标通道和气象通道的 I/Q 信号、接收机和微波组件的状态信息;输出触发及控制信号、信号处理中间过程视频(送往 IBIS作为优化的评判标准和优化措施选择的主要手段)。PUMA板为雷达处理数据管理和获取电路板,其通过以太网与信号处理计算机(TMR PC)相连。TMR PC包含三个以太网接口,分别连接SWITCH VIDEO、SWITCH SUP和PUMA 板。TMR PC采用Linux操作系统,主要运行雷达信号处理的各子程序。
TMR PC的信号处理流程或软件组成如图3所示,包括干扰检测、脉冲压缩、幅相补偿测量、饱和及跨周期回波检测、幅相补偿、自适应MTD、滤波器组选择、求模、杂波图、CFAR检测、初始点迹形成、初始点迹门限处理、点迹录取、点迹滤波等诸多模块组成。
各处理模块通过接口与SWITCH SUP链接,实现与监控终端的数据链接。 优化操作软件(CBP)为监控终端计算机的可执行程序,操作员通过CBP将各种优化参数送往信号处理的各模块,实现对干扰检测、脉冲压缩、幅相补偿测量、饱和及跨周期回波检测、幅相补偿、AMTD、滤波器组选择、求模、杂波图、CFAR检测、初始点迹形成、初始点迹门限处理、点迹录取、点迹滤波等所有信号处理环节的控制和优化。
信号自天线接收经过信号处理至形成点迹的整个数据流程,有下面几个方面可进行优化调整:
在信号为射频信号时对雷达头进行优化,以确保:
避免低噪声放大器和接收机由于接收信号功率过大造成饱和。
减少地物杂波回波
优化PE(回波存在)的处理及检测
优化与实际目标相关的数据处理和点迹滤波参数
优化往往是对上述参数进行反复调整的过程,以达到目标检测和虚警抑制的平衡点
2.3 数据处理结构及优化原则
数据处理主要功能是进行目标点迹/航迹相关、滤波和一二次雷达信号点迹合成等相关数据处理,其所有处理进程都由DPC PC计算机完成。
通过SWITCH I/O局域网交换机与信号处理计算机(TMR PC)、授时设备(NTPS)、输出接口设备(Plines)、SSR进行各类数据交换;通过SWITCH SUP局域网交换机与TMR PC、IBIS和监控终端进行相应的数据交换。
点迹相关和关联程序包括三个阶段,预相关阶段、相关阶段和关联阶段。预相关阶段根据距离方位单元对可能相关的点迹/航迹进行初始相关;相关阶段根据检测目标的特征参数并按照每个预相关点迹的时间关系进行外推处理,同时计算该点迹-航迹对的检测概率(综合考虑预测点迹与实测点迹的距离差等);关联阶段解决相关目标的冲突,并根据检测概率形成正确的点迹-航迹概率对。通过CBP软件可对一下点迹-航迹相关的各项参数进行调整:目标特征参数(PSR航迹起批或航迹确认的速度门限,及纵向和横向加速度等)、航迹起批参数(速度、丢点率、丢点时间等)、特殊航迹处理区等。
航迹更新和滤波包括两个过程,航迹更新通过卡尔曼滤波对后续航迹点进行更新和平滑,即航迹的实测点迹和预测点迹间的位置和速度差进行平滑得到与航迹相关点迹的数据;航迹滤波则根据相应的准则对杂波航迹、慢速目标航迹和仙波进行滤波。
3整体优化流程
STAR2000雷达通过调整雷达参数以适应不同的阵地环境,从而实现雷达性能最佳。 雷达性能优化的依据是雷达的基本探测性能参数,包括雷达检测概率、虚警率、测量精度、虚假航迹数、一二次雷达目标合成率、一二次雷达目标合成丢失率等。
雷达阵地优化可分为三个层次,第一层为雷达初始参数设置,加载信号处理和数据处理系统的初始参数;第二层为雷达优化参数的调整设置,根据显示终端的原始视频信号,适当调整天线的倾角、雷达的工作参数(如STC设置、动态范围、滤波器参数、CFAR门限参数等);第三层为雷达性能分析,SASSC软件根据雷达的输出数据分析雷达的主要性能指标,如检测概率、虚假点迹数、距离和方位精度、误码率等。然后根据SASSC的结果再调整雷达的可调参数,直到雷达性能达到指标要求。
STAR2000雷达的阵地优化调整是通过CBP软件实现,可读取当前雷达的运行参数,并通过更改运行参数进行性能调整。通常在雷达优化的过程中,主要进行如下参数的调整:雷达时序、天线转速、工作频率、方位数据测量及校准、STC设置、高低波束选择、杂波区(固定杂波、地面车辆干扰等)设置、视频输出选择以及通道的状态选择等。
SASSC雷达性能分析软件有数据采集和性能分析等两个阶段组成。数据采集是根据“EUROCONCAL”标准(SUR.ET1.ST03. 1000-STD-01-01)采集雷达检测目标信息,并产生目标检测能力的各项评估报告,包括平滑/滤波后的一次雷达目标报告、平滑/滤波后的二次雷达目标报告、平滑/滤波后的一二次雷达合成目标报告以及分析所需的其他相关数据。雷达性能分析阶段主要分析一二次雷达的性能参数、一二次雷达数据合成参数、雷达阵地数据处理延时以及雷达的可用性等,其中性能参数包括检测概率、虚警概率、定位精度和分辨率,一二次合成参数包括目标关联概率和虚警关联概率等。
4结束语
正如前文所说,优化是在提高目标检测能力与抑制虚警两个方面之间找到最佳的平衡点,也就是说检测能力的提高必然会带来虚警的增多,同样虚警的减少也会带来检测能力的下降。所有优化的手段及方法都同时对正常雷达信号和杂波起到相同的作用,通过修改各项参数,可以较好地改善雷达的检测和虚警,但无法完全排除丢点或假情的现象。
对雷达优化是雷达保障人员长时间经验积累的过程,需长期实践操作和分析。在调整参数的过程中总结规律,可以逐渐发现各项参数在不同时间,不同环境下的最佳值,达到较为良好的优化效果,使得雷达发挥出最佳的应用效能。
參考文献
[1] Thales Primary Surveillance Radar STAR 2000-Technical Manual Book.
作者简介
王晓松(1970-),男,北京市顺义区人;高级工程师,现就职单位:华北空管局,研究方向:从事航管雷达设备维护维修工作,侧重二次雷达“S”模式研究。
