基于DOB的永磁同步电机蚁群优化鲁棒控制
2020-10-21白雪儿杨向宇白雪宁
白雪儿,杨向宇,白雪宁
(华南理工大学 电力学院,广东 广州 510641)
0 引言
永磁同步电机(permanent magnet synchronous motor,PMSM)由于其高功率密度、高转矩惯量比和控制性能优良等特点,在驱动方面具有广阔的应用前景。近年来,许多控制方法如预测控制、反馈线性化、无源性等都被提出并应用到电机控制上,但这些算法均建立在模型精确的前提下,无法很好应对实际应用中模型不准确、参数摄动、负载扰动等问题[1],因此如何克服不确定性而获得满意的效果,是一个研究热点。
鲁棒H∞混合灵敏度控制在考虑了一定的模型不确定性后,将对系统的性能要求和稳定性要求转换成标准H∞控制进行求解,能较好兼顾鲁棒稳定性和鲁棒性能。文献[2]将H∞混合灵敏度控制应用到永磁同步电机上,实验验证抗扰性能得到改善,但加权函数参数由人工设计试凑的方法获得,耗时耗力且对象适配度不高。文献[3]以误差积分准则为目标函数,采用遗传算法对加权函数参数寻优,与常规混合灵敏度控制器对比,响应更快且抗扰性更强,但超调较大、稳态精度未知且并未考虑发生参数摄动时的情况。文献[4]从系统带宽角度设计加权函数,通过不断调整加权函数参数求解得到一阶鲁棒控制器,与常规混合灵敏度控制相比鲁棒性更强,但未考虑系统抗扰性能。文献[5]采用混合灵敏度法在外回路设计控制器、在内回路设计扰动观测器(disturbance observer,DOB),保证高稳态精度的同时提高了抗扰性,但设计过程繁琐、控制器阶次过高,且并未考虑参数间的耦合。
为应对实际工况中参数测量不准确、带载时折算到电机轴端的转动惯量发生变化等问题,本文采用H∞混合灵敏度设计速度控制器。为了在保证控制精度和快速性的同时提高抗扰性,加入扰动观测器对负载转矩进行补偿。最后应用蚁群优化算法对加权函数参数和DOB参数进行组合优化。
1 PMSM控制系统模型
dq旋转两相坐标系下的永磁同步电机电压方程为
(1)
磁链方程
(2)
坐标变换采用幅值相等原则时,转矩方程为
Te=1.5np(ψdiq-ψqid)
(3)
运动方程
(4)
式中:p是微分算子;ω是转子旋转电角速度;R1是定子等效电阻;ud、uq分别是定子d轴和q轴电压;id、iq分别是定子d轴和q轴电流;Ψd、Ψq分别是定子d轴和q轴磁链;Ld、Lq分别是d轴和q轴等效电感;np是极对数;J是折算到电动机轴端的转动惯量;Te是电磁转矩;TL是负载转矩;B是黏滞系数。
令Ke=npΨf,Kte=1.5Ke,经拉氏变换后可得电机传递函数模型M(s)。通过id=0策略实现解耦控制后,采用转速、电流双闭环控制如图1所示。
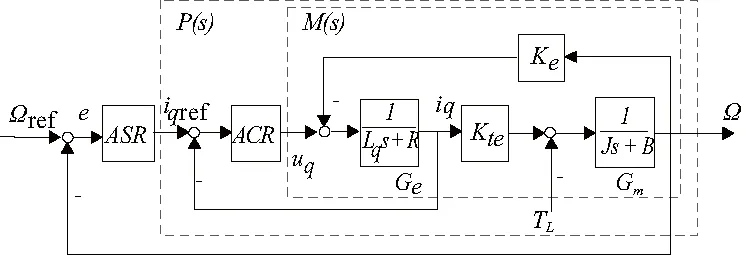
图1 PMSM双闭环控制系统框图
其中P(s)为转速控制器的实际控制对象,其标称模型为
(5)
负载转矩TL到转速的传递函数为
(6)
特征方程最高阶系数为JLq,由于小型PMSM转动惯量和交轴电感很小,故该系数可近似为0。
2 PMSM鲁棒混合灵敏度转速控制器
2.1 H∞混合灵敏度控制器
在上述双闭环控制系统中,电流环由PI控制器控制,速度环采用H∞混合灵敏度法设计,如图2所示。
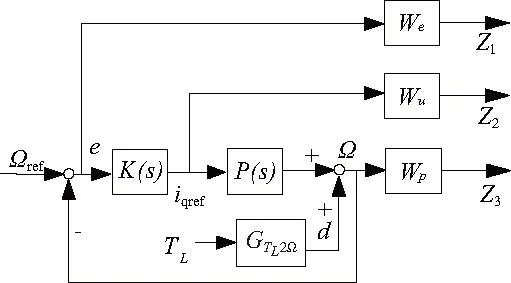
图2 H∞混合灵敏度控制框图
为考察跟踪误差e、控制量iqref和输出转速Ω,对三者分别乘以加权函数We、Wu、Wp,所得Z1、Z2、Z3作为评价输出。则系统输入Ωref到评价输出Z1、Z2、Z3的传递函数为
Z1(s)/Ωref(s)=WeS=We(1+PK)-1
(7)
Z2(s)/Ωref(s)=WuR=Wu(1+PK)-1K
(8)
Z3(s)/Ωref(s)=WPT=WP(1+PK)-1PK
(9)
式中S、R、T分别为该系统在标称情况下的灵敏度函数、输入灵敏度函数和补灵敏度函数。
将混合灵敏度问题转换成如图3所示的标准H∞控制问题。当永磁同步电机参数测量不准或发生摄动时,只要发生摄动的电流环模型满足式(10)的乘积摄动模型:
(10)
且输入输出传递函数矩阵Tzw(s)满足
(11)
则式(11)求解所得的实有控制器K可镇定标称系统和摄动系统并使e、iqref和Ω达到期望范围。
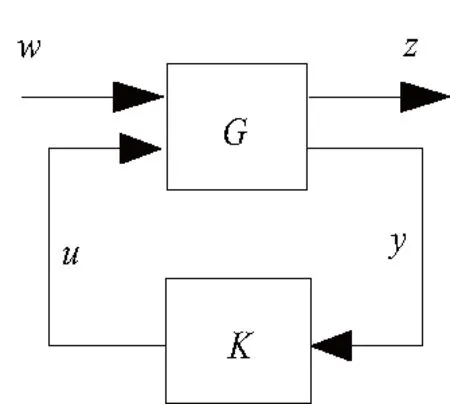
图3 标准H∞控制
2.2 加权函数的确定
由式(11)可知,得到控制器的关键在于加权函数的设计。考虑到可实现性,加权函数应选取正则、稳定、非最小相位传递函数。为避免运算量过大,在保证控制效果前提下宜选阶次小的传递函数。
1)We。根据图2,灵敏度函数
(12)
即S既表征指令Ωref下的相对跟踪误差,也表征干扰d对电机输出Ω的影响。在需要满足性能要求的低频段,S应保持低增益。因此要求We具有低通特性。此外,由式(5)、式(7)、式(9)可得,闭环系统T对转动惯量J的归一化灵敏度为
(13)
因此We的转折频率应不小于P对J的归一化灵敏度。
2)Wp。式(10)中Wp表征系统鲁棒稳定得到满足的模型不确定范围。T一般要求为低通函数,因此Wp应具有高通特性,转折频率应不小于满足性能要求最高频率。
3)Wu。引入Wu一方面可放宽式(11)中存在解的条件,另一方面可限制控制量iqref大小,防止实际运行过程中控制量过大对执行器产生损害[5]。通常取Wu为常数。
根据上述要求,设We和Wp的结构分别为
(14)
当s→ 0时,We→1/As,稳态误差ess→As。因此As可以根据稳态精度要求来直接确定。其余参数需要在合理范围内按响应进行调整。
3 基于DOB的PMSM鲁棒控制系统
3.1 PMSM混合灵敏度控制系统的抗扰性
在混合灵敏度方法中,通常假设扰动施加于被控对象输出端。但是PMSM的转矩扰动施加点位于对象模型内,需通过等效变换将其移动到对象输出端,如图2所示。设转矩扰动TL(s)为阶跃输入,则根据式(6),它与等效到电机输出端的扰动d(s)的对比图如图4所示。
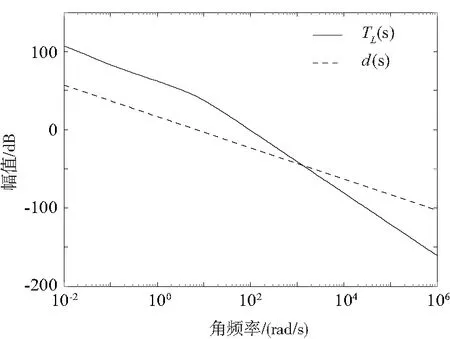
图4 转矩扰动与等效扰动示意图
可见,为减少d(s)对系统的影响,灵敏度函数S的截止频率还应更高。但S和T为互补关系,需要在二者间进行折中。因此对于小型PMSM,在保证系统响应快速性和精准度的前提下,混合灵敏度控制器难以获得很好的抗扰性。为了兼顾二者,可以加入一个扰动观测器对负载转矩进行补偿。
3.2 DOB的设计
本文引入由T. Umeno和Y. Hori提出的扰动观测器[6],以进一步提高系统抗扰性。其输入输出传递函数为
(15)
(16)
式中:P(s)为PMSM交轴电流环;Pn(s)为其标称模型。
Q滤波器应满足以下条件:
1) 考虑到可实现性,其分母阶次应大于等于标称模型分母阶次;但其阶次不宜太高以免系统阶次过高。
2)Q滤波器应具有低通特性,其增益在低频段接近1,既抑制低频扰动也降低对前向通道的影响;在高频段趋于0以抑制高频噪声[7]。
按照以上两个条件,设Q滤波器的形式为
(17)
加入DOB后系统框图如图5所示。在H∞控制器和DOB共同作用下,对象后扰动到转速的传递函数为
(18)
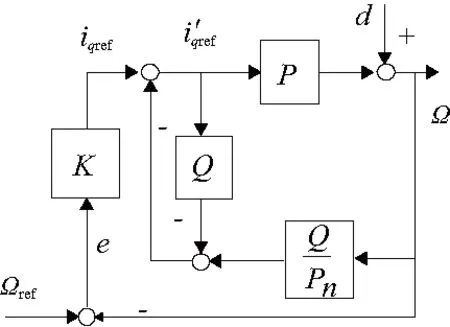
图5 加入DOB后系统框图
4 蚁群算法优化H∞控制
根据前文所述,系统中待确定的参数有加权函数参数MT、MS、ωs、ωt、Wu和DOB参数μ。这些参数存在一定的耦合性,需要协同寻优。蚁群算法在求解离散组合优化问题方面具有优越性[8],因而采用蚁群算法对参数组合寻优,从而减少时间和人力消耗、克服保守性。应用蚁群算法优化参数的步骤如下:
1) 初始化
假设数位共n个,设定各节点信息素初始值τ、挥发系数ρ和每只蚂蚁走完一次后释放的信息素总量Qτ,清零迭代次数编号Nc和各节点信息素增加量Δτ。设定蚂蚁数为m并将其随机放置在第一个数位的10个节点上。
2) 按概率选择下一步节点
在第Nc次迭代中,即将走第i步的蚂蚁k选择下一节点yij(j=0,1,…,9)的概率为
(19)
其中τ(xi,yij,Nc)表示Nc-1次迭代后在节点(xi,yij)残留的信息素;η(xi,yij,Nc)为该节点的启发因子。
(20)

3) 计算目标函数F
当所有蚂蚁完成一次各自的路程后,计算每只蚂蚁对应的系统输出的性能指标
F=W1F1+W2F2+W3F3+W4F4+W5F5
(21)
其中W1-W5分别为性能指标F1-F5的权重,各性能指标取与期望值相比的相对值。
4) 信息素更新
根据F更新各节点上的信息素以求F的最大值:
τnext(xi,yij,Nc+1)=ρτ(xi,yij,Nc)+Δτ(xi,yij,Nc)
(22)
(23)
(24)
5) 迭代终止条件
当整个蚁群收敛到同一路径且目标函数F1-F5均达到期望值时,认为迭代可终止,寻优结束,输出最优参数组合。
5 仿真及其分析
在Matlab/Simulink中搭建仿真模型,对设计的控制器进行可行性验证。利用Matlab自带的鲁棒控制工具箱中的hinfsyn函数即可求解得到鲁棒控制器。其中电流环PI参数分别为300、15,而电机参数设定如表1所示。

表1 永磁同步电机参数
最终寻优所得参数如表2所示。两种情况均满足不等式(11),鲁棒稳定性和鲁棒性能得到满足。
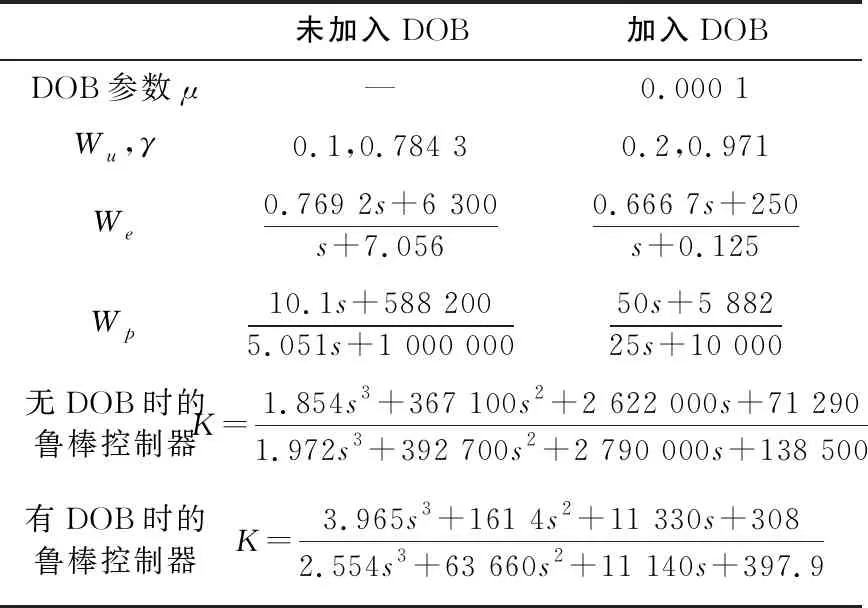
表2 寻优结果
5.1 蚁群寻优的收敛
本文选用的性能指标及期望值如表3所示。其中对调节时间的定义为从指令发生改变到速度到达并维持在指令的±0.2%以内的时间。

表3 所选性能指标及期望值
如图6(a)所示,经过40次迭代后寻得的最大目标函数已趋于稳定且达到期望值。
图6(b)给出了蚁群路径分布图,为便于观察将蚂蚁的落点扩散至各节点附近,节点上的点密度越大意味着越多蚂蚁走过该节点。蚁群遍历了所有节点,且最终全部集中在同一路径上。
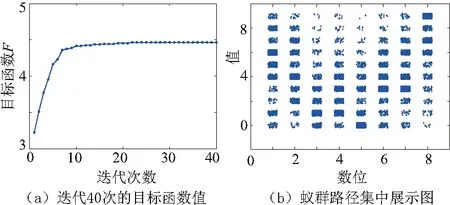
图6 寻优迭代收敛
5.2 仿真结果分析
对同样的双闭环系统,分别用PI控制器、按文献[5] 中的方法设计得到的未优化鲁棒控制器与本文设计的优化鲁棒控制器做阶跃响应的对比。仿真条件设定为转速指令1 500r/min并从0s开始空载运行,在0.5s时加入7N·m的负载转矩作为扰动。
1) 无参数摄动时
由图7可见,优化前后的鲁棒控制均能达到±0.2%的稳态精度。优化鲁棒控制比未优化鲁棒控制和PI控制更快进入稳态(调节时间<0.01 s),且无超调,稳差在±0.2%以内。
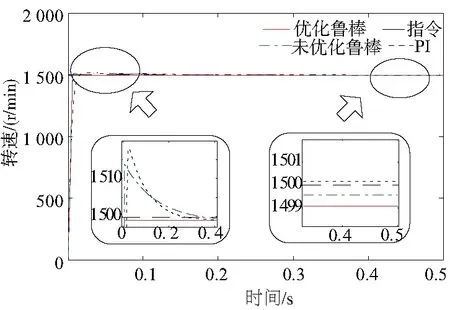
图7 无参数摄动时输出转速对比
2) 存在参数摄动时
PMSM速度控制系统主要对转动惯量J的变化较为敏感,故仅展现J摄动时的控制效果。
当J为2J0时,由图8可见,在全频段有 |P/Pn-1|≤|WP|,满足如式(10)的乘积摄动模型。不同控制系统对J的归一化灵敏度如图9所示,可见优化鲁棒控制下闭环系统对J的摄动更为不敏感。
由图10可知,鲁棒控制和PI控制超调分别为约2%和3%;而优化鲁棒控制响应几乎不受波动,无超调且稳差仍在±0.2%以内,显现出更优秀的鲁棒性能。
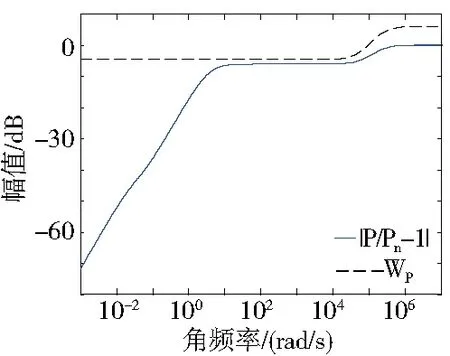
图8 J =2J0时满足乘积摄动模型

图9 T对J的归一化灵敏度
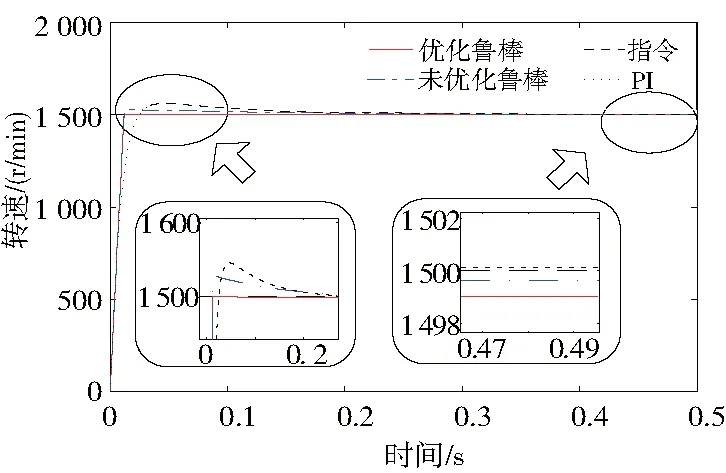
图10 J=2J0时输出转速对比
图11中iqref波形显示,相比下优化鲁棒控制在电机启动阶段维持电流较大值时间更长,更快达到稳态。
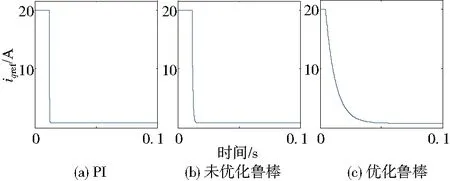
图11 J=2J0时控制量
3) 发生负载扰动时
图12、图13和图14分别展示了发生负载扰动时,优化鲁棒控制器带DOB前后的速度、控制量和扰动观测情况。
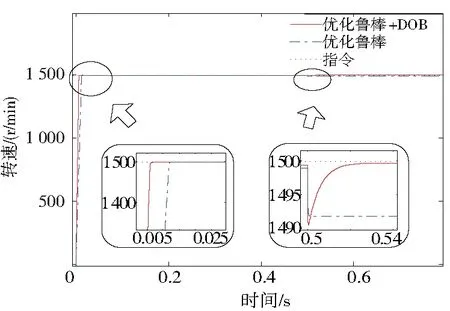
图12 发生负载扰动时输出转速对比
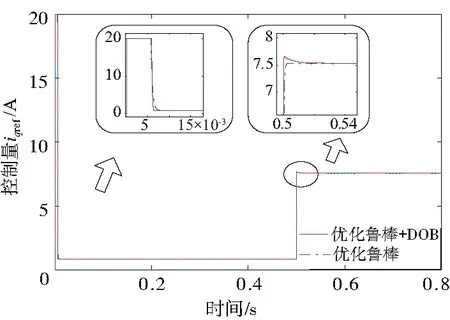
图13 发生负载扰动时控制量iqref对比
根据图12,加入DOB后,速度暂降基本不变(约0.7%),但稳态精度在约0.01s后恢复到了±0.2%,抗扰能力大大提升。根据图13,加入DOB后,发生负载扰动时控制量在极短时间内上升以减小转速下降幅度,并很快恢复稳态。根据图14,DOB观测到的负载转矩值在0.002s左右接近实际扰动值,观测误差约1%。
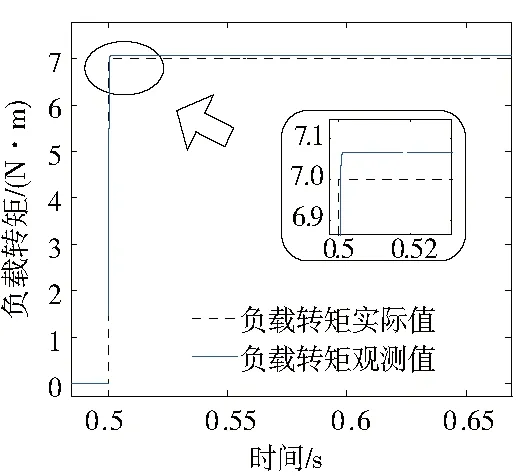
图14 负载观测情况
为分析鲁棒控制器与DOB对提高系统抗扰性的贡献,根据式(9)、式(16)、式(18)计算出二者单独作用时扰动d到转速Ω的传递函数幅值如图15所示。在低于104的频段,DOB对扰动的抑制作用明显大于控制器的作用,对扰动幅值的削弱约为控制器的平方。
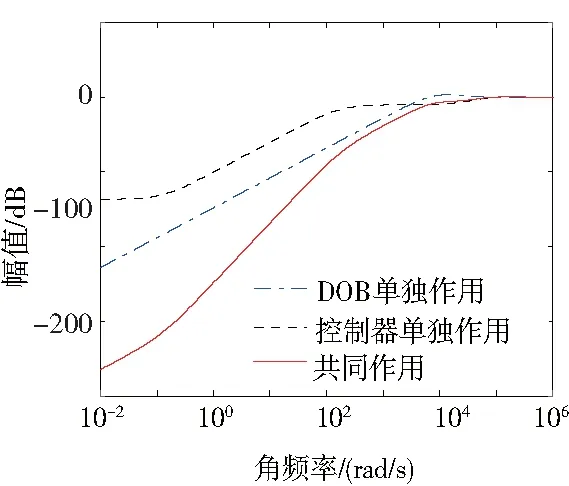
图15 控制器与DOB的贡献
6 结语
本文以PMSM为被控对象,采用混合灵敏度设计速度控制器以提高鲁棒性,引入二阶DOB以使系统在保持高稳态精度和平稳快速过渡前提下提高抗扰性,最后利用蚁群算法对参数进行优化,并对DOB和控制器对抗扰性提高的贡献进行了分析。仿真结果表明,系统在遭遇电机参数摄动、负载扰动等突发情况下仍能保持优越的跟踪性能,在0.01 s内即可到达±0.2%的稳态精度,发生扰动时在0.01 s内可恢复同样的稳态精度,与PI和常规混合灵敏度控制相比具有很强的鲁棒性和抗扰性,在复杂未知的实际工况中非常具有优势。
