探究外骨骼技术在现代消防救援领域的应用
2020-10-20冯帅颀杨庭瑞崔启煜
冯帅颀 杨庭瑞 崔启煜


摘要:为应对日益严峻的火灾风险,保护人民群众生命财产安全,对消防救援队伍的救援能力提出了更高的要求,而这就要依托于先进的消防装备,使得消防员的负重也大大增加,增大了救援难度。而外骨骼装备的出现及应用将改变这种局面,它不但可以增强消防员的负重能力,同时可以提升消防员的机动性和防御能力。因此外骨骼技术作为一项前沿科技,势必在未来的灭火救援上起到很大的作用,在现代消防救援领域具有十分广阔的应用前景。
关键词:外骨骼;消防应用;人机耦合;机器人;核心技术
人们常说的外骨骼技术指的是对人类的身体进行模仿、可以穿戴在人的身上。在人体进行运动的过程中,对穿戴者的动作进行辅助的一种机械装置,如下图1。该装置穿戴在操作者的身上,能够给穿戴者提供有效的支撐,而且还能够提供额外的动力以及感知能力。从而提高人们的行走耐久性、提升负重能力、增强人体的肢体力量。如今的外骨骼技术已经经历了近100年的发展。外骨骼技术从最开始的军用,逐渐应用到医疗、物流等行业。
1 外骨骼技术的原理与技术优势分析
1.1外骨骼技术工作原理
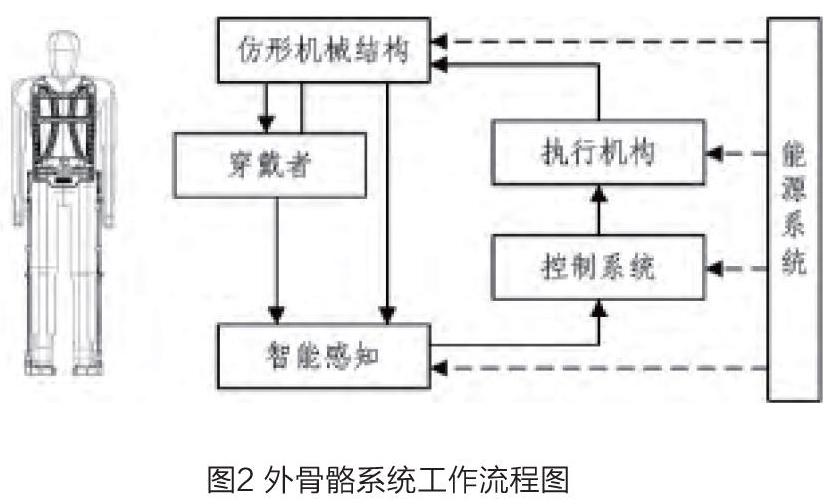
动力外骨骼在工作的过程之中采用的原理通常为:利用仿生学以及动力学原理,对机械结构进行设计,机械系统放置在人体以及外骨骼系统之中,在人的身体上安放各种类型的传感器,比如说在人的膝关节以及背部和人的皮肤表层装一些压力以及加速度与生理信号的传感器,对人体在进行运动过程中的一些信息进行获取感知,同时对人体的生理信息进行感知,然后利用芯片进行滤波以及处理,同时将数据反馈到中央处理器之中。之后处理器会对这些信息进行进一步的处理,同时利用一些感知以及预测算法,对人体所具有的运动状态以及人机耦合度进行调整。整个系统利用各种各样的信息,将其转变成为控制参数,同时利用人机耦合以及控制等办法,对执行器装置动作进行驱动,对人体运动进行跟踪,同时给人体提供合适的推动助力,这能够较好的完成人机耦合协同运动之中的柔顺性需要,能够将人和机械完美的结合成“人-机耦合机械系统”。
1.2技术优势分析
对于外骨骼技术来说,是把人和机械进行了完美的结合,使用者和外骨骼创建出了一个“人在回路”之中的闭环系统。同时设备利用许多传感器对使用者的运动状态以及运动趋势进行感知,同时展开相应的分析,进一步作出反应,这样就能够给人体提供多自由度以及多运动趋势的辅助,这样就能够给使用者的动作进行放大,大大的增强人体的机能,从而使穿戴者成为“大力士”、“闪电侠”。根据有关资料显示,外骨骼系统可以使得一名普通士兵轻松举起90kg的重物,并能在携带该重物的情况下,保证越野速度不低于正常的5km/h。2010年,洛克希德·马丁公司推出的最新产品—“HULC”系统(如图4所示),更是将这个速度提升到了16km/h。在2019年由中国陆军装备部举办的“超级勇士-2019单兵外骨骼系统挑战赛”上,一枚重达四五十公斤的155mm炮弹的装填,原先需要多人合作才能完成,现在只需要一个人便可轻松完成。外骨骼技术的强大可见一斑。
2 外骨骼技术的核心内容
外骨骼机器人,是把机械、生物学、人体传感等多领域技术综合而成的高科技产物,其主要核心技术包括新型传感元件、新型执行元件、新型控制方式与控制策略、高功率密度动力源以及新型材料技术等方面。
2.1新型传感元件
外骨骼机器人系统之中所使用到的一些传感器,可以分为使用者信息收集传感器以及识别机器人自身状态的传感器,因为体积以及重量等方面的限制,在进行设计的过程中,需要通过实际情况对其传感原件进行设计。有部分系统之中使用的是应变片所创建的惠更斯电桥当成是系统的敏感单元,这能够对人体的足底进行有效的压力检测;还有部分的系统使用了微型光学器件类型的传感器,有些还会使用微型阵列传感器等,对使用者的绑带之中所具有的接触应力进行测试,从而判断操作者之后的运动趋势。
2.2新型执行元件
对于新型作动器开展的研究需要重视系统的阻抗特性以及响应速度和安全性等方面的不同问题。在如今使用最多的是串联弹性转动作动器,这种类型的作动器在人体的关节位置增添了1个弹簧,对弹簧形变进行一定的测算就可以获得作动器实际的输出扭矩,这就能够对人体的关节进行扭矩以及阻抗控制。而且,还有一些系统使用电机以及带轮实现当成是作动器,这能够对串联弹簧有就有的刚度进行调节,还有系统使用并联-串联作动器,和一些气动人工肌肉等类型的执行原件。
2.3新型控制方式与控制策略
对于可穿戴外骨骼所采用的控制技术,一方面指的是控制方式,其次指的是控制策略。如果从控制方式层面来分析,如今的一些控制方式包含有肢体映射控制以及生物电控制等多种类型的方式。所谓的肢体映射控制指的是使用人体做出的一些动作对设备的运动进行控制,这在一些外骨骼机器人研究过程中十分常见。
如果从控制策略层面来分析,其中包含两个部分,第一部分是机器人肢体预期所做出的一些动作,第二部分是机器人怎样去完成这些动作。对于第一部分和外骨骼机器人对传感器的信息进行处理有关,这就能够判断出使用者的意图,之后再对机器人的运动模式进行挑选(比如对关节进行控制、对力进行控制);而其中的后者包含有机构动力学以及控制器设计等方面。使用的办法包含有关节结构一级耦合关系创建策略,人体和外骨骼抽象建模虚拟阻抗策略,惯性测量单元感知策略等方面的技术。
2.4高功率密度动力源
外骨骼装备的运行要求高效、长久、轻便、安全地能源供给,动力源问题是外骨骼机器人的关键技术难题之一,尤其是室外应用的外骨骼机器人,通常难以获得外部能源供应。因此,自身能否实现可靠、高密度、长续航时间的集成动力能源供应。是外骨骼机器人能否实现室外使用的核心问题之一。如今随着锂电池,燃料电池的广泛使用和新型高效能源的发展,外骨骼装备的自给持续能源供给问题将得到解决。
