一种带权重的飞机翼身装配仿真方法
2020-10-21邢宏文刘思仁邱磊张亚
邢宏文,刘思仁,邱磊,张亚
(上海飞机制造有限公司,上海 200436)
0 引言
随着我国航空事业的发展,对飞机的产能也提出了更高的要求。飞机装配作为飞机生产制造的主要环节[1],在整个过程中占有极大的比重,通常为飞机制造劳动总量的40%~50%,而翼身装配是整个飞机装配过程中的重点。因此如果能缩短飞机翼身装配的时间,将其工艺过程中的步骤提前或简化,对于飞机产能的提升将产生极大的帮助。
现有的现场预装装配方法:首先将飞机翼身和机翼运到理论装配位置,之后通过局部微调的方式,对机翼的位姿做出细小改变,使其尽可能地满足工艺要求;在间隙测量方面,采用人工利用塞尺的方式,在关键位置测出装配间隙大小。这种方法能很好地判断装配过程中零部件是否满足各种要求[2],如装配后的间隙分布以及各种装配特征是否符合工艺文件要求,飞机整体是否满足对称性、气动性要求等。但也存在预装配过程实际工作量大,装配过程长,间隙测量数据不连续等问题[3]。
作为非接触式的主动观测系统,双目视觉配合三维激光扫描仪因其稳定性好、测量速度快、数据精度高等突出优势[4],已在各个领域中起到了重要的作用,例如,GONZLEZ Aguileradeng D等[5]通过在10个月内对西班牙阿维拉城中的一条大坝进行的连续观测,得到了不同时期大坝的点云数据,并依此对大坝工程做出了安全性评估;GIKAS V等[6]基于希腊的两个建筑工地,讨论了激光扫描活动的规划、执行、数据处理和分析阶段,重点讨论了地理定位、网格模型生成和截面提取,介绍了静态激光扫描法的工作原理及其在隧道施工中的应用。赵佩铭[7]对桥主梁、主拱等进行扫描建模,对构件加工精度进行检验,通过点云模型实现数字化模拟预拼装,将模拟预拼效果与现场预拼情况进行比较,分析数字化模拟预拼精度,避免了钢构件加工误差过大对工程安装造成的影响。郭琳娜等[8]利用地面三维激光扫描技术进行大比例尺地形测绘,对扫描数据建模,并以此来完成地形图成图。沈小军等[9]对输电线路杆塔进行扫描,获取其三维数据,以此来分析杆塔倾斜程度。李艳等[10]制定了一套包含古建筑激光扫描测绘、三维建模完整的解决方案,为古建筑园林数字保护、模拟修缮方案等提供技术支持。万怡平等[11]以北京大学西门内一尊华表的数字化和三维建模为例,分析了地面三维激光扫描(TLS)技术在表面复杂纹理地物三维重建中的难点,并提出相应的解决方案。
基于以上成功案例,本文将三维测量技术应用到飞机装配领域,并提出带权重的翼身装配方法,将预装配过程提前,并实现快速准确的间隙检测。
1 算法流程
本文提出的飞机虚拟装配的总体思路是在零部件交付前,先获取由厂家提供的零部件的点云数据,利用摄影测量技术配合三维激光扫描仪获取零部件的点云数据,通过点云处理技术,将稀疏后的零部件数据从整体的点云数据中提取出来,之后利用带权重的精细配准方法,完成待装配部件的装配,并计算最邻近距离作为装配过程中的间隙值;通过将间隙映射为灰度值,可视化地展现装配面中整体间隙的分布。整体流程如图1所示。
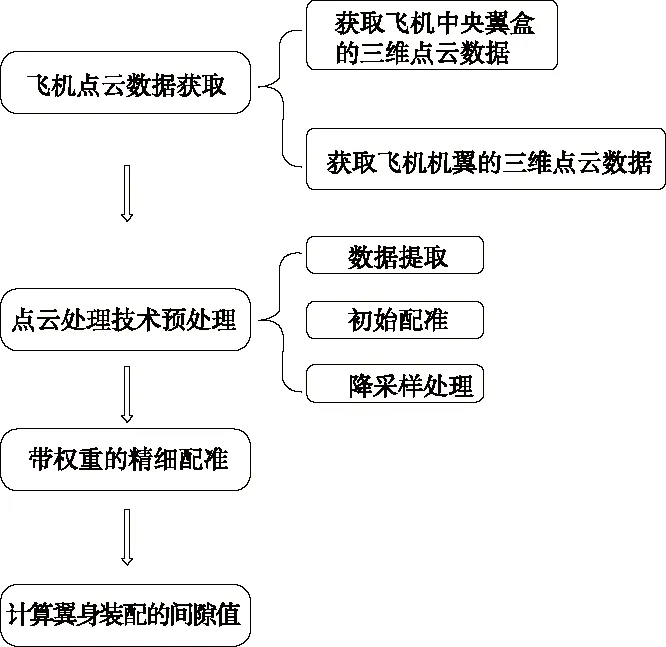
图1 算法整体流程图
2 数据采集及点云处理
2.1 数据获取
在进行扫描之前,将大小为10×10的多个反光标记点作为参照点布置在中央翼盒和机翼的对接面及相邻表面上,并且点与点之间不具有明显相似的位置关系。对于飞机中央翼盒及其上的参照点,利用三维激光扫描仪进行激光扫描,获取中央翼盒对接面及机翼对接面的原始三维点云数据并保存,作为后续操作的原始数据,如图2、图3所示。
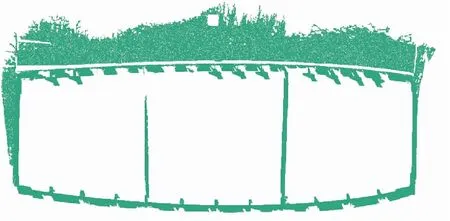
图2 中央翼盒点云数据获取
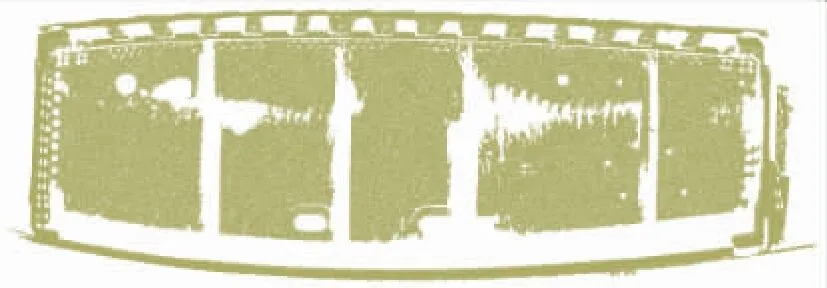
图3 机翼点云数据获取
2.2 数据处理
直接获取的飞机部件点云数据往往包含很多环境中的其他点云信息,无法直接作为数据进行后续配准操作,因此需对数据进行预处理,本文采取的预处理方式主要包括以下步骤:
1)数据提取。将配准主体的飞机零部件从周围的环境中分离处理。对于明显的离群点,如背景中的其他部件,采用手动直接删除;对于难以直接删除的孤立点的离群点,采用欧式聚类的方式去除中央翼盒与机翼之外的周围环境点云,提取剩余点云作为后续操作的初始点云,如图4所示。
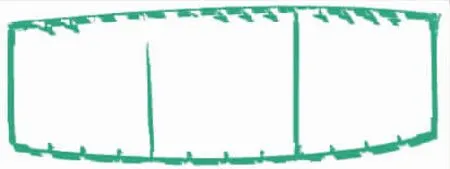
图4 中央翼盒点云数据提取
2)初始配准。由于获取到的中央翼盒数据与飞机机翼数据通常在不同坐标系下,并且与理论位置相差较大,因此为了能够根据实际装配间隙情况,对待装配件的位姿作调整,需要将待装配件放到统一的同一坐标系下,并且具有接近实际装配情况的位姿。本文参照设计理论数模离散的点云数据,利用4PCS方法对待配准部件进行初配准,获得转移矩阵,并以此矩阵作为初配准过程中的转移矩阵,如图5所示。
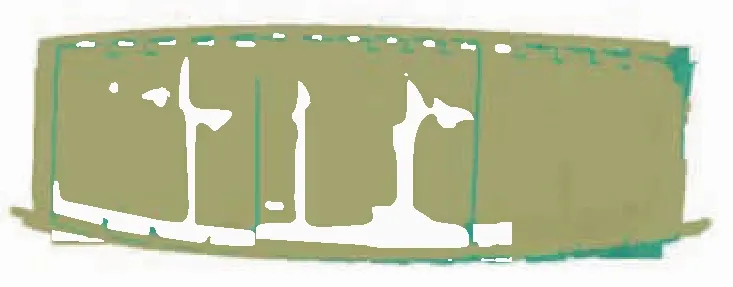
图5 中央翼盒与机翼点云数据初始配准
3) 降采样处理。激光扫描仪直接获取的点云数据通常较为稠密,相对于飞机部件等大型结构,点云总体数据十分巨大,这在后续运算中将加大时间消耗。为此,对经数据提取处理之后的点云数据,分别进行降采样操作,在保证精度的前提下减少点云数量,获取精简之后的飞机中央翼盒和机翼的点云数据。
3 带权重的精配准算法
为了真实反映实际装配过程中,按待装配件特征优先关系进行装配的方法,本文提出了带权重的ICP配准,并将其应用在飞机翼身装配的过程中。具体为:对于两片完成预处理的点云数据,利用带权重的ICP算法进行精细配准,使得初始配准后的两片点云数据统一到同一坐标系下,并可通过调整权重值,改变配准之后的相对位姿,记录配准过程中的旋转变换矩阵。按照记录的旋转变换矩阵,将未经精简的点云数据进行相同的旋转变换。算法的具体步骤为:
步骤1:构建优化目标函数给定初始点云q和目标点云p。
其中:wi为各点对应的装配权重;F(q)为目标函数;R(qR)为旋转矩阵;qT为平移矩阵;qi为初始点云的数据点;pi为目标点云中的数据点。
步骤2:将完成数据提取后的中央翼盒对接面点云数据作为点云P,将完成数据提取后的机翼对接面点云数据作为点云R;以点云P为基准对象,以点云R为待配准对象,分别计算点云P和点云R的几何质心。

步骤3:根据参照物点云P和参照物点云R构造协方差矩阵。
其中:wi为各点权重。之后根据上述协方差矩阵,将协方差矩阵写成对称矩阵形式:

最终配准效果如图6所示。

图6 带权重的点云配准效果示意图
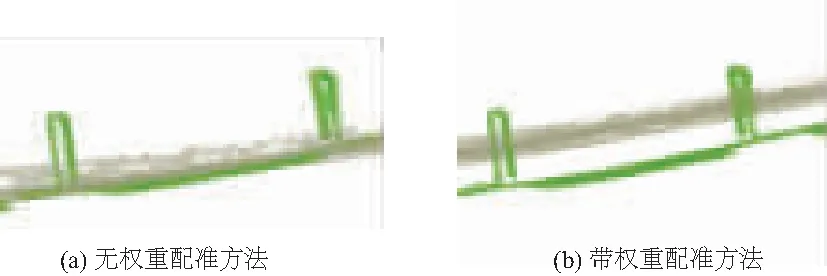
图7 不同方法配准细节比较
4 可视化结果分析
为了分析带权重装配方法的性能,针对某一机翼上的特征,按照实际装配情况下的特征顺序,设定相应的权重,并引入实际测得的间隙分布,绘制间隙的偏差曲线图,如图8所示(不带权重的越偏越大,带权重的较好拟合,整体偏小)。随着水平距离的增加,无权重配准下的飞机装配间隙与真实间隙产生了较大的偏差,这通常是由于无权重配准在过程中趋向于寻找全局最优解,忽视了对于特征的优先保持,这与实际情况是不相符的;而权重配准能在全局最优解的基础上,保持对于特征的优先配准,因此可以看到,整体偏差与实际情况基本相符。
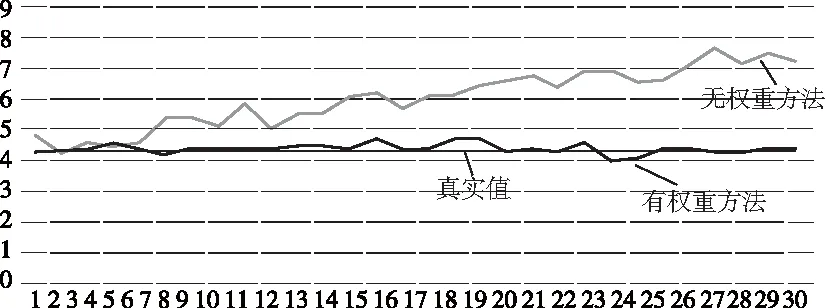
图8 不同方法下装配间隙示意图
5 结语
带权重的点云配准方式具有稳定性强、数据精度高、可使用情景多等优势。本文主要研究结合激光点云数据,按照实际装配中保特征的需求,实现飞机翼身的虚拟装配,并构建了一套完整的流程。通过具体的实例分析,为飞机翼身装配提供了一种新的思路。
