液晶屏老化测试装置运输叉爪的有限元分析
2020-10-21王德力倪俊芳花维维李亮李国防周东风杨波
王德力,倪俊芳,花维维,李亮,李国防,周东风,杨波
(1. 苏州大学 机电工程学院,江苏 苏州 215021; 2. 苏州优备精密智能装备股份有限公司,江苏 苏州 215021)
0 引言
由于液晶屏的制造工艺比较复杂,存在缺陷的概率较高[1],需要经过老化测试工序,快速暴露不良品的潜在缺陷并将其分拣出来。通过同步带驱动叉爪的三轴运动,将液晶屏运输至老化测试装置。由于叉爪悬臂较长且要保证存取过程中液晶屏及其驱动板的安全性,需要校核叉爪的力学性能及振动特性。TAN Z Q、CHEN Y C[2]利用改进的耦合应力理论和双变量方法,在非均匀温度变化和机械载荷作用下研究了三层悬臂微致动器的挠度;杨玉萍、张小美等[3]建立了同步带传动横向振动的运动方程式,将同步带等效为梁振动与弦振动,并对振动系统进行运动分析,推导出同步带运动时的固有频率与速度关系;陈晓明、冯志华等[4]对集中质量悬臂薄板模型的前两阶固有频率进行理论计算、有限元分析及实验测量,并验证了有限元分析对该类型振动固有频率求解的准确性。
以上分析仍停留在对单个梁或同步带进行振动及有限元分析,对于综合性复杂系统并未拓展应用。本文对老化测试装置的叉爪结构进行设计建模;通过温度场与静力学耦合分析,校核形变;通过对叉爪及液晶屏进行负载及空载时的热模态分析与谐响应分析求解前6阶固有频率及其幅频特性,并计算同步带运动时的固有频率以确定避开电机共振的转速范围[5],从而确定叉爪负载运输时的合理速度区间,并检验叉爪的平稳性与鲁棒性。
1 叉爪建模及参数设定
如图1所示,叉爪通过同步带传动可沿移载小车y、z轴方向移动,移载小车在固定的导轨上滑动。叉爪承载部位由6个悬臂梁组成,液晶屏放在有真空吸盘的前端,方便存取。图1中的3为叉爪中的长货叉,长度为1 560mm,叉爪悬臂尺寸及液晶屏尺寸较大,需要对其变形及振动进行有限元分析。
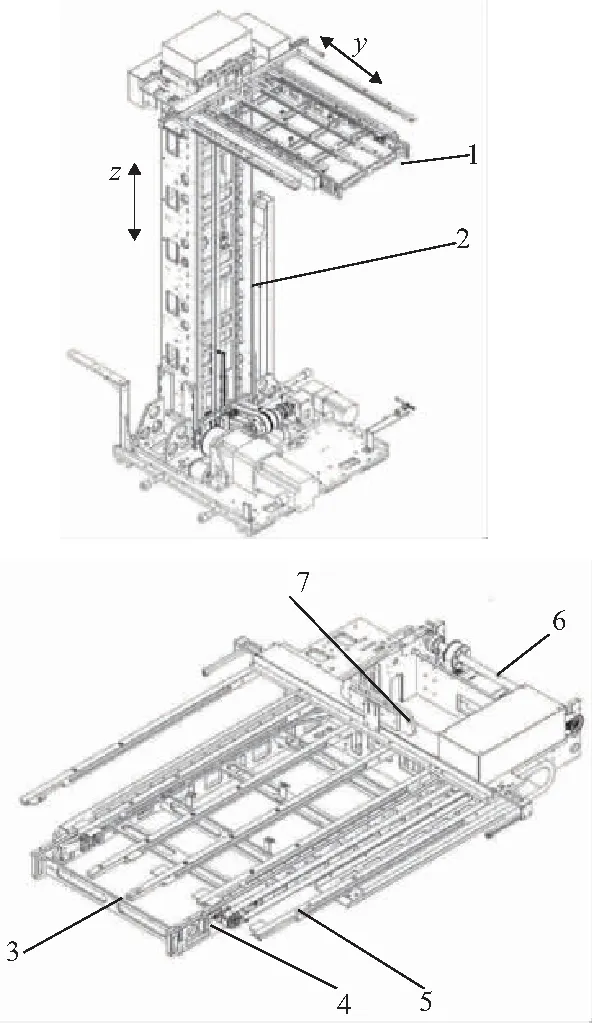
1—叉爪;2—移载小车;3—长货叉;4—同步带;5—短货叉; 6—y轴驱动单元;7—记录仪。 图1 移载小车与叉爪
将叉爪及液晶屏组成的叉爪系统模型导入到workbench18.0中并设置材料参数,叉爪选用材料库自带的铝合金材料。液晶屏的结构比较复杂,由外而内由加固玻璃、光学胶、上偏振片、液晶上基板、液晶等效层、液晶下基板以及下偏振片组成[6],除密度外其力学性能主要由加固玻璃决定,参数如表1所示,液晶屏采用JHC本构模型[7]。

表1 液晶屏主要力学参数
2 叉爪静力学仿真与热模态分析
2.1 静力学仿真
悬臂梁悬臂长度越大,其挠度与应力就越大,因此应针
对叉爪沿y轴完全伸出的情况做静力学、热力学耦合仿真。如图2设定边界条件,在静力学仿真模块添加标准重力加速度并固定叉爪尾部,温度呈线性变化,室温从22℃增加到50℃,总变形图与总应变图如图3所示。由图3可知,变形主要发生在叉爪的前端部,最大变形为2.276 2mm。
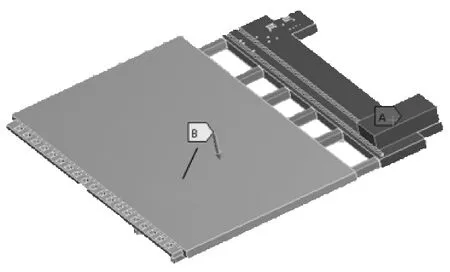
图2 边界条件
图3 总变形云图
2.2 热模态分析
悬臂梁的n阶固有频率fn经验公式如式(1)所示。在材料与横截面都确定的情况下,固有频率与梁长度l的平方成反比,因此梁的悬臂长度越长,同阶的固有频率越小。故对叉爪完全伸出的情况进行热模态分析便可以找出叉爪及液晶屏系统运动过程中的最小固有频率。
(1)
进行热模态分析时将温度设置为50℃并对叉爪尾部x方向进行位移约束,得出叉爪有载时的前6阶固有频率及其振型如图4所示。模型导入时未添加液晶屏,同样的操作步骤可得叉爪空载时前6阶固有频率,如表2所示。
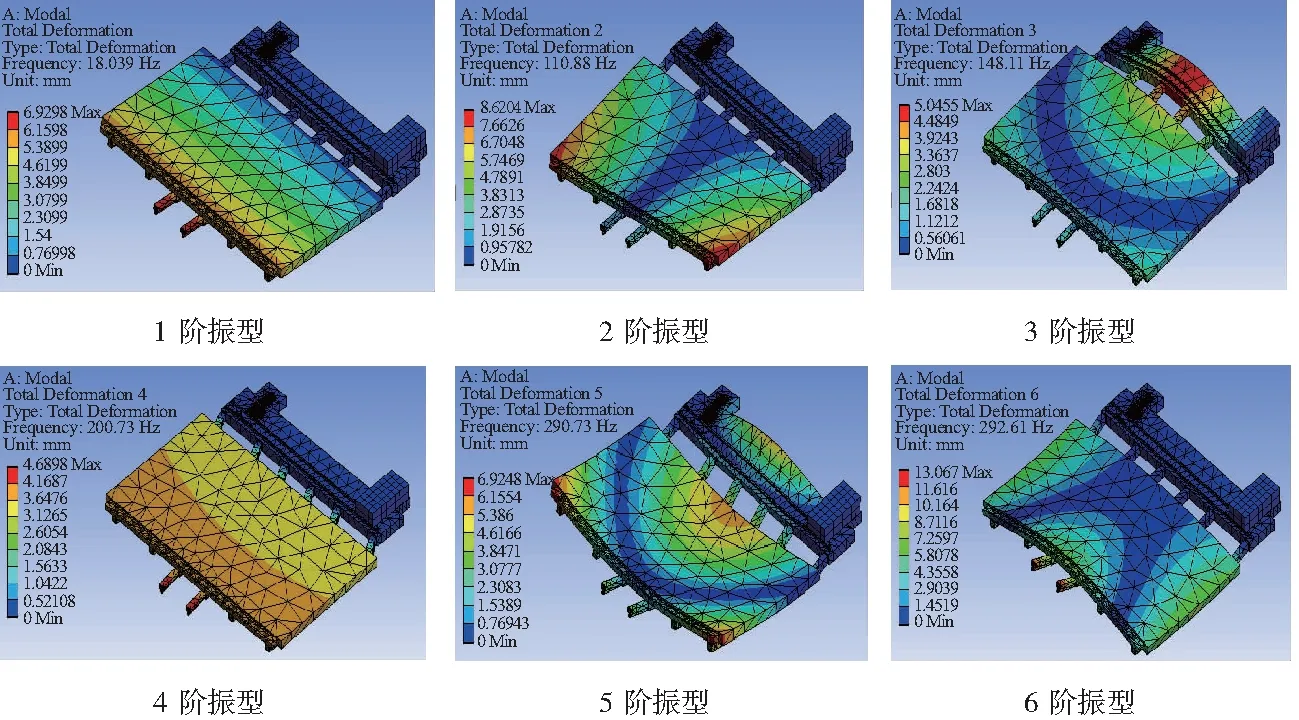
图4 叉爪系统前6阶振型

表2 叉爪系统的固有频率及振型
由图4知,叉爪有载时低阶模态振型的主要变形区域分布在其前后两端,该区域为主要破坏区域。
由表2知,叉爪运载液晶屏时1阶固有频率较小,2阶及以上固有频率都超过110Hz。系统的外部激励源主要为电机激励,采用的伺服电机可调频率为0~250Hz。由于叉爪不需要高速移动,频率一般不超过60Hz[8],因此只针对第1阶固有频率进行研究。
3 振动特性及速度分析
在不考虑同步带及其他元件安装误差的情况下[9],叉爪系统的外部激励主要来源于电机,其额定转速为3 000 r/min,额定功率为750 W,电机级数为2,其转速与频率[10]关系如公式(2)所示。
(2)
式中:n为电机转速;f为电机频率;p为电机级数;传动比i=0.91;D为带轮分度圆直径。
3.1 叉爪结构谐响应分析
伺服电机工作时,许多实际工况都是以简谐波的形式输出转矩,因此必须分析叉爪在工作频率下的谐响应。分别将叉爪有载和空载的热模态分析模型导入到谐响应分析中。用额定功率除以额定转速得到额定转矩T为15Nm,即为电机输出转矩的幅值,所以谐响应分析中的激振力F=T/(iD),将D=62.24mm代入得F=264.84N,频率范围设为0~250Hz,初相位为0,得到谐响应分析结果,如图5、图6所示。
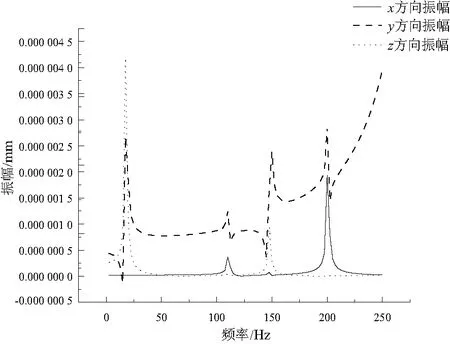
图5 叉爪有载谐响应分析
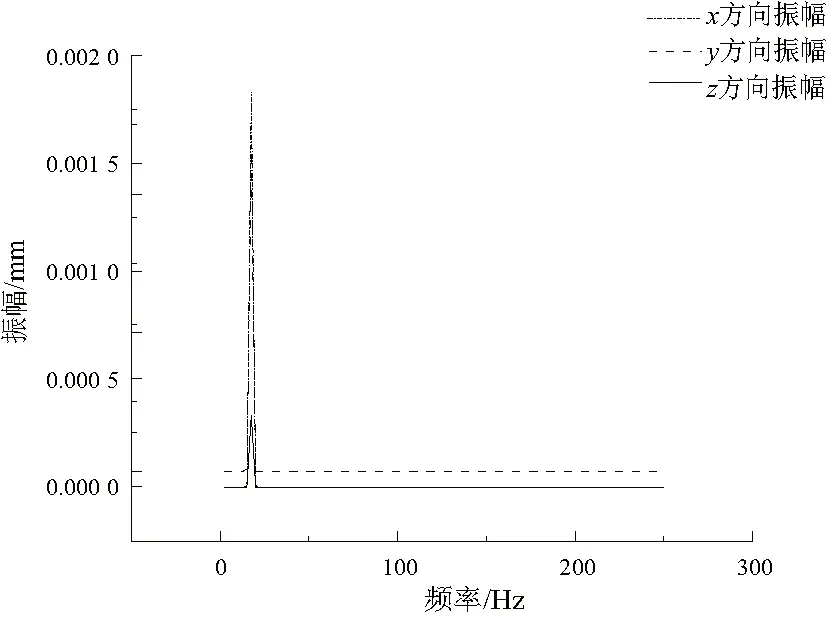
图6 叉爪空载谐响应分析
由谐响应分析可知,叉爪运载液晶屏时,x方向的峰值在200Hz处,y方向峰值舍去高频与z轴峰值都在17.5Hz处。叉爪空载时三轴方向的峰值在17.5Hz处。实际运行速度决定频率远<200Hz,不予考虑,其余的峰值都发生在17.5Hz处,接近叉爪有载及空载的1阶固有频率。因此电机输出的激励频率应该控制在17.5Hz以下,在此区间内除有载时y方向在15Hz时振动幅值取最小,其余都呈上升趋势,故激励频率应在0~15Hz之间。
3.2 匀速同步带固有频率计算及速度分析
电机输出力矩后,经过两级同步带驱动叉爪伸缩,第1级起驱动作用,第2级起传送作用,叉爪卡扣在第2级同步带上用于高精度定位的反复运动[11]。第2级同步带较长,若该同步带共振对叉爪运输的安全性影响很大,故需要对其进行振动分析。考虑带以恒定速度v移动,可将同步带横向振动方程简化为梁振动与弦振动的组合:
(3)
为便于求解自振频率,不考虑由于两同步带轮偏心引起的激振,即将边界条件设为:
y(L,t)=0,y(0,t)=0
(4)
(5)
将式(4)、式(5)带入式(3)得:
(6)

由表2得,叉爪有载时的1阶固有频率为a=18.039Hz,将同步带参数(EI=9.628×10-3Nm2,L=1 650mm,T=123N,ρ=0.095kg/m,带轮分度圆直径D=51.54mm)代入到式(2)、式(3),同步带取1阶固有频率ω1得图7。

图7 频率速度曲线
如图7所示,f为电机的外部激励频率,当0.75ω1≤f≤1.25ω1时同步带发生共振,当13.529 25Hz≤f≤22.548 75Hz时叉爪有载时发生共振。由图7可知,不发生共振的负载速度区间为(0,1.2)∪(2.2,4.6)m/s。为避免冲击载荷过大速度不宜过大,根据现场测试,叉爪负载运输速度取310≤v≤500mm/s,对应频率为3.48~5.62Hz。同理可得空载时速度应<1.167 7m/s,空载速度可取450≤v≤700mm/s,对应频率为5.01~7.87Hz,现场测试如图8所示。
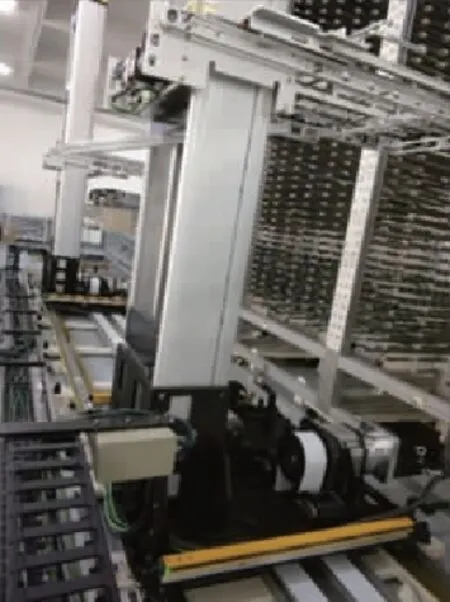
图8 移载小车现场测试
4 结语
本文通过对所设计的叉爪负载运输系统进行静力学与温度场耦合仿真得出其变形与应力值都在合理的范围内;通过对叉爪工作时的情况进行热模态分析得出最小固有频率;通过对叉爪有载及空载的谐响应分析研究其幅频特性,确定激励频率的合理区间,并结合外部激励与同步带振动特性确定不共振的运载速度区间。分析结果与现场测试都表明所设计的叉爪结构在高温下运送液晶屏具有较好的鲁棒性与平稳性。
