Searching-智能探人者
2020-10-21孙晓叶毛紫荆卢钰均郑翔宇施玥崔静
孙晓叶 毛紫荆 卢钰均 郑翔宇 施玥 崔静

摘 要:Searching-智能探人者下位机硬件是基于树莓派3B+履带坦克智能设备,以phython作为开发语言,硬件主要包含主控模块、七彩灯模块,电机模块,超声波模块,红外避障寻光模块和USB摄像头等模块;上位机是基于安卓开发的APP,通过蓝牙或WiFi方式无线连接到下位机智能终端,实现鸣笛,点灯,舵机控制,自动避障,巡线,探测等功能。本系统能协助救援者在人力所不能及的范围内进行监视、侦听,为救援者采取正确行动提供现实有效的帮助。
关键词:应急处置;树莓派;远程控制;移动智能终端
中图分类号:TP393 文献标志码:A 文章编号:2095-2945(2020)30-0017-04
Abstract: Searching-Intelligent Detector lower-level computer hardware is based on the Raspberry Pi 3B+ crawler tank intelligent device, with Phython as the development language. The hardware mainly includes the main control module, colorful light module, motor module, ultrasonic module, infrared obstacle avoidance and light-finding module And USB camera and other modules; the host computer is based on the APP developed by Android, wirelessly connected to the lower computer intelligent terminal via Bluetooth or WiFi, to achieve whistle, lighting, servo control, automatic obstacle avoidance, line patrol, detection and other functions. The system can assist rescuers to monitor and intercept within the reach of human resources, and provide realistic and effective help for rescuers to take corrective actions.
Keywords: emergency handling; Raspberry Pi; remote control; mobile intelligent terminal
1 概述
“科技改变世界”自千禧之年后不再是一句口号,而是转变成为了现实,我们正处于全世界第三次科技革命的浪潮当中,随处可见的智能化设备在实际生活中运用, 不仅能帮助人类去完成很多任务,而且这些任务中降低了人力成本,提升了工作效率,创造了更多的社会价值。尽管时代的变化日新月异,人工智能的更新换代速度令人咋舌,但是在自然面前我们始终很渺小,自然的力量人类很难与之抗衡,与自然和谐相处才是人类长久生存的王道。在抢救因自然灾害被困的人员时,往往探查到的时间越早就能够大幅度降低自然灾害的破坏[1]。一般来说,开展搜救的方法往往是通过一些仪器检测环境,人力或者机械挖掘以及通过搜救犬的嗅觉寻找生命迹象,但在实施救援工作之前没有对环境有正确的认识与评估,非但不能完成救援工作,甚至可能造成更大的损失。而人工智能能更好地协助救援工作的进行。灾后搜救是救助管理工作中的重要环节,现在的救援方式可以在传统的基础之上,增加对现代科技的运用。这不仅是一次全新的尝试更能够弥补当下单一的救援方式所造成的各种信息不准确的问题。
本系统产品旨在协助人类在人力所不能及的范围进行监视、侦听,为人类采取正确行动提供现实有效的信息,避免因信息的缺失而导致的“人间悲剧”。通过应用于搜救、公安办案系统方面,它可以充当人类的“感官”,深入人所不能及的地域,为救助人员提供受害者的信息,为进一步救援提供帮助,甚至代替救援人员进行救援是势在必行的。
2 系统总体设计方案
系统总体设计方案主要分为两大部分来进行开发, 第一个部分是对上位机部分进行设计, 第二个部分是对下位机部分进行设计。Searching-智能探人者总体方案设计如图1所示。
2.1 上位机设计
Searching-智能探人者采用的是安卓的移动端来控制设备的运动,同时设备的传感器将采集的信息发送给安卓的移动端显示出来。系统的软件开发是选用eclipse软件编写Android客户端, 安装APK在手机上, 经过操作手机, Searching-智能探人者主控功能是通过蓝牙和WiFi作为信息的载体,让设备端的蓝牙模块和树莓派配置成的路由器接收信号到树莓派主板中进行处理,树莓派输出相应的信号使电机驱动模块工作,并通过路串口发送给串口指令来控制设备的行进,停止,鸣笛,加减速,亮灯,转向以及舵机云台控制,七彩探照灯,超声波避障,巡线等功能。树莓派视频功能则是通过安卓的移动端连接树莓派路由器来获取到WiFi信号,USB摄像头在连接到树莓派的插口后采集的图像信息数据,然后实时的通过WiFi发送给安卓的移动终端上。上位机设计流程图,如图2所示。
2.2 下位机设计
下位机 (Searching-智能探人者实体硬件简称下位机) 软件用Python程序设计语言进行编写。Python相对于其他的一些编程语言有着简洁明确的优点。并且Python功能库丰富,可移植性强, 非常适合本次设计。树莓派控制端是通过硬件安装的蓝牙模块接收Android端传来的信息, 进行字符串解析,得到想要的指令或者信息。通過电机驱动模块进行控制车的行进或速度的调整,超声避障模块发射超声波根据发回来的声波判断前方是否有障碍物,七彩灯模块进行探照。在解析到用户的命令之后,硬件便执行相应的功能。下位机流程设计图,如图3所示。
3 系统功能实现
3.1 系统硬件整体功能模块
Searching-智能探人者硬件构成包含主控模块、七彩灯模块,电机模块,超声波模块,红外避障寻光模块和USB摄像头等模块组成。在系统开发的过程中考虑性能、成本、开发难度等客观因素,此次经过综合考虑选取了最佳的方案。Searching-智能探人者硬件模块如图4所示。
3.2 主程序模块设计
系统的主程序是通过对树莓派主板的控制完成的,首先通过对APP连接到的蓝牙模块输入的指令信息然后进行解析,来控制电机驱动,从而达到控制硬件正常运行的目的。由于本次系统选用的树莓派3B+开发板是没有配置FLASE的,所以它是用SD卡的启动,在SD卡插入树莓派之前我们需要先下载相应镜像,并通过烧录工具将其烧写在SD上,完成之后插入SD卡启动系统即可,本次系统当中我们选用的是Raspbin操作系统。
树莓派定时对蓝牙模块的串口读数据,检测串口是否有数据读出,如果有数据读出则对读出的数据进行分析,分别对应设备的前进、后退、左转、右转、停止的控制。系统选用的是双路直流电机的控制Searching-智能探人者选用的是TB6612FNG驱动芯片系统的巡线功能主要是基于黑色线中心判断,由于黑线在地板上,而颜色不同对光线的反射系数是不一样的,因此系统是用红外传感器来帮助巡线功能的完成,巡线功能的基本原理是利用物体的反射性质,硬件设备巡黑线行驶,然而当红外传感器发射红外线在黑颜色的线上时由于光的吸收原理红外线就会被黑线吸收掉,但是如果红外线是发射到其他的颜色上会重新反射到红外的接受管上。这时树莓派接收到反射回来的红外光线,以红外光线为依据来确定黑线的位置以及规划Searching-智能探人者的行进路线。根据上述不同特点通过相应的代码完成Searching-智能探人者的巡线功能。关键代码如图5所示。
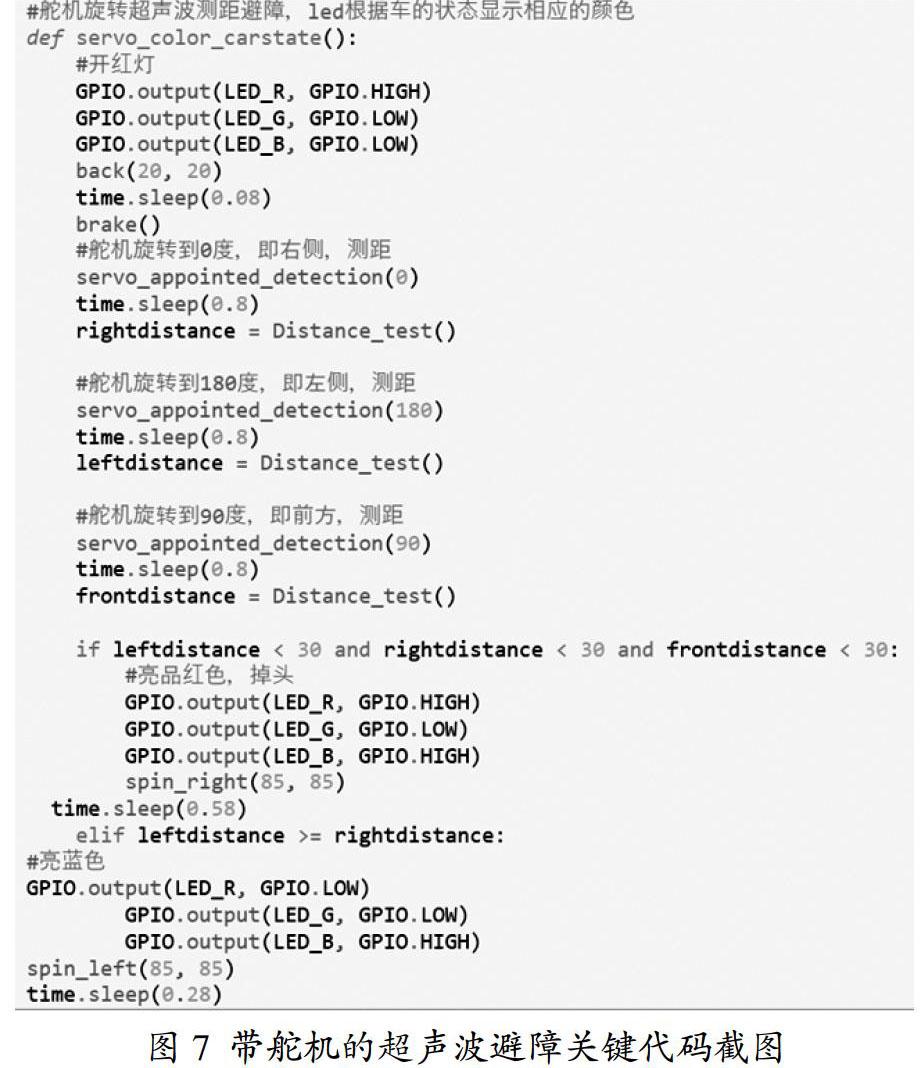
本系统带舵机超声波避障用到的舵机是9G舵机SG90,这款舵机体积相对较小,虽然扭矩不算大,但对于系统要求的转向已经足够。在舵机安装之前要进行校准。
超声波测距的原理是先通过超声波模块发出超声波,然后再根据是接收器接到超声波时的时间差。假设超声波模块的发射器在某一个方位发射了超声波,模块在超声波发射以后边开始计时,当超声波遇见障碍物之后就会被反射回来,此时超声波模块的接收器在接受到声波后便停止计时。在程序的编写中我们可以根据超声波测距相应的公式进行计算来确定人员或者物体的位置。触发超声波模块的测距功能如图6所示。关键代码如图7所示。
3.3 APP系统设计
(1)主控界面
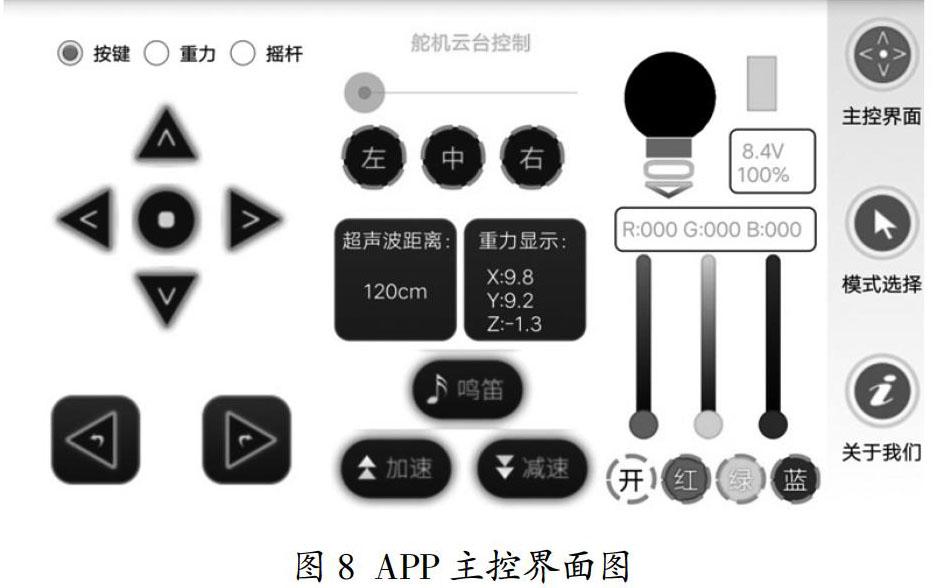
APP的连接到Searching-智能探人者蓝牙之后,就进入了APP主控界面,此时可点击相应的按键对硬件行进加速,减速,舵机云台的转向,灯光颜色等对设备进行控制。还可以在APP上显示一些对应的数据。APP使用的是按键控件根据逻辑设计的原理只需要对不同按键进行按下和松开,蓝牙通信发送控制设备的相应代码发送对应设备控制代码, 然后设备通过对接收到的代码进行解码就会做出对应的反应。
APP主控界面图,如图8所示。
(2)用户可通过主控界面进入模式选择页面,可以在模式选择页面进行相应的操控,主要分为七彩探照、巡线模式、避障模式、树莓派视频四个模式,用户可以选择相应的模式,Searching-智能探人者将会作出相应的反应。APP模式选择图,如图9所示。
(3)树莓派视频功能
Searching-智能探人者这个基于树莓派的WiFi智能设备的主控板已经配置成路由器模式,开机时启动mjpeg视频服务器和bluetooth_control蓝牙控制进程。路由器IP地址为192.168.50.1。
系统在工作时,智能设备通过配置成功的树莓派路由器与上位机建立无线连接。在进入树莓派视频功能后,USB摄像头捕捉到的图像数据经过树莓派路由器内部处理,然后通过无线网络传送到安卓的一等终端中显示。[2-4]监控人员在根据视频图像,将上位机的指令通过WiFi传输给树莓派设备,从而实现Searching-智能探人者的行进、舵机的转向,摄像头的角度的移动和灯光的控制。
4 结束语
Searching-智能探人者是基于树莓派的智能设备搜救系统。通过反复的进行代码修改和调试,Searching-智能探人者这个基于树莓派的智能设备搜救系统树莓派的智能设备系统预设功能基本实现,能通过Android的移动终端设备控制设备的转向及行走,通过舵机的转向和拍摄的实时图像获取路况信息以及超声波识别障碍物信息进行自主避障,并通过平台反馈给用户。本系统设计的主要的意义在于将功能强大的树莓派、蓝牙和WiFi通信技术和安卓的智能终端进行创新性的结合,简化了传统终端的复杂难操作的现况。这次设计的Android软件以及蓝牙和WiFi双通讯的控制系统不但能够用于灾害发生的应急处理系统,还可以在经过修改后还可以应用于更多的智能控制场景,使其发挥更大更多的作用。
参考文献:
[1]段志国,赵怀北,刘叔军,等.基于远程控制的六足搜救机器人系统的设计[J].计算机测量与控制,2015,23(07):2392-2395.
[2]严毓培,陈志钦,严泽强,等.智能家居服务型机器人的设计与开发[J].电子世界,2016(23):198-199.
[3]沈理强,周张涛,王泽南,等.基于树莓派的交通燈实时控制系统[J].电子世界,2018(3):164-166.
[4]郝卫波,杜廷龙,李国朋.基于树莓派的嵌入式网络安全传输系统设计[J].电子世界,2016(14):147.
