冲击激励下磁悬浮转子系统的响应特性分析
2020-10-21邹博徐园平周瑾
邹博,徐园平,周瑾
(南京航空航天大学 机电学院,江苏 南京 210016)
0 引言
磁悬浮轴承因其刚度阻尼可调,被广泛应用于转子系统的主动抑振中[1-2]。目前,许多学者正在开展其应用技术的相关研究[3]。然而,学者们在磁悬浮转子系统的冲击响应特性上的研究还不够深入。LAWRENCE Hawkins等[4]使用地形模拟器激振,测试了车载立式磁悬浮飞轮抗基础冲击的性能。M O T Cole等[5]对柔性转子系统施加冲击载荷,比较了3种控制策略下转子的冲击响应情况。ZHU Changsheng[6]使用力锤对试验台施加冲击力,研究了冲击幅值、脉宽和基础振动模态对磁悬浮转子系统振动特性的影响。实际应用中,冲击信号的组成十分复杂。在不同波形冲击下,冲击幅值和脉宽对响应特性的影响随之不同。同时,当碰到电机故障或叶片磨损时,转子承受的不平衡力会产生波动,冲击响应特性也会随之不同。针对这一问题,本文重点研究冲击激励和不平衡波动对磁悬浮转子系统响应特性的影响。
1 冲击激励时磁悬浮转子系统的运动方程
冲击激励过程中,假设低速旋转的磁悬浮转子系统仍然处于刚性状态。转子质心处的动坐标系为O1xyz,其中,x轴和y轴沿着转子的法向,z轴沿着转子的轴向。坐标系O2XYZ固定在地面作为参考坐标系。在初始时刻,两坐标系各个轴相互平行,X轴和Y轴的正向分别偏离重力方向135°。磁悬浮转子系统的模型图如图1所示。其中,l1、l2分别为两端磁轴承的电磁铁到质心的距离,ls1、ls2分别为两端保护轴承到质心的距离。磁悬浮轴承的结构参数如表1所示。

图1 磁悬浮转子系统的模型图
假设垂向冲击时,转子系统的底座只产生平移运动。将转子的动能T、势能V和耗散能D代入Lagrange方程中,即可以得到冲击激励时转子的运动微分方程式(1)。
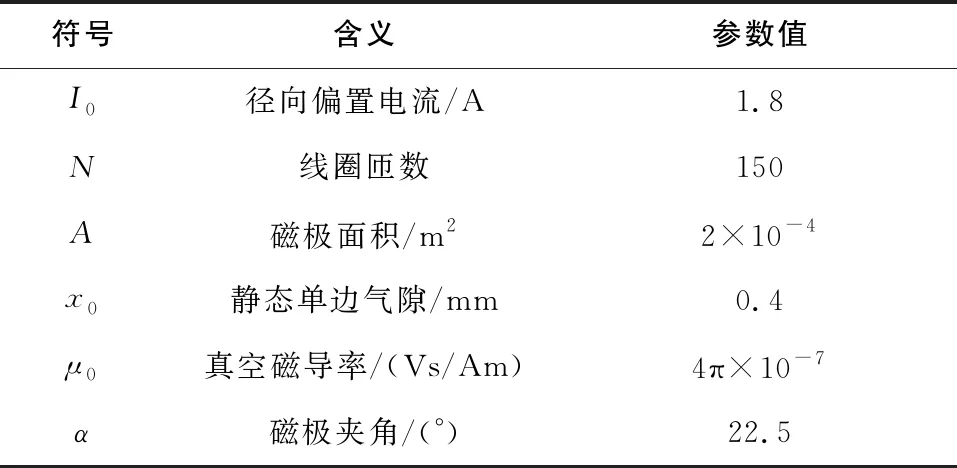
表1 磁悬浮轴承的结构参数
(1)
其中:函数L=T-V;qi为广义坐标;Qi为广义力。转子的运动微分方程为
(2)
其中:qc=[x,y,α,β]T为质心处转子的位移;f为电磁力向量;Fg为重力向量;M为质量矩阵;G为陀螺矩阵;B为转换矩阵;Fu为不平衡力向量;Fb为基础平移振动所等效的惯性力,即
(3)
为了便于研究,将电磁力转化为弹性力和阻尼力,并将位移统一转化为保护轴承处转子的位移,则转子的运动微分方程为
(4)
其中:qs=[xs1,ys1,xs2,ys2]T为保护轴承处转子位移;K、C分别由磁悬浮轴承的支承刚度阻尼矩阵所组成。位移向量之间的转化关系为qc=Rqd和qc=Tqs。其中:qd=[x1,y1,x2,y2]T为电磁铁处转子的位移。
2 磁悬浮转子系统的冲击响应计算
将电磁力的表达式代入式(2)并简化,将其转化到频域,即可推导出磁悬浮轴承的等效刚度阻尼为
(5)
其中:Ki为力-电流系数矩阵;Kx为力-位移系数矩阵;Ga、Gc和Gs分别为功率放大器、PID控制器和传感器的传递函数矩阵;ω为转速。
为了简化分析,在后面的分析过程中,统一忽略基础振动时磁悬浮轴承支承特性的变化,并不计交叉刚度阻尼和耦合刚度阻尼的影响。为不失一般性,选择半正弦脉冲冲击和矩形脉冲冲击进行研究。转子的结构参数如表2所示。
根据相关辨识试验可知,磁悬浮轴承的支承刚度阻尼较小[7],不妨将两端磁悬浮轴承沿各个方向的刚度、阻尼均设定为1×106N/m和700N·s/m。令转速为100r/s,偏心距为5μm,冲击幅值为10g,脉宽为20ms。采用龙格库塔法计算位移,取初始时刻的状态值为0,仿真时间为2s,冲击信号作用于1s时。将观察时间段缩小至0.98s~1.08s,观察左端保护轴承处转子的位移,如图2所示。
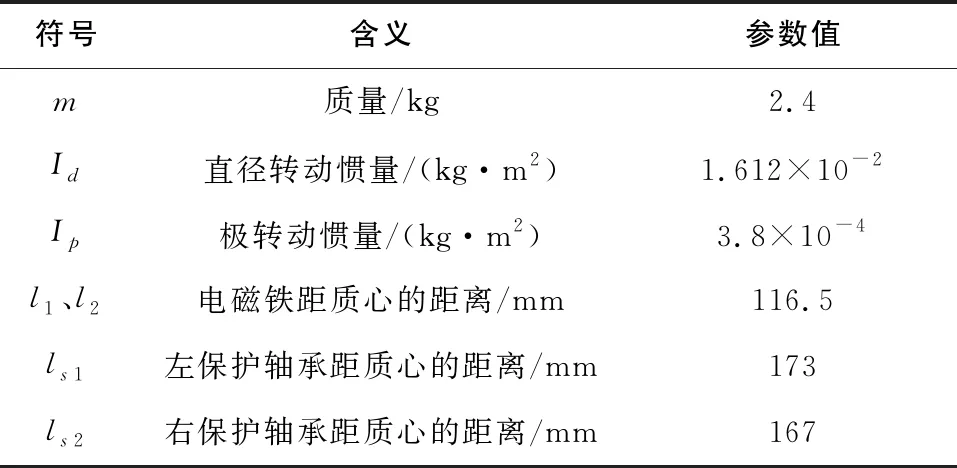
表2 计算用转子的结构参数
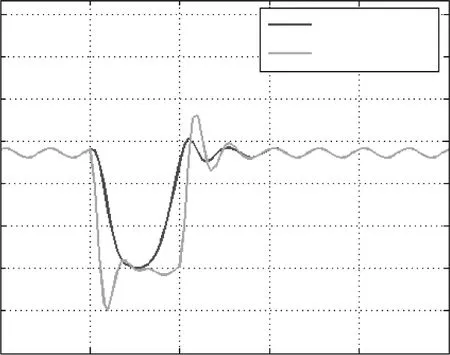
图2 两种冲击激励下转子的响应图
可以看到,转子的最大冲击响应幅值均出现在冲击激励过程中。注意,转子会由于静变形而偏离平衡位置。实际应用中,由于磁悬浮轴承反馈控制环节的作用,磁悬浮转子系统会在平衡位置处波动。
3 冲击响应幅值的影响因素分析
将冲击幅值从1g增加到12g,脉宽从2ms增加到40ms,转速为100r/s,偏心距为5μm,支承参数的数值不变,观察转子响应幅值的变化,如图3和图4所示。
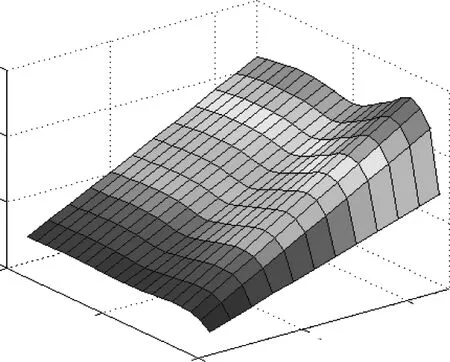
图3 半正弦冲击幅值和脉宽的影响图
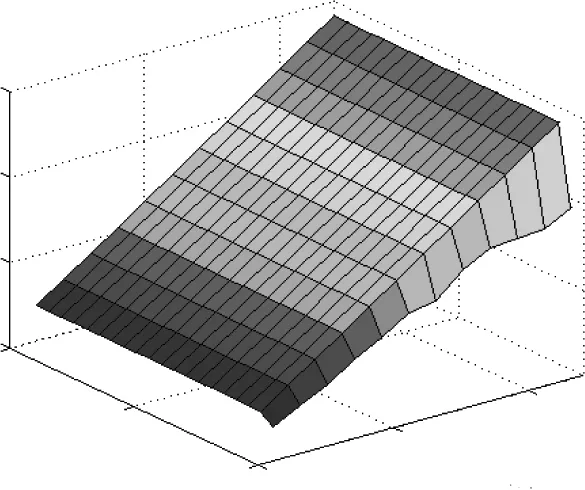
图4 矩形冲击幅值和脉宽的影响图
从图3中可以看到,随着冲击幅值的增大,半正弦冲击下位移增大的速度随着脉宽波动而改变,且在小脉宽条件下位移增大的速度最大。从图4中可以看到,当脉宽>5ms时,矩形冲击下位移增大的速度基本上不受脉宽波动的影响。对比图3和图4可以发现,当冲击幅值为12g,脉宽>5ms时,矩形冲击下的位移均大于半正弦冲击下的位移。
令转速从50r/s增加到250r/s,偏心量从5μm增加到40μm,冲击幅值为10g,脉宽为20ms,支承参数按照式(5)计算,且仍然只考虑直接刚度阻尼的影响,计算转子的冲击响应幅值,如图5和图6所示。分析时取传感器Gs(s)=20 000V/m,PID控制器的比例系数kP=3,积分系数kI=1,微分系数kD=0.002,时滞系数Tf=0.000 1,功率放大器Ga(s)=0.36A/V,力-电流系数为ki=58.77N/A,力-位移系数kx=-2.64×105N/m。
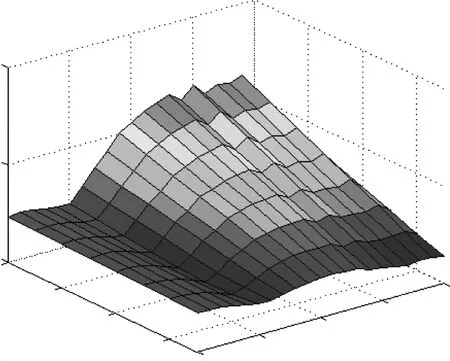
图5 半正弦冲击下转速和偏心量的影响图
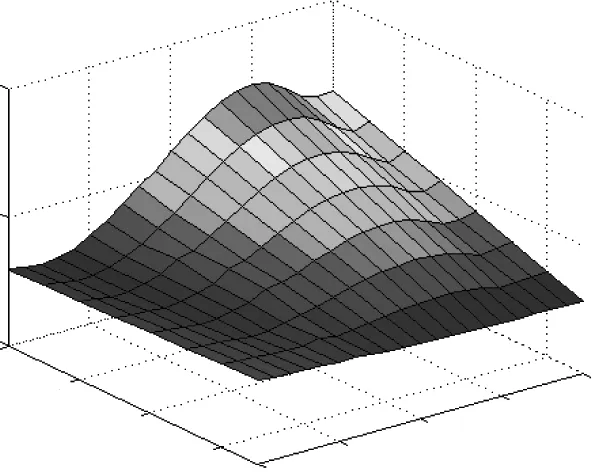
图6 矩形冲击下转速和偏心量的影响图
从图5和图6中可以看到,随着偏心量的增大,位移增大的速度会随着转速波动而改变,且当转速<100r/s时,位移增大的速度较小。当转速>100r/s时,增大偏心量会导致转子的位移迅速增大。可见,在高速条件下,应尽量考虑减小转子的偏心量。对比图5和图6可以发现,矩形冲击下的最大响应幅值明显大于半正弦冲击下的最大响应幅值。
4 结语
通过分析两种典型冲击激励下转子的响应特性,得出如下结论:
1) 随着冲击幅值的增大,半正弦冲击下位移增大的速度会随脉宽波动而改变。而当脉宽>5ms时,矩形冲击下位移增大的速度基本上不受脉宽波动的影响。
2) 随着偏心量的增大,两种冲击载荷激励下位移增大的速度均会随转速波动而改变,且在转速低于100r/s时位移增长的速度比较小。
3)矩形冲击下转子更易撞上保护轴承。在高速条件下,减小偏心量有助于提高其抗冲击的能力。因此,实际应用中应尽量减小转子的偏心量。
